Vol.3, No.6, 419-425 (2011) Natural Science
http://dx.doi.org/10.4236/ns.2011.36057
Copyright © 2011 SciRes. OPEN ACCESS
CFD evaluation of thermal convection inside the DACON
convection sensor in actual space flight
Pradyumna Ghosh, Mihir Kumar Ghosh
Department of Mechanical Engineering Institute of Technology, Banaras Hindu University (BHU), Varanasi, India;
pradyumna_ghosh@rediffmail.com, mkghosh47@gmail.com
Received 2 February 2011; revised 15 March 2011; accepted 27 March 2011.
ABSTRACT
A CFD(Computational Fluid Dynamics) model
has been developed using the commercial CFD
package FLUENT for the thermal convection
inside air filled cylindrical DACON sensor,
where the onboard time dependent gravitational
micro acceleration has been considered. Time
dependent, curve fitted gravitational accelera-
tion in x- and y-axes from published data have
been incorporated in FLUENT through a User
Defined Function (UDF), developed in C which
includes space craft rotation. At the sensor
plane the two-dimensional flow has also been
visualized. A good agreement is between simu-
lation and published experimental data. Last but
not the least, for checking its response to suffi-
ciently strong perturbations in an orbital flight,
physical and numerical experiments are carried
out where an astronaut swung the sensor in
hands along the y axis with amplitude of 10cm
and a frequency of 0.2 Hz. A good qualitative
validation has been achieved between CFD and
actual experimental results.
Keywords: CFD (Computational Fluid Dynamics);
DACON sensor; Experimental Data; FLUENT; UDF
(User Defined Functions)
1. INTRODUCTION
Microgravity indicates low gravity, where the mean
gravitational acceleration is in the range of 10–1 - 10–5
m/s2. All on-board experiments in the automatic and
manned spacecraft experience residual micro-accelera-
tions or g-jitter. These micro-accelerations are most sig-
nificant in the frequency range 0 - 0.01 Hz. Internal nat-
ural convection is a phenomenon of natural convection
in an enclosure which has immense potential of engi-
neering application. In this connection, DACON con-
