Paper Menu >>
Journal Menu >>
 Applied Mathematics, 2011, 2, 854-865 doi:10.4236/am.2011.27115 Published Online July 2011 (http://www.SciRP.org/journal/am) Copyright © 2011 SciRes. AM Some Applications of Optimal Control in Sustainable Fishing in the Baltic Sea Dmitriy Stukalin, Werner H. Schmidt Institut für Mathematik und Informatik, Greifswald, Germany E-mail: dmitriy_stukalin@uni-greifswald.de Received April 18, 2011; revised May 19, 2011; accepted May 22, 2011 Abstract Issues related to the implementation of dynamic programming for optimal control of a three-dimensional dynamic model (the fish populations management problem) are presented. They belong to a class of models called Lotka-Volterra models. The existence of bionomic equilibria will be considered. The problem of op- timal harvest policy is then solved for the control of various classes of its behaviour. Therefore the focus will be the optimality conditions by using the Bellman principle. Moreover, we consider a different form for the optimal value of the control vector, namely the feedback or closed-loop form of the control. Academic ex- amples are studied in order to demonstrate the proposed methods. Keywords: Optimal Control Problems, Maximum Principle, Piecewise Constant Optimal Control, Bellman Principle 1. The Problem Currently the fish populations in the Baltic Sea have many problems, which are mainly caused by hu man in- fluence. Some fish species are catched too much. The fundamental risk of overfishing is that a stock (occur- rence of species in a given region) is so decimated that the natural regeneration ability is not given and at worst the species die out. The Living Planet Index for marine species of the WW F shows an average decrease of 14% between 1970 and 2005 (see Living Planet Report 2008). The over fishing is the main cause apart from possible environmental factors (climate change, pollut- ants, etc.). Therefore, the goal of the Baltic Sea fishermen must be conscientious, by the policy prescribed regulations and the advance (such as from International Council for the Exploration of the Sea) to protect the Baltic Sea fauna deal. A responsible management must reduce the fishing effort to an environmentally acceptable level and call for the cooperation among the participating countries. This is of utmost importance, since the economic value of the catches depends on the stock and the biodiversity of the Baltic Sea. Several interacting species are modeled, which inhabit in a common habitat with limited resources. So, a dy- namic system is to be studied, which depends on several states and controls (e.g. the number of fishing boats). A typical question for such systems is to find a controller that regulates the system in a desired target. In many applications a cost functional is to be optimized, this is usually a functional of the state trajectory and the con- trols of the system. The profit of a sustainable fishing industry should be maximized without disappearance of the species. In this paper necessary (and sometimes sufficient) op- timality conditions are derived. Numerical methods are obtained from the optimality conditions in order to cal- culate (approximately) optimal controls. 2. Optimal Control P r o b l e m s Whenever a state function depending on the time is de- scribed by an ordinary differential equation which de- pends on the con trol variable, it is called a control system of ordinary differential equations. Optimal control is related to the development of space flight and military researches beginning from the 1950s. We can find the applications of the control theory in economics, in chemistry or even in population dynamics. The general task of optimal control is defined as follows: Let m R be a nonempty (often convex and closed) control region. Let ,, g qf be given smooth  D. STUKALIN ET AL. 855 functions: 1 : : :. n nn n qR R f RR R g RR R A continuous and piecewise continuously differenti- able function (state function) as well as a piecewise continuous (or piecewise constant) function (control function) are called admissible, if the ODE (): RRn x (): Ru 0 00 ,,, x tftxtut ttT xt x is valid. We are looking for admissible pairs x , u which maximize an objective (cost) functional of Bolza type: 0() ,, d,ma T u t Jugtxt uttqTxTx (1) Often the optimal control can be calculated by me- thods using the Pontryagin maximum principle or by solving the Hamilton-Jacobi-Bellman equation. 