Paper Menu >>
Journal Menu >>
 Applied Mathematics, 2011, 2, 666-675 doi:10.4236/am.2011.26088 Published Online June 2011 (http://www.SciRP.org/journal/am) Copyright © 2011 SciRes. AM Computation of Some Geometric Properties for New Nonlinear PDE Models Nassar Hassan Abdel-All1, Mohammed Abdullah Abdullah Hamad1, Mohammed Abdullah Abdel-Razek1, Amal Aboelwafa Khalil2 1Department of Mat hem at i cs, Faculty of Science, Assiut University, Assiut, Egypt 2Department of Mat hem at i cs, Faculty of Science, Sohag University, Sohag, Egypt E-mail: amalaboelwafay@yahoo.com Received March 16, 2011; revised March 25, 2011; accepted March 28, 2011 Abstract The purpose of the present work is to construct new geometrical models for motion of plane curve by Dar- boux transformations. We get nonlinear partial differential equations (PDE). We have obtained the exact so- lutions of the resulting equations using symmetry groups method. Also, the Gaussian and mean curvatures of Monge form of the soliton surfaces have been calculated and discussed. Keywords: Motion of Curve, Darboux Transformations, Gaussian and Mean Curvatures, Symmetry Groups 1. Introduction Kinematics of moving curves in two dimension is for- mulated in terms of intrinsic geometries. The velocity is assumed to be local in the sense that it is a functional of the curvature and its derivatives. Plane curves have received a great deal of attention from mathematics, physics, biology, dynamic system, image processing and computer vision [1,2]. Evolution of plane curve can be understand as a deformation of a plane curve in arbitrary direction according to arbitrary a mount in a conti- nuously process that has the time as a parameter. Phy- sically this arbitrary a mount is a function of velocity, so this process create a sequence of evolving planer curve moving by a funcion of velocity, the type of the motion (evolution) of this family of planer curves classified depend on our choice of velocity function. Let is the position vector of a curve C moving in space and let denote