vection sensor has been developed to measure the re-
sponse of micro-acceleration in the buoyancy driven
thermal convection characteristics [1-5].
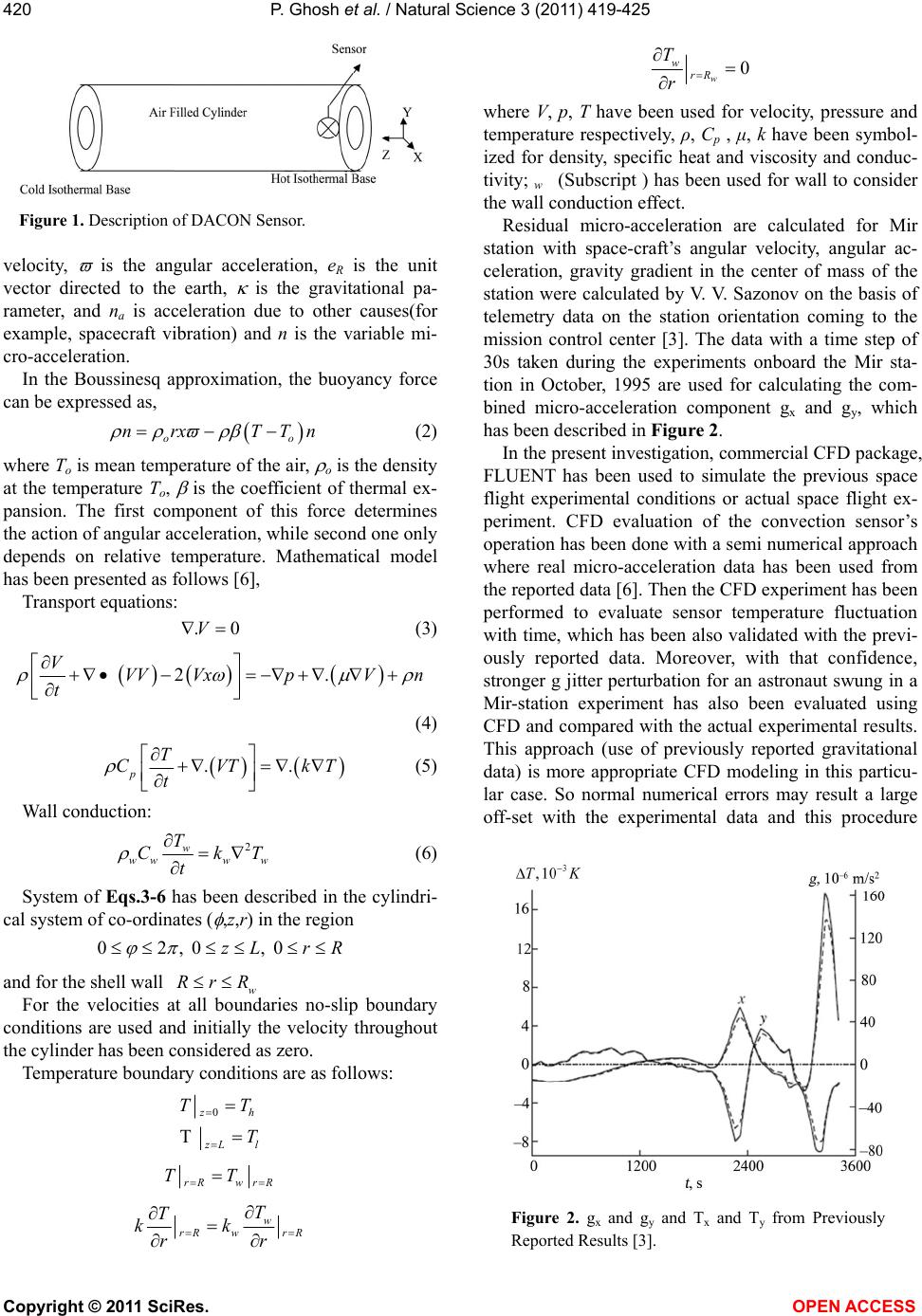
DACON convection sensor, shown in Figure 1, is an
air-filled cylindrical cavity of strictly controlled bound-
ary conditions for quick calculation of temperature field
under real space flight conditions (under on-board mi-
cro-acceleration). The wall thickness of the cylinder is
2.5 mm and the thermal conductivity of the wall material
is in the range of 0.16 - 2.3 W/m-K. The junctions of the
temperature sensors have been located 10 mm from the
hotter isothermal wall at a diameter of 45 mm, where the
entire cylindrical curved surface is adiabatic [6].
These two crossed differential temperature sensor
probes are placed in the cylindrical cavity in such a way
that their sensitivity axis are perpendicular to the cylin-
der axis, where as constant temperature difference was
maintained between the cylinder bases in actual space
flight situation. In satellites and orbital stations mi-
cro-gravity oscillation has been felt as a consequence of
spacecraft rotation, crew activity, different kind of vibra-
tion, non-uniformities of the earth’s gravitational field
etc. So far most of the studies have been concerned with
the convection under constant reduced gravity or har-
monic gravity vibration (g jitter). However the actual
behavior of fluid under orbital flight conditions is more
complicated. Indeed, the space craft rotation not only
contribute to the resultant vector micro-accelerations,
but also gives rise to additional forces which cannot be
reduced to some equivalent buoyancy forces.
In case of internal natural convection under sinusoidal
g-jitter streaming flow has been observed where pulsat-
ing wave from hot and cold side travels towards the cen-
tre and engages in constructive/destructive interface to
the formation of stationary wave [7].
The variable micro-acceleration due to rotation, angu-
lar acceleration and the gravity gradient can be ex-
pressed as [4-6],
3.
RR
nnaxrxw rxerer
(1)
where r is the radius vector of a point,
is its angular