3. Extended Lotka-Volterra Models with M Populations A logistic model of development for a two-population system can be written in the following form [1,2]. Let be 12 , growth coefficients, 12 , the phagos coeffi- cients and 12 , K K given numbers (capacities or logisti- cal terms). We denote the population sizes as 1 x and 2 x . The differential equatio ns for th e development of the populations are 1 111 12 1 2 222 21 2 1 1 xt x txtxt K xt x txt xt K We denote generally: i are growth coefficients, ij are the phagos coef- ficients of the population i with respect to the population j and Ki are logistical terms. We denote the control of the fish populations i ut (it can be a regulation of the fishing, e.g. the number of the fishing boats if ), pi are fish prices (per ton), ri are catch proportionalities. Therefore, the devel- opment of m populations can be described by a general- ized system i ut N 1 1mj ii iii ij j ii i ii i j x t xt xt xt xt K KK xt utrdK where 0 0 ii x x are given for 1,, .im The objective function (the profit) is to be maximized () 11 0 () max Tmm t i ii iiu ii i xt Jupu trdcdu te K under the restrictions max 0,1,,;0 i utuimt T. c are the cutter costs per day and d is the number of days in which we catch. If we calculate the present value of future profits, we consider a discount rate t e . This plays an important role in economic models. 4. Bellman’s Principle A key aspect of dynamic programming is the Bellman principle. The basic idea is to calculate the optimal solu- tions of many small subproblems and then to compose these subsolutions to a suitable global optimal solution. It was formulated in 1957 by Bellman. An optimal policy has the property that whatever the initial state and initial decision are, the remaining deci- sions must be an optimal policy with regard to the state resulting from the first decision [3]. This idea can be used to derive a necessary and suffi- cient condition. We consider here two forms of the opti- mal controls of (1), namely the open-loop form and the closed-loop form. The closed-loop form gives the optimal value of the control vector as a function of the time and the current state. The form of the optimal control vector derived via the necessary conditions is called open-loop. However, even though the closed-loop ˆ,utx ˆ,u and open-loop * u controls differ in form, they yield identical values for the optimal control at each date of the planning horizon. It follows t * ˆ,utx * ut. The open-loop form gives the optimal value of the control vector as a function of the time and the initial values of the state vector. The closed-loop form of the optimal control is a decision rule, for it gives the optimal value of the control for any current period and an admis- sible state in the current period that may arise. In contrast, the open-loop form of the optimal control is a curve, for it gives the optimal values of the control as the inde- pendent variable time over the planning horizon. We consider an optimal control problem (1) under the control condition: 0 ,,, m utRtt Tu is piecewise con- Copyright © 2011 SciRes. AM  D. STUKALIN ET AL. 856 tinuous. st function The co 0 ,:, n Vtx tTRR is defined as , (2) where : () ,max ,,d, T ut Vtxg xuqTxT :, m utTR is admissible in ,tT and x is the corresponding trajectory with x tx . ective ,tx gives the optimal value of the o fuVbjnc- tion