respectively the unit tangent, principal normal and binormal vectors vary along . If we introduce the darboux vector (see [3]), ,rst C ,,Tnb =Tk b (1) then the Serret-Frenet equations may be written as the following [4]: ==, == == s s s TTkn nnbk bbn where s is the arc length parameter along , the curvature and Ck the torsion. In the present moving curve context, the time t enters into the system (2) as a sparameter. The general temporal evolution in which the triad ,,bTn remains orthonormal adopts the form (darboux formula) [3] =, = = t t t Tnb nT bT b n (3) where is the geodesic curvature, is the normal curvature and is the geodesic torsion. Here, it is required that the arc length and time derivatives com- mute. This implies inextensibility of . Accordingly, the compatibility conditions C = s tts TT , = s t nn ts and = s t bts b, applied to the systems (2) and (3) yield =, = =. st s st k k k , (4) If the velocity vector =t r of a moving curve has the form C =Tnb, (5) then imposition of the condition yields stts rr = = sssss s ttnn bb nb. (6) ,T (2) Substitute about Serret-Frenet equations  N. H. ABDEL-ALL ET AL.667 =0, =, =. s s s k k (7) The temporal evolution of the curvature and the torsion k of the curve may now be expressed in terms of the components of velocity C , and by substitution of (7) into (4) to obtain =, =, ts s ts s kk k s (8) where 1 =. ss sk k (9) Motion in a plane occurs if =0 and =0 . Then Equation (8) becomes == tsss s kk kk. ss (10) From Equation (7), we have then Equation (10) becomes =dks 2 = tss s kkk d.ks (11) If we take then d=d =ksFkFk dFkk d=d= d s ks Fk= Fk ks k , hence the equa- tion (11) becomes 2 =. ss ts ss kk kFkkFkkFk kk (12) 2. Symmetry Group Now, we want to present the most general Lie group of point transformations, which apply on obtaining equa- tions Definition 1. We consider a scalar order PDE represented by m th Δ,=0, where is natural number m sk m (13) where =i s s, is a vector for which the components i =1,,ip s are independent variables and = j kk, is a vector cosest of =1,j,q