starting from the time 0,ttT and the starting point x, followi ng the ODE. We define the Hamiltonian H as ,,, ,,,H txuVtxgtxuV,,, xx txftxu Necessary condition e value function to the prAssume there exists th ,Vtx oblem (1) in 0,n tT R and this function is continu- ously differentia Let *()u be an o ble. pen-loop optimal solution of (1). Then thrresponding closed-loop solution ˆ(,)u e co sat- isfies the condition ˆ, argmautx x,,,, ,n x uH txuVtxxR and 0,ttT and ,Vtx is a solution of the PDE: 0 ,, , ,,. tx u V txtt T V TxTqTxT max ,,, ,H txuVtx Proof: is the cost function for the part of ,txt t the solution, that beg Vt ins at the time tt with state x tt . Then for 0tT t it is: Since V is assumed to be continuous differentiable and g ,tx () max , ,d,. tt u admissiblet V gx uVttxtt to be continuous, ,, d tt x u t g can be ap- proximated for every continuity point t of ()u as ,, g txt uttot ,where ∆t is sufficientlyll. sma It follows: () ,max,, ,( u admissible xgtxt utt Vt txttt , where represents the higher order terms, that Vt ()ot means 0 lim 0 t ot. t ing to Taylor’s theorem it is: Accord ,,, , t x Vt txttVtxtVtxt t V txtxttot Substituting this result into the previous equation and using ,, x ftxu , it follows for the partial di0t fferential equation 0max , ,,,. x , ,t u 0 g txt uV txt Vtxtftxtu t (3) We can write the PDE (3) as ,max,,,,VtxHtxuVtx , x (4) because t u ,Vtx n does not depend on u. The conditio boundary ,,xT qTxTV T follows (4) is the Hamilton-Jacob volution equation with a fin immedi- ately. The PDEi-Bellman equation. It is an eal condition. The global solvability, assumed in the first definition, is not assured in general1. Sufficient condition If it’s given on 0,n tT R a real, continuously dif- ferentiable function ,tx, wh equation Vich satisfies the Hamil- ton-Jacobi-Bellman , ,,,, tx u V txtxuVtx max ,, H VTxTqTxT (5) and if the control ˆ,argmax ,,,, x u utxH txuVtx (6) (depending on t and x) is admissible, then sponding open-loop controlwith the cthe corre- orrespond- *()u ing state trajectory *() x is an optimal solution of (1). Proof: Since the left-hand e is independent from u, (5) can bermed into: sid transfo max,, , ,,0. tx uVtxH txuVtx (7) *()u and We choose admissible open-loop controls ()u on 0,tT. Let *() x and () x be the unique state trajectory, h are atewhicnerand in ged by *()u ()u 0,tT, so that 00 . *0 x tx tx Then it m : follows fro(6) and (7) 1The name refers to William Rowan Hamilton (1805-1865), who contributed to the developmen t of the calculus of variations, to Carl Gustav Jacobi (1804-1851), who studied the theory of sufficient conditions in the calculus of variations, and to Richard Bellman (1920-1984), who brough t the dynamic programming on the way. By the way, this equation comes from Constantin Carathéo dory (1873-1950), whose name was not men tioned. Copyright © 2011 SciRes. AM  D. STUKALIN ET AL. 857 x With the definition of the Hamiltonian *** * 0, ,,,, ,,,,. t txH txtutVtx xtutV tx , tx V VtxH t x H gV f and taking into account d,,, ,, d VtxVtx Vtx f txu tt x that this inequality can be written as * ** d, 0,,d ,. d Vtx gtx t utt x t We integrate this inequality over the interval d ,, Vt gtxt ut 0,tT and obtain , by using 0 0 ** * 00 ,,,d, T t t Vt xgtxtuttqTx T ,, d , Tgtxtutt qTxT 0 00 d,,,,, d T t VVTxTVt xVTxTqTxT t . was added on both sides. Since 00 ,Vt x ()u s them is arbi- alue of the objective functional i maxi- he control [4,5]. 5. Algo o formulate a construc- tive algorithm: trary the v mized by t*()u rithm Now we can use this therem and 1) Identify ,, ,,, ,, f txugtxuq xt fic problem. with the mizing value functions of a speci 2) Write down the corresponding Bellman equation. 3) Calculate ˆ uas function of ˆ ,, :,,. xx txV utxV from ˆ,, 4) Add the ma xi x utxV in the right-hand side of the Bellman equatio- mby usin We mpare this mod with knods n. (PDE) 5) Solve the Bellman equation. (analytically or nu erically) 6) Compute ** (), ()xu for 0 ttT g 3. 6. An Example. The Comparison with Methods Using the Maximum Principle want to coethwn metho based on the Pontryagin maximum principle. Let us consider the problem: , x txtut 0 0, x x ()u piecewise constant 12 11 1min 2 0 d 22 Ju ttx (8) A necessary optimality condition for (8) is the maxi- necessary conditions were developed by Pontryagin and his co-workers in Moscow in the 1950s. They introduced the idea of adjoi append the differential equation to the objective func- tio conditions that the adjoint function should sa mum principle. The nt functions to nal [6]. Note that, the adjoint functions hav e a similar purpose as Lagrange multipliers in multivariate calculus, which append constraints to the functions of several variables to be maximized or minimized. Thus, one begins by finding appropriate tisfy. Let ** (), ()xu be optimal, then there is a nontrivial solution of the adjoint equation ** ,,,,tHtxtutt x so that for almost all t ** * ,,, max,,,, u H tx t u ttHtx t ut and the transversality condition q tT x . In our example it is is sat- isfied 2 1 ,,, H 2 txuux u sequently and con ,Ht ,, 0.xu u u That means * ut t in the profo r almost all t. cess equation, we obtain a y value problem: Replacing this two-point boundar , 0, 0 x txttxx , 1t t ,,,1.Htxu x x The solutions of these equations a re: 121 1 , , 01. 2 ttt tCextCe Cet The initial condition 210 2 1 CC x and the final con- dition 1 21 1 12 C eCeCe 1 give the constants C1, C2: 2 00 12 23 . 22 , 13 13 x x ee Therefore, it follows the open-loop-solution e CC Copyright © 2011 SciRes. AM  D. STUKALIN ET AL. 858 2 ** 00 0 2 2 . 13 t 2 3 , 13 tt x exe xt ut ee ellman principle provides the same solution in another way: Find the function such that xe (9) The B ,,Vtx 2 1 ,1, 1 1VTxVxqxx 2 ,m ax,,,,. tx u VtxHtxuVtx Due to 2 1 ,,, 2 xx H txuVuVx u the nec- esr a ma H in sary condition foximum ofuR is ,,, 0. x HtxuV u This is exactly satisfied when x uV, that means ˆ,, x x utxV V. We have in mind . Therefore, UR 2 1 ˆˆ ,,, . 2 xxxx H HtxuVVVx V this t has the form: The Hamilton-Jacobi-Bellman equation for ask 2 1 2 txx VxVV . We use the ansatz because the objective function, as quation with respect tu 2 ,,VtxAt x well as the process e o are polynomial. Then it follows 2 x 22 ,. 13 t Vt xe Therefore, 22 ˆ,13 xt utxVe By using the differential equation the open- 2 , . x tx loop solu- tion can be calculated. It is 0 22 2, 0. 13 t xt x txtx x e and this initial value problem has the solution 2 *00 2 3. 13e With respect to tt xe xe xt ** ˆ,ut utx we obtain the opti- mal control *02 2 13 t x e ut e as a func-tion of the time t. Control Problems w ith Piecewise Constant Controls Now we consider problem (1) with piecewise constant controls. th of the intervin - ble. 7. Closed-Loop Optimality Conditions for If the lengal is fixed, the Pontryag maximum principle in the classical form is not applica There is an alternate Pontryagin-like-way. Let *t u kk uut be optimal on 1 , kk tt . Then it follows: 1k t H * ,,,d uk t txtuttt 0, (10) e Bellman principle we can also win optimal- ity k Using th conditions. Let be 01n tt t predetermined time points and () x absolutely continuous. The problem is now: 1 1k t n k 0,, ,max k kt nn u J ugttdt xtu qt xt (11) The process equation is: ,,, k xtf txtut if 1kkk k ,), 0,1,,1.tT ttn The optimal control * k t uu is to be found. At first we consider the special case n = 1 (one control interval). We denote 0 ut v and define the new tion for the process, which starts at value func- ,, ,Wtxvg x 1 11 , d, t t v qtxt time t with the vector x tx d witand is performeh the constant control v . This function W is continuously differentiable in t and x. It is not to be confused with the function V (chapter 4), sins no maximum operator. We can form necessary conditions [7]. Ne ce here i ulate new cessary condition Let ,,Wtxv