j k dependent vari- ables, and = m m m k k s . The infinitesimal generator of the one-parameter Lie group of transformations for equa- tion (13) is =1 =, pi i i lXs k s 1= q , s k, k (14) where , i s k , , s k are the infinitesimals, and the th prolongation of the infinitesimal generator (14) is (see [5-8]) m = m lpr XX 1= j j q ,m sk , j k (15) where j l ,= m sk j D 1= i i p i k i . , 1= ij i pk (16) and is the total derivative operator defined by D k k k k s = , =, =1,, jj k kj s D i ijj j j p (17) A vector field X is an infinitesimal symmetry of the system of differential Equations (13) if and only if it satisfies the infinitesimal invariance condition =0 =0 m lpr X (18) 3. Soliton Geometry In this paper, we construct the soliton surfaces associated with the single soliton solutions (similarity solution) of the Equation (12). For this purpose, if =,kkst is a similarity solution of Equation (2), we have a solution surface given from the Monge patch ,kst=,fs,t. The tangent vectors s ft f, for the soliton surface are given by =1,0, , =0,1, . s tt s f k f k (19) The normal unit vector field on the tangents p T is given by =. f s f Nt s t f (20) f The and fundamental forms on 1st2nd are de- fined respectively by 22 1112 22 22 111222 =d,d=d2ddd , =d,d = d2ddd, I ff gsgstgt I IfNLsLstLt (21) where the tensor and are given by ij gij L 11 1222 11 1222 =,, =,, =,, =,, =,, =,. ss sttt ss sttt g ffgff gff LfNLfNLfN (22) The Gauss equations associated with are 12 1111 11 12 1212 12 12 2222 22 =, =, =, sss t sts t tts t f ffLN f ffLN f ffL N (23) Copyright © 2011 SciRes. AM  N. H. ABDEL-ALL ET AL. 668 while the Weingarten equations comprise 121222 1112 111112 122222 12121211 22 = =, , s s ts gLgLgL gL Nf gg gLgLgL gL Nf gg t t f f (24) where 22 11 2212 == st . g ff ggg (25) The functions i j in (23) are the usual Christoffel symbols given by the relations ,,, 1 =2 iil j jll jjl gg g g (26) The compatibility conditions ts = ss st f f and ts = st tt f f applied to the linear Gauss system (23) produce the nonlinear Mainardi-Codazzi