be continuously differentiable i t and x. Let n ˆ,utx be e process an optimal constant control that leads th ,,,, x tf txtutxxtx from x on 1 ,tt . The control ˆ u is constant also in 01 ,tt. control Then this ˆ,utxsatisfies for all 01 ,ttt the condition 00 00 ˆˆ ,,argmax,,utxut xWt xv v here ,,Wtxv satisfiwes the partial differential equa- tion: ,, ,,,,, WtxvWtx,, v f . txv g in other words, txv tx v Copyright © 2011 SciRes. AM  D. STUKALIN ET AL. 859 1 0 ,,,, ,,,, , ,,, n i ii n xvWtxv ftxvgtxv tx txvt tR 1 and Wt 111 ,,,, .Wtxv qtxtv Proof: The proof is similar to the previous one. ,is the cost function for the part starts at the time with state ,Wttxt t v of the solution, that tt x tt under the infl It is obviously: uence of the co Since W is assumed to be continuous diferentiable an ntrol v. ,,,,d,,, . tt t WtxvgxvWt txt tv v f d g to be continuous, ,,d t gx v tt can be ap- proximated as ,, g txt vtot. ows: , ,,xt vt Wttxt It foll ,,Wtxvgt represents the higher order terms, that mean , . t v ot ot s 00 ot t . According to Taylor’s t lim t heorem we obtain: ,, ,, ,, ,,. x W ttxttvWtxtvWtxtvt Wtxtvxt tot t Substituting this result into the previous equation,t follows with i ,, x ftxv the PDE , 0,, (,, t ,, ,, x g txt vWtxt v Wt xtv ftxtv or in another form ,,,, ,,,,. WtxvWtxv f txv gtxv tx In the special problem it is so The boundary condition 0,,,,JvWtxvv the optim al contr ol vect o r c an be obt ained by max,Wt x 00 00 ˆ,arg, v ut xv 11 ,, ,Wtxv qtxt 1 follows immediately. trol intervals the definition of neces- alogous. Let be In case of n con sary conditions is an 01 1 ,,, n utv vv v The function with .,0,,1 k vk n ,,Wtxv is for all 1,,1 kk ttt kn defined as: ,,,, d k t t Wtxvg xv d for all 1, nn ttt as: n t an ,,,, d,. nn t Wtxvgxvqt xt It follows for all 1,,1 k t k tt kn : 1111 ˆˆ , argmax , v utxutx W Wtx ,,, , ,,, ,,,,, kk kk ttxt v vWtxv ftxv gtxv tx ,Wt qt x ˆ 0, ,, ,,,1, 0, ,,. kkk nn WtxvWt xut xkn xv v 8. Open-Loop Optimality Conditions for Control Problems w ith Piecewise Constant We can also formulate the optimality conditions for te problem (11) in open-loop form. Let Controls h , x tv be a solu- tion of the process equatio n 1 ,,,,,, , kk xtv ftxtvvtvtt t , with , kk x tv xt for , for all 0, ,1kn v and 00 () x tx . The Hamiltonian is: ,,,,, H txv gtxv ,, f txv . We consider the special case n = 1 (one trol interval) con. Necessary condition in open-loop form Let ** (), ()xu be optimal with * 0,t ut * u ** 0 , x txtut, then it is *000 argmax ,,, v utStvtvxt 0 where ,tv is a soluf tion o ,, ,,, tvH txt x tvt t 01 ,,,,,v vtv (12) and ,Stv is a solution of ,, ,,,,, , Stv H tv t Htxtv vtv ,,,,txtv v x tv x (13) Copyright © 2011 SciRes. AM  D. STUKALIN ET AL. 860 with 00 0 , x tv xt x and the transversality condi- tions 11 1 , ,qtxt tv x and 11 11 , ,, qt xt Stvxtvqtxt 11 , x are satisfied for all Proof: nsider the equatio .v We con (13): ,,,,,, ,,,,,, Stv Htxtv vtv t Htxtv vtv x tv x is equivalent to ,,,,,, ,,,,,,. Stv gtxvtvf txv t Htxtv vtv x tv It follows fro m (12) x ,,, ,, ,,. Stv g txvtvxtvtvxv t We integrate this equation over t 1 ,tt : 1 11 ,, ,,d, ,,. t t StvStvgxvtv xtv tv xtv 1 t 1 , From the previous we obtain ,,d t gxv the transversality 11 ,, ,Wtxvqtxt co and from nditions 11 ,,tv xtv xt 11 1111 11 , ,,, ,. qt xt Stvxtvqt xt x qt It follows: , n ir because is constant. It follows with . the right-hand side of the equation is the function of We obtain the open-loop form: ,,,,, , ,,,. StvWtxvtv xtvWtxv Stvtv xtv As shown the pevious chapter it is ˆ u 00 00 ˆ ,,arg max,, v txutxWtx v ˆ,utx 00 0000 0 ,: ˆ,argmax,, v xt vxt utxSt vt vxt The term on 0.t *000 argmax ,, v utStvtvxt 0 . nition of neces- sary conditions is analogous. We have to maximize: n In case of n control intervals the defi 1 0,,d, k t n kn kt 1k J ugtxtuttqtx t under the constraint: 00 1, ,,, ,. kk k k x tftxtutttt xtx ut ** (), ()xu be optimal with ** , k ut ut Let ** ,k x txtut, for 0, ,1,kn then it is *argmax , k ut St, k u tuxt , k u k where ,Stv is a solution of ,,,,,, ,,,,, , Stv Htxtv vtv t Htxtv vtv x tv x (14) and ,tv is a solution of ,,H tv x 1 ,,,,, ,, , kk tvtxtv v tvt t (15) with 000 *1 * * ,, ,0, 0,, , 0,, , kkkk kkk kkk xt vxtx xt vxtxtut tv tut StvSt ut , he tran ns and tsversality conditio , ,, , ,, nn n nn nn qt xt tv x qt xt St vxtqtxt x nn are satisfied. 9. An Example. The Multistage Open-Loop Control We want to solve a two stages-optimal control problem. Copyright © 2011 SciRes. AM  D. STUKALIN ET AL. 861 Let be 0,1t and 01 0,tt0.5. 01 0.5 ,0.5;1TT We obtain two time The process equation is: intervals: 0; . 0 ,0,1;0 k, x txtutkx x 6) piecewise constant: (1 ()u 1 1 01 01 122 22 0 ,,, 0,, 11 d1min 1 d1 22 k k t k kt ututv v ututT Jvtx vtx v v ) The Hamiltonian is 0 1 0.5 ,,utut T (17 0 1 22 1max k k k kt t J v v v ut 2 1.,,, 2 H txv x The r the problem (17) are: (18) , (19) and it is v v necessary conditions fo ** 1 0.5 argmax0.5,0.5,0.5,, v uu Sv vxv ** 00 0argmax0,0, v uuSvvx 11 2 11 1,1, , 1 1,1, , 2 vxv Sv xv v v It follows for 0,1i: 2 ,,, ii tv tv 1 ,, 2 ii ii St vtv vv and 00 10 ,,, 0,,0.5,0.50, iii xtvxtvv x vxx vxv (20) The transition conditions are: The solutions of the ODE * 01 * 01 0.50,0.5,, 0.50.5,. vu vSu 0,S ,, iii x tvxtv v 0,1i are 0 1 , . 01 0 12 1 ,, ,, t t x tvA evtT x tvA evtT According to 0 0 x x we obtain 00vx 1 A and with (20) 0 00.5 1 . 20 A xvvve Therefore, 0.5 10001 1 10.5 100011 0.5 100 0 1, , 0.5, t1 ,,, x tvxvvvee vtT xvxve vve xvxvev v and 1 ,, t i tv Ce 0,1.i final cT 1 delivers he ondition fo r t = 11 10 00 01 1 1, 1,vCex .5 x vev vev v anonstant re, d gives us the c. 1 C Therefo 1 1 ,, t i tvve e 21.5 00 01 0,1. x vevve i 1 tT It follows for : 2 1111 12 1 1 1 ,, 21. 2 t Stvtv vv 21 .5 0001 1 x vev veve ve v The solution of this equation is: 21.5 100011 1 1 , 2 t Stvx vev veveve We obtain from the final condition: 2 12 1.vt C 2 C 1 10 1, vx0.52 0011112 2 210.5 00 01 1 1 2 11 10, . 22 SvevvevvvC xxvevvev v Due to (18): 0 .52 000 () ** 1.512 0.52 000 2 210.5 000 1 1.51 0.5 00 0 0.5 00 0 0.5, 0.5, 1 argmax 4 11 () 22 () v u vxv 1 0.5argmax 0.5, v u Sv x vvev vvevev vxvevvev xvevve ve xvev This is exactly satisfied when (with differentiation ov itution xv vevvvev er v and subst* 00 vu : 0.5* 0.5 00 *10.5 1.5 1 21212 42 3. x eue ue ee e (21) Analogically, we obtain for 0:tT Copyright © 2011 SciRes. AM  D. STUKALIN ET AL. 862 2 0000 2*1.5*1 00011 00 1 ,, 21. 2 t Stvtv vv 2 x vev ueue vev 0:T That ODE has the following solution on 2*1.5*1 000 0110 2 03 , 1 . 2 t Stvxv evu eueve vt C We obtain from the final condition: 3 C *2 *2 11 00 422 uu xveu 10 0 3 **1.5* 1001 01 2 1* 0.5* 011 *1* *0.5*2 0010111 4 (0.5,) 111 S Suxv uevu u v eu xvuevuueu Therefore, 1.5* 1 0000 010 *0.5 2 (0.50,) 1 vxv vevuve uvev C * 1*20.5 11 eu e *2 1* 0.5 10 1 11 ** 2*1.5*1 011 * 1.5** 1*20.5*2 011111 2 * 1 *1* *0.5*2 0111 1 1.5 * 01 (0)argmax(0, )(0, )(0) argmax 1 4 22 v uuSvvx 0v x vvev uveuve x vuevuueu eu xvuevuueu xvvevuve ux vevueu 1*0.5 2 1 2*1.5*1 0110 1 4 uve v xve vueuex It follows: 0.5*1.50.5 01 *2 0.5 212 2 422; 0 x eueee e ee u (22) and from (21) and (22): 0.5 ** 0 21.50.5 0.5 ** 1 0 2 1.50.5 2(1 ) 0 34 442 2( ) 0.5 , 34 442 e uux ee ee ee uu x ee ee The optimal trajectory is: 0 , *** 000 0 ****0.5* 00011 1 ,, ,, t t xtxueutT x txuuueeutT and e This solution can be confirmed by substituting these values into the integral maximum principle. It is: 0 0 10. Various Types of Control Functions Now we can compare the three types of tasks. 1) Piecewise continuous or measurable control func- tions: Here we can apply the Pontryagin maximum prin- ciple and the Bellman principle. e constant functions and fixed : In this case we can use the Bellman principle (in terms of [7]) and condition (10) [8]). 