system 222 1112 111222 221211 111 2212 111222 221211 2= 2= ts st LLL LL ggg gg LLL LL ggg gg 0, 0, (27) or, equivalently, 121 111211 121212112211 121 122211 221222122212 =, =, ts ts LL LLL LL LLL 2 2 (28) The Gaussian and mean curvatures at the regular points on the soliton surface are given by respectively 2 11 2212 12 2 11 2212 ===, LL L L Kkk g ggg g 0 (29) 11 2212122211 12 2 11 2212 2 11 == 22 LgLg Lg Hkk ggg . (30) where =det ij g g, =det ij LL k and 12 are the principal curvatures. The surface for which is called parabalic surface, but if 1 and 2 constant or 1constant and 2, we have surface semi round semi flat (cylinderial like surface).The integrability conditions for the systems (2) and (3) are equivalente to the Mainardi-Codazzi system of PDE (27). This give a geometric interpretation for the surface defined by the variables , kk K =0 =0 kk =0 = =k t s , to be a soliton surface [9,10]. 4. Applications 4.1. Case I: = F kk The Equation (12) becomes 3234 1=322= ts sssssss kkkkk kkkkk0. (31) The infinitesimal point symmetry of Equations (31) will be a vector field of the general form =X s tk (32) on 3 = M R; our task is to determine which particular coefficient functions , and are functions of the variables , s t and and will produce infinitesimal symmetries. In order to apply condition (18), we must compute the third order prolongation of which is the vector field k ,X 3 p r= J J , J X s tk k (33) whose coefficients, in view of (31), are given by the explicit formulae =, =, =, =. ssstssst ttststtt ss sss tssssst sss s sss tssssssst Dkkkk Dkkkk Dkkkk Dkkkk (34) The vector field X is an infinitesimal symmetry of the Equation (31) if and only if 332 1 2 234 pr= 0=333 32 682=0. ts sss ss ss sss s sss ss ss Xkkkkk kkkk k kkkk k (35) Substituting the prolongation Formulae (34), and equa- ting the coefficients of the independent derivative mono- mials to zero, leads to the infinitesimal determining equations which together with their differential conse- quences reduce to the system 11 =, =, ====0 22 tstk k st k . (36) The