3) Integer valued control: : the Pon- the Bellman principle (in terms of [7]) and an additional constraint of the form *2**1.5 *1 00011. t txueuueue 0.5 0.5 ** * 00 00 11 ** * 11 0.5 0.5 ,,,d()d ,,,dd u u Htxtuttt ut Htxtuttt ut 2) Piecewis k t kk utu Z tryagin maximum principle is not applicable. In this case we can use 1 0. k i i uu The following application areas are currently offered: (PMP is tmum Principle) Control funct ionsPMP Bellman Other methods he Pontryagin’s Maxi Piecewise continuous or measurable controls classical form applicable reduction to “direct methods” [9] Piecewise constant and fixed t integral form [3]applicable reduction to “direct methods [9,10] k Integer valued controls and fixed tk doesn’t work applicable ________ 11. Numerical Solution Using Standard Software For a concrete example of (cod-herring-sprat) we choose: 1 111 1 6 0.411.525010 xt xtxtxtut 12 13 xt x txtxt 22 22 0.02 0.02 ; 1.2 1.3 0.6 16.4 2 3 250 1 1.56 6 12 13 1.2.210 0.01250.01 ; 1.2 3 31 3 0.6 16.4 2506 1.3 1.3 10 x txt xt xtut xtx txtxt x txt xt xtut 13 23 () 0.01250.01 ; xtxt xtxt 1.3 1.56 Copyright © 2011 SciRes. AM 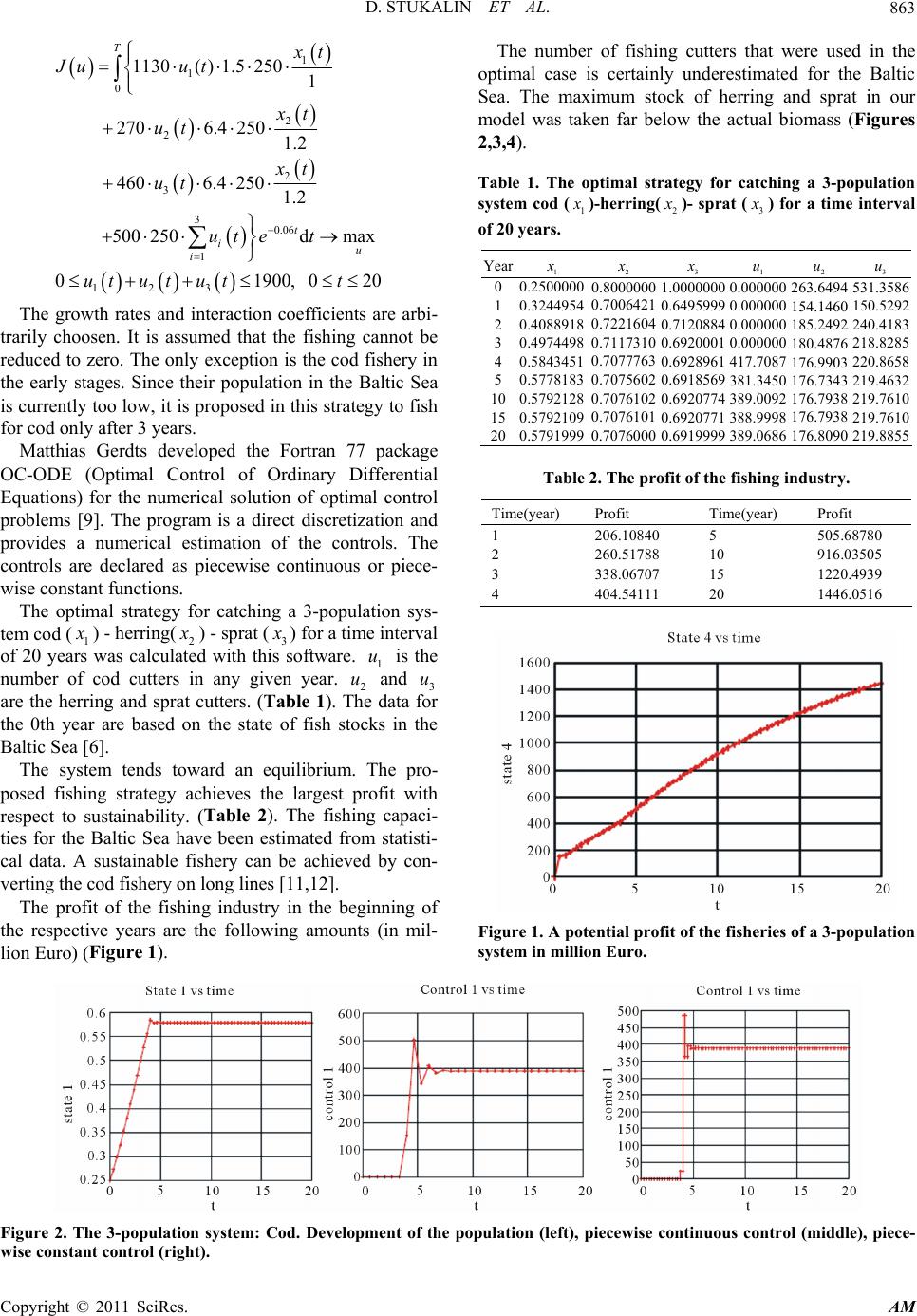 D. STUKALIN ET AL. Copyright © 2011 SciRes. AM 863 1 1 2 30.06 1 3 1130( ) 1.52501 1.2 6.4 2501.2 d 1900 t i xt Ju ut xt ut ut et ut es incoeffi arbi- trarily choosen. It is assumed that the fishing cannot be ery in the Since their population in the Baltic Sea is currently too low, it is proposed in this strategy to fish Matthias Gerdts developed the Fortran 77 package OC-ODE (Optimal Control of Ordinary Differential Equations) for the numerical solution of optimal control problems [9]. The program is a direct discretization and provides a numerical estimation of the controls. The controls are declared as piecewise continuous or piece- wise constant functions. The optimal strategy for catching a 3-population sys- tem cod ( 1 0ut 250 i ut 0 2 2 2706.4250xt ut 3 2 and 460 500max u , 020 t T The growth ratteraction cients are reduced to zero. The only exception is the cod fish early stages. for cod only after 3 years. 1 x ) - herri ng(2 x ) - sprat (3 x ) for a time interval of s calculated wiware. is the number od cu any n year. and are the herring and sprat cutters. ().e data fo the 0th year are based on the state of fish stocks in the Baltic Sea [6]. The system tends toward an equilibrium. The pro- posed fishing strategy achieves the largest profit with respect to sustainability. (Table 2). The fishing capaci- ties for the Baltic Sea have been estimated from statisti- cal data. A sustainable fishery can be achieved by con- verting the cod fishery on long lines [11,12]. The profit of the fishing industry in the beginning of the respective years are the following amounts (in mil- lion Euro) (Figure 1). w the actual biomass (Figures 2, 20 years wa of cth this soft give Table 1 1 u 2 tters inu Th3 u r The number of fishing cutters that were used in the optimal case is certainly underestimated for the Baltic Sea. The maximum stock of herring and sprat in our model was taken far belo 3,4). Table 1. The optimal strategy for catching a 3-population system cod (1 x )-herring( 2 x )- sprat (3 x ) for a ti intervl of 20 years. Year 1 me a x 2 x 3 x 1 u 2 u 3 u 00.2500000 0. 1 2 3 4 5 10 15 0.3244954 0.4088918 0.4974498 0.5843451 0.5778183 0.5792128 0.5792109 8000000 0.7006421 0.7221604 0.7117310 0.7077763 0.7075602 0.7076102 0.7076101 1.0000000 0.6495999 0.7120884 0.6920001 0.6928961 0.6918569 0.6920774 0.6920771 0.000000 0.000000 0.000000 0.000000 417.7087 381.3450 389.0092 388.9998 263.6494 154.1460 185.2492 180.4876 176.9903 176.7343 176.7938 176.7 531.3586 150.5292 240.4183 218.8285 220.8658 219.4632 219.7610 2938 219.7610 00.5791999 0.70760000.6919999 389.0686 176.8090 219.8855 Table 2. The profit of the fishing industry. Time(year) Profit Time(year) Profit 1 2 3 4 206.10840 260.51788 338.06707 404.54111 5 10 15 20 505.68780 916.03505 1220.4939 1446.0516 Figure 1. A potential profit of the fisheries of a 3-population system in million Euro. Figure 2. The 3-population system: Cod. Development of the wise constant control (right). population (left), piecewise continuous control (middle), piece-  D. STUKALIN ET AL. 864 Frt of the population (left), piecewise continuous control (middle), pi igue 3. The 3-populationen-system: Herring. Developmen ecewise constant control (right). Figure 4. The 3-populationen-system: Sprat. Development of the population (left), piecewise continuous control (middle), piecewise constant control (right). 12. Comments The value function is globally continuously differentiable only inonal cases (for example, in n operate even if the value function is only piecewise differentiable. This happens when the set of the points of discontinuity of is composed of smooth surfaces. Useful general principles that guarantee a -solution of the HJB equation are not known. In generl, the value function is not smooth. Even if the value function is smooth, then the solution can be not expressed in explicit formulas [13]. There is a possibility of introducing a generalized so- lution concept, which is also obtained in the case of non-differentiability of a value function. ,Vtx excepti the linear-quadratic problems). The Bellman principle ca V 1 C a This solution concept should be so general that it can also be applied when the derivative Dv x does not exist for all n x R. On the oth 2003. er haould be ken so that onee does not get too many possible solu- tions of the HJB quation - in the ideal case, the optimal value function is the unique solution [14,15]. This gener- alized solution is called a viscosity solution. 11. References [1] M. Begon and M. Mortimer, “Populationsökolog New York, 1956. [3] M. Papageorgiou,“Optimierung,” R. Oldenbourg Verlag, München, 1996. [4] L. Grüne, “Modeling with Differential Equations,” Lec- ture Notes, University of Bayreuth, 2003. [5] T. Christiaans, “Neoklassische Wachstumstheorie,” Books on Demand, Norderstedt, 2004. [6] M. Brokate, “Control Theory,” Institute of Informatics and Mathematics, Technical University of Munich, Mu- nich, 1994. [7] A. Pantelejew and A. Bortakovskij, “Control Theory Examples and Practices,” Vysshaya Shkola, Moscow, [8] W. H. Schmidt, “Durch Integralgleichungen Beschrie- bene Optimale Prozesse mit Nebenbedingungen in Bana- chräumen-Notwendige Optimalit ätsbedingungen,” Journal of Applied Mathematics and Mechanics, Vol. 62, No. 2, 1982, pp. 65-75. doi: 10.1002/zamm.19820620202 nd, it sh ta ie,” Spe- ktrum Akademischer Verlag, Heidelberg, 1997. [2] A. J. Lotka,“Elements of Mathematical Biology,” Dover, in [9] M. Gerdts, “Optimal Control of Ordinary-Differential Copyright © 2011 SciRes. AM 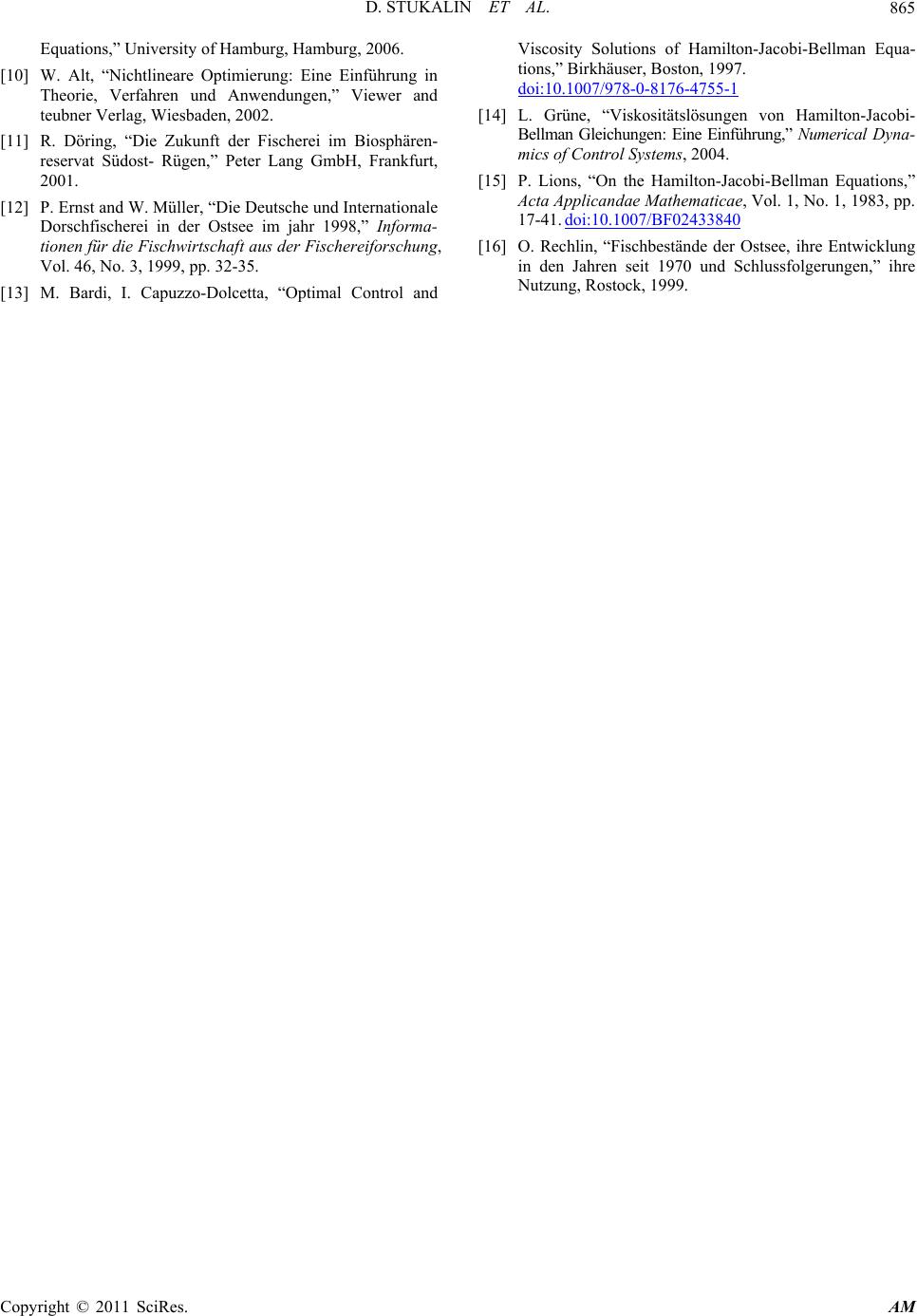 D. STUKALIN ET AL. 865 Equations,” University of Hamburg, Hamburg, 2006. [10] W. Alt, “Nichtlineare Optimierung: Eine Einführung in Theorie, Verfahren und Anwendungen,” Viewer and teubner Verlag, Wiesbaden, 2002. [11] R. Döring, “Die Zukunft der Fischerei im Biosphären- reservat Südost- Rügen,” Peter Lang GmbH, Frankfurt, 2001. [12] P. Ernst and W. Müller, “Die Deutsche und Internationale Dorschfischerei in der Ostsee im jahr 1998,” Informa- tionen für die Fischwirtschaft aus der Fischereiforschung, Vol. 46, No. 3, 1999, pp. 32-35. [13] M. Bardi, I. Capuzzo-Dolcetta, “Optimal Control and Viscosity Solutions of Hamilton-Jacobi-Bellman Equa- tions,” Birkhäuser, Boston, 1997. doi:10.1007/978-0-8176-4755-1 [14] L. Grüne, “Viskositätslösungen von Hamilton-Jacobi- Bellman Gleichungen: Eine Einführung,” Numerical Dyna- mics of Control Systems, 2004. [15] P. Lions, “On the Hamilton-Jacobi-Bellman Equations,” Acta Applicandae Mathematicae, Vol. 1, No. 1, 1983, pp. 17-41. doi:10.1007/BF02433840 [16] O. Rechlin, “Fischbestände der Ostsee, ihre Entwicklung in den Jahren seit 1970 und Schlussfolgerungen,” ihre Nutzung, Rostock, 1999. Copyright © 2011 SciRes. AM |