general solution of this system is readily found 31 323 11 =, =, = 22 cs cctcck , (37) where the coefficients i c are arbitrary constants. Therefore, Equation (31) admits the three-dimensional Lie algebra of infinitesimal symmetries, spanned by the three vector fields 123 11 =, =, = 22 XXXstk . s tstk (38) The combination of space and time translations 12 X X =ysct lead to a reduction of (31) to an ordinary differential equation (ODE) by the transformation and =kwy where c is the speed of the travelling wave. That is Copyright © 2011 SciRes. AM  N. H. ABDEL-ALL ET AL. Copyright © 2011 SciRes. AM 669 4 =0. 4.2. Case II: 1 =Fkk 233 322wwwwwcwwwww (39) Now, the solution of the Equation (39) is, 3 2 21 1d 2ln2 2 wyc wwcwcwc = 0, (40) In this case Equation (12), becomes 52 3 912= tssss sss kk kkkkkk 0, (45) where 12 and 3 are the integration constants, if we consider it equal zero, hence the solution of Equation (39) becomes ,cc cLie point symmetry for this equation is given by 12 34 =, =, 1 =,= 3 XX st Xs kXtk, s kt 22 2 2 22 == 11 cc wcy csct . (41) k (46) this solution is a similar solution to Equation (31), This solution is in the Monge form ==,wwy wst which define a regular surface as show in Figure 1 (). =1, 15, 0.12cs t The combination 12 == X XcX c s t gives rise to travelling wave solutions a wave speed . The vector field c X has invariants and which reduces (45) to the ODE =ysct=kw This surface is a soliton surface . From (29) and (30), one can see that the Gaussian and mean curvatures of the soliton surface ( ) are given by respectively 11 25 912wwwww cwww 3 =0. (47) 32 1 2 4 12 41363 =0, =, 32 ttss KH ts 2 (42) Now, solving the equation with the Lie symmetry spanned by 1 2 =, 2 =. 3 Yy Yy w y w (48) where 22 1 87246862 2 52324 424 246 2246 =12 =18366441 7 83783107 660708933 499157. ttss ttssssst s tsstss s tsstssss tsss (43) If we take the vector field we obtain solution 2 Y 2 3 =wy , and substituting in Equation (47) we get w 1 3 2 =9c and the solution 1 3 2 3 2 9 =c k s ct (49) The symmetry generator 3 11 =22 X st k s tk leads to invariants 2 =t y s and . These the in- =wsk variants transform Equation (31) to the following ODE, 3222 3 23 2324 23 83624 243616 4 21=0 '' ywwywyww w y wwywwyw yww ww (44) Remark 1. For regularity the parameters of the soliton surface must be satisfied s ct, i.e., for = s ct we have singularit y cuspidedge as shown in Figure 3. The Gaussian and mean curvatures respectively are (shown in Equation (50)) If we take the vector field 13 X X we here the in- riants and =yt1 =1 k The numerical solution of Equation (44) is shown in Figure 2 (intial condition and ). 1=1,1=2ww 1=3w w s , that is then =0w=w constant and 7 33 102 21111 32 23 3333333 =0, 270 6 = . 818 68 68124324381 K st H st ttstststsstsst (50)  N. H. ABDEL-ALL ET AL. 670 Figure 1. Soliton surfaces of (41). = 1 a k, s (51) thus we have Figure 4. The vector field leads to the invariants 4 X s y= and the tarnsformation 1 3 =ktw reduces (45) to an ODE in the form 62 27336= 0,wwwwwww 3 (52) this equation can be solved numericaly (intial condition and 0=2, 0=2ww 0=3w ) as shown in Fig- ure 5. 4.3. Case III: =2 1 Fk k In this case Equation (12) takes the form 62 34 22440 = tssss ssss kkkkkkkk kk 0, (53) Lie point symmetry of this equation is given by 123 =,=,=XX Xstk, s tst k (54) The combination 12 ==XcX Xc s t gives rise to travelling wave solutions with wave speed c. The vector field X has invariants and which reduces (53) to =ysct=wk 62 34 224 40=cwwwwww wwww solving Equation (55) hence 3 242 21 6d 241824 9 wyc wcwcwcw = 0, (56) If we take the integration constants to be zero hence the solution takes the form 22 22 == 88 wcy csct , (57) For regularity the parameters of the soliton surface must be satisfied 1 8 s ct c at 1, i.e., for =cc 1 =8 s ct c we have singularity (cuspidaledge) as shown in Figure 6. 0. (55) Figure 2. Numerical solution of (44). Copyright © 2011 SciRes. AM 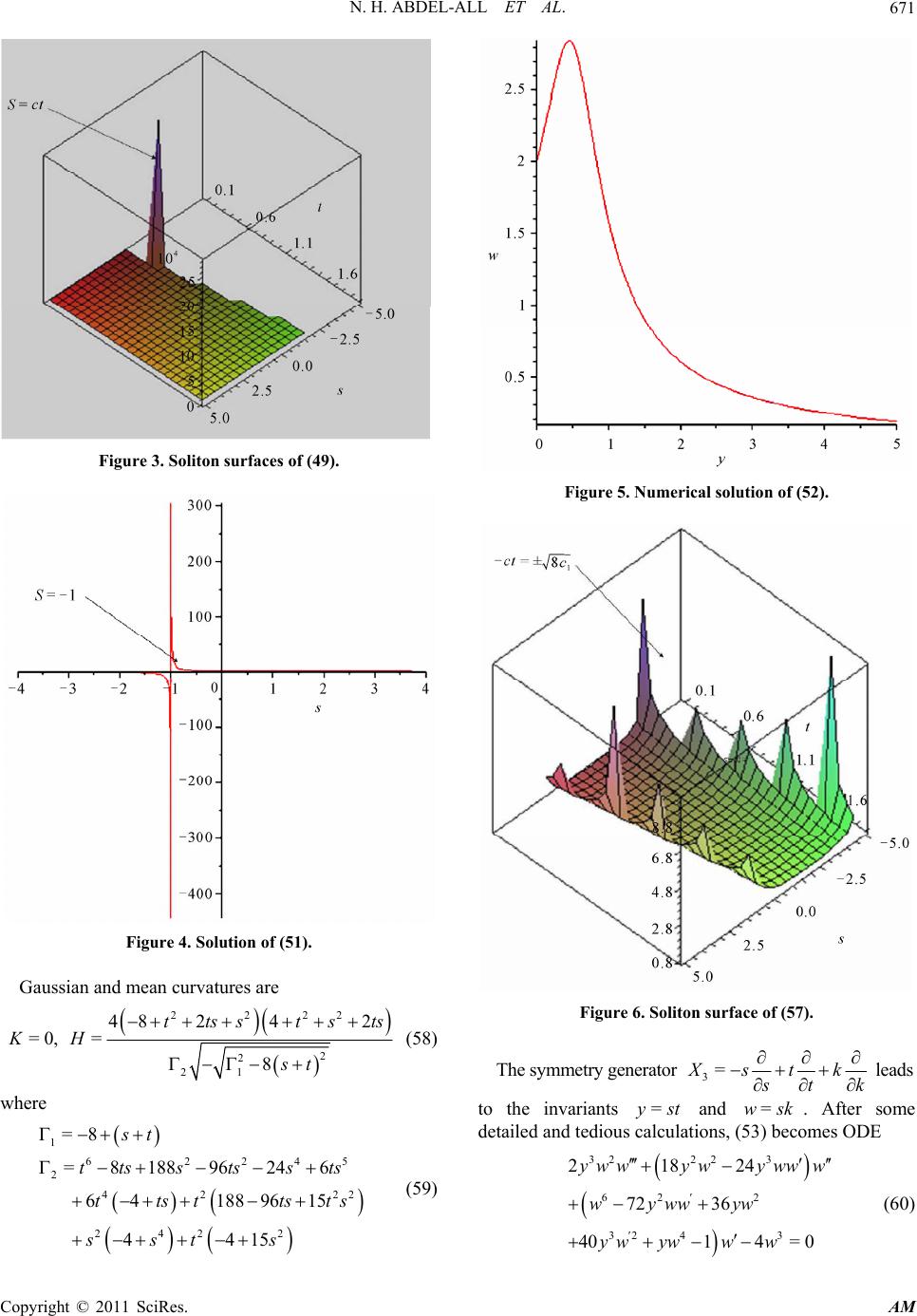 N. H. ABDEL-ALL ET AL.671 Figure 3. Soliton surfaces of (49). Figure 4. Solution of (51). Gaussian and mean curvatures are 2222 2 2 21 48 242 =0, = 8 ttss tsts KH st (58) where 1 6224 2 42 2422 =8 =818896246 641889615 4415 st tts s tssts ttst tsts sst s Figure 5. Numerical solution of (52). Figure 6. Soliton surface of (57). The symmetry generator 3= X stk s tk leads to the invariants and . After some detailed and tedious calculations, (53) becomes ODE =yst=wsk 3222 3 62 2 32 43 21824 72 36 4014= 0 ' ' ywwywyww w wywwyw yw yww w (60) 5 22 (59) Copyright © 2011 SciRes. AM 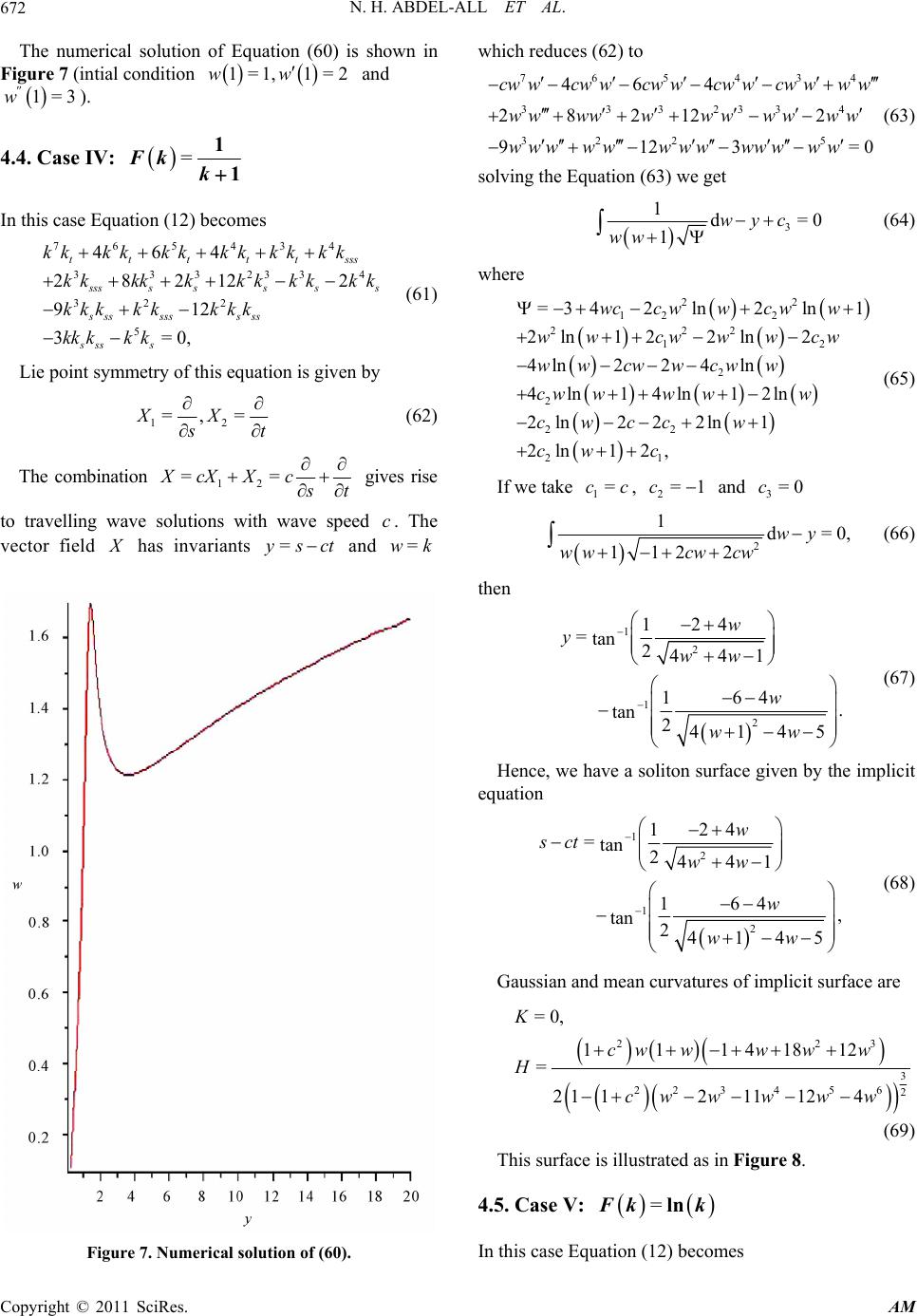 N. H. ABDEL-ALL ET AL. 672 The numerical solution of Equation (60) is shown in Figure 7 (intial condition and ). 1=1,1=2ww 1=3 '' w 4.4. Case IV: =1 1 Fk k In this case Equation (12) becomes 765434 333233 32 2 5 464 282122 912 3=0, tttt tsss 4 s sss ssss s ssssss ss sss s kkkkkkkk kkkk kkkkkkk kkkk kkk kkkkk kk kkk (61) Lie point symmetry of this equation is given by 12 =, =XX s t (62) The combination 12 ==XcX Xc s t gives rise to travelling wave solutions with wave speed c. The vector field X has invariants and =ysct=wk Figure 7. Numerical solution of (60). which reduces (62) to 765434 3332334 32 25 464 28212 2 9123 cwwcwwcwwcwwcwwww wwwwwww wwww www wwwwwwwwww=0 (63) solving the Equation (63) we get 3 1d 1wyc ww = 0 (64) where 22 12 2 222 12 2 2 22 21 =342 ln2ln1 2ln 122ln2 4ln22 4ln 4ln14ln 12ln 2ln2 22ln1 2ln1 2, wcc wwcww ww cwwwcw ww cwwcww cw wwww cwcc w cw c (65) If we take , 1=cc 2=1c and 3=0c 2 1d= 1122 wy wwcw cw 0, (66) then 1 2 1 2 124 =tan 2441 164 . tan 24145 w yww w ww (67) Hence, we have a soliton surface given by the implicit equation 1 2 1 2 124 =tan 2441 164 , tan 24145 w sct ww w ww (68) Gaussian and mean curvatures of implicit surface are 22 3 22 3456 2 =0, 11141812 = 21 1211124 K cw ww ww H cw www w 3 (69) This surface is illustrated as in Figure 8. 4.5. Case V: =ln F kk In this case Equation (12) becomes Copyright © 2011 SciRes. AM 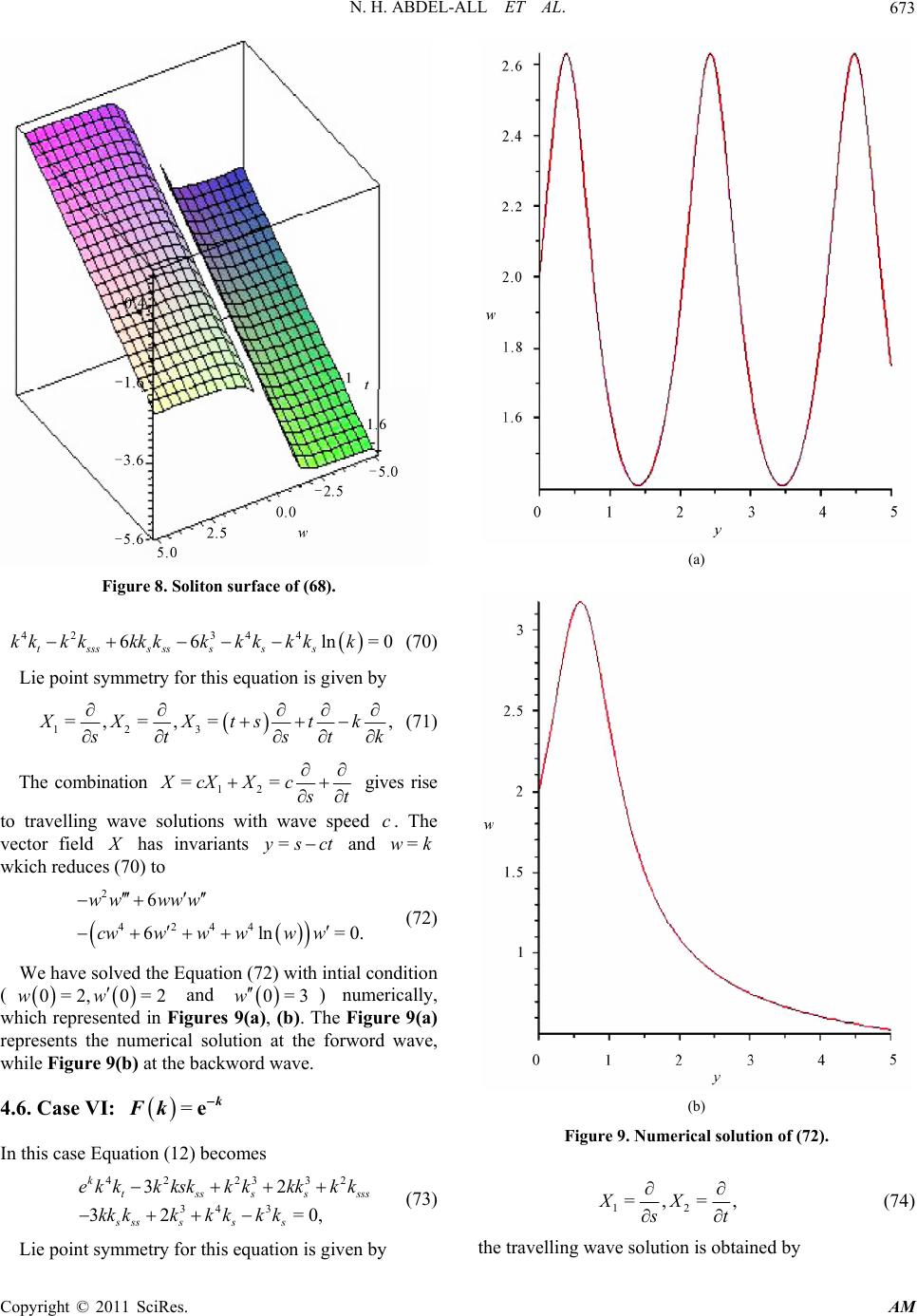 N. H. ABDEL-ALL ET AL.673 Figure 8. Soliton surface of (68). 4234 4 66 ln tssss sssss kk kkkkkkkkkkk =0 (70) Lie point symmetry for this equation is given by 123 =,=, =XX Xtstk, s tst k (71) The combination 12 ==XcX Xc s t gives rise to travelling wave solutions with wave speed c. The vector field X has invariants and wkich reduces (70) to =ysct=wk 2 4244 6 6ln ww www cwwwww w =0. (72) We have solved the Equation (72) with intial condition ( and ) numerically, which represented in Figures 9(a), (b). The Figure 9(a) represents the numerical solution at the forword wave, while Figure 9(b) at the backword wave. 0=2, 0=2ww 0=3w 4.6. Case VI: =ek Fk In this case Equation (12) becomes 42 2332 343 32 32 =0, ktss sssss sss sss ekkkkskkkkk kk kk kkkkkk (73) Lie point symmetry for this equation is given by (a) (b) Figure 9. Numerical solution of (72). 12 =, =XX, s t (74) the travelling wave solution is obtained by Copyright © 2011 SciRes. AM 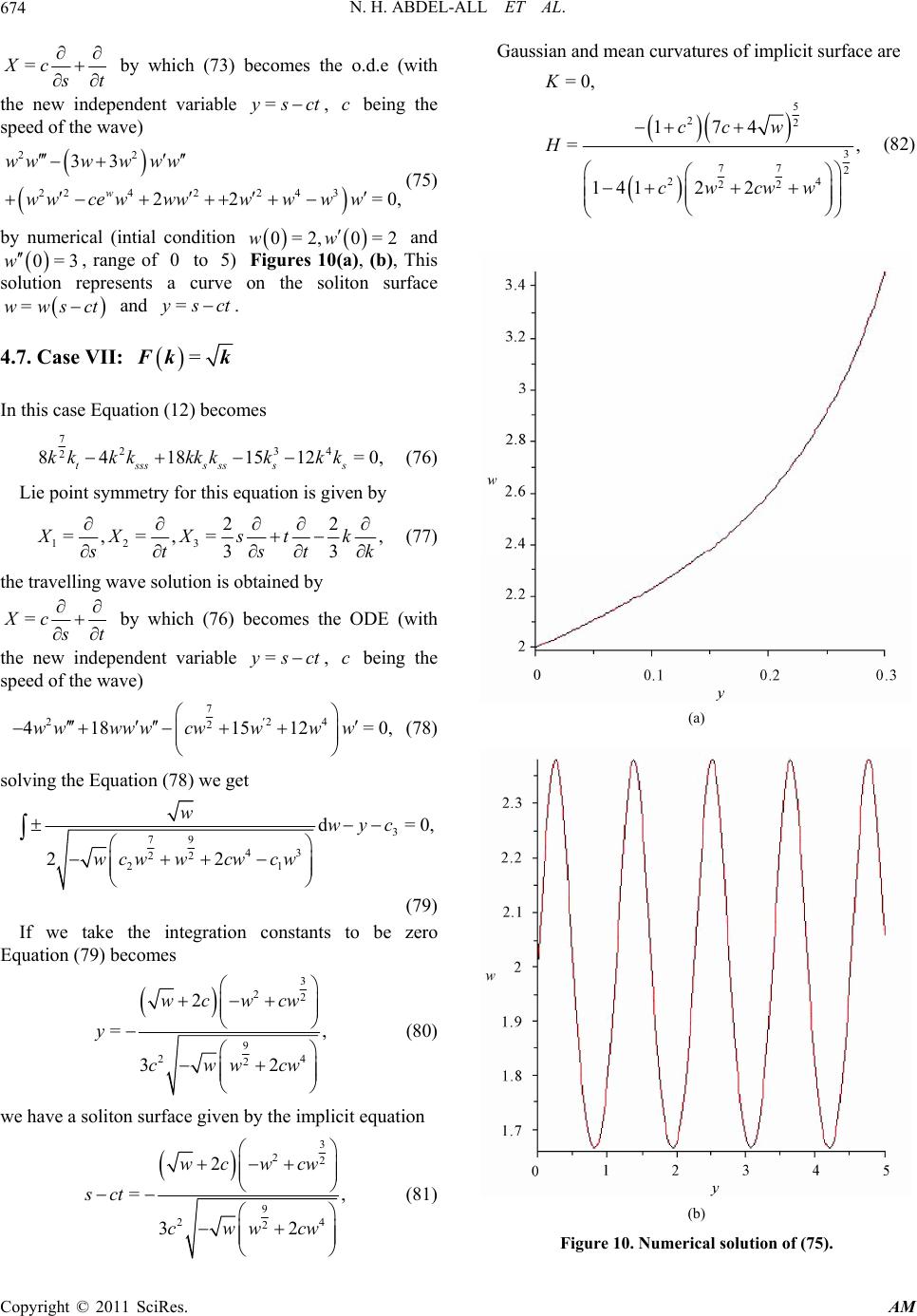 N. H. ABDEL-ALL ET AL. 674 =Xc s t by which (73) becomes the o.d.e (with the new independent variable , being the speed of the wave) =ysctc 22 22422 4 3 33 22 = w wwww ww wwcewwwwww w 0, (75) by numerical (intial condition and , range of to 5) Figures 10(a), (b), This solution represents a curve on the soliton surface and . 0=2, 0=2ww 0=3w =wws 0 = ct ysct 4.7. Case VII: = F kk In this case Equation (12) becomes 7 23 2 84181512= 0, tssss ssss kk kkkkkkkk 4 (76) Lie point symmetry for this equation is given by 123 22 =,=, = 33 XXXstk, s tst k (77) the travelling wave solution is obtained by =Xc s t by which (76) becomes the ODE (with the new independent variable , being the speed of the wave) =ysctc 7 22 2 418 1512= ' wwwwwcwww w 4 0, (78) solving the Equation (78) we get 3 79 43 22 21 d= 22 wwyc wcwwcwcw 0, (79) If we take the integration constants to be zero Equation (79) becomes 3 22 9 24 2 2 =, 32 wcwcw y cwwcw (80) we have a soliton surface given by the implicit equation 3 22 9 24 2 2 =, 32 wcwcw sct cwwcw (81) Gaussian and mean curvatures of implicit surface are 5 22 3 77 =0, 174 =, K cc w H 2 24 22 14 12 2cwcww (82) (a) (b) Figure 10. Numerical solution of (75). Copyright © 2011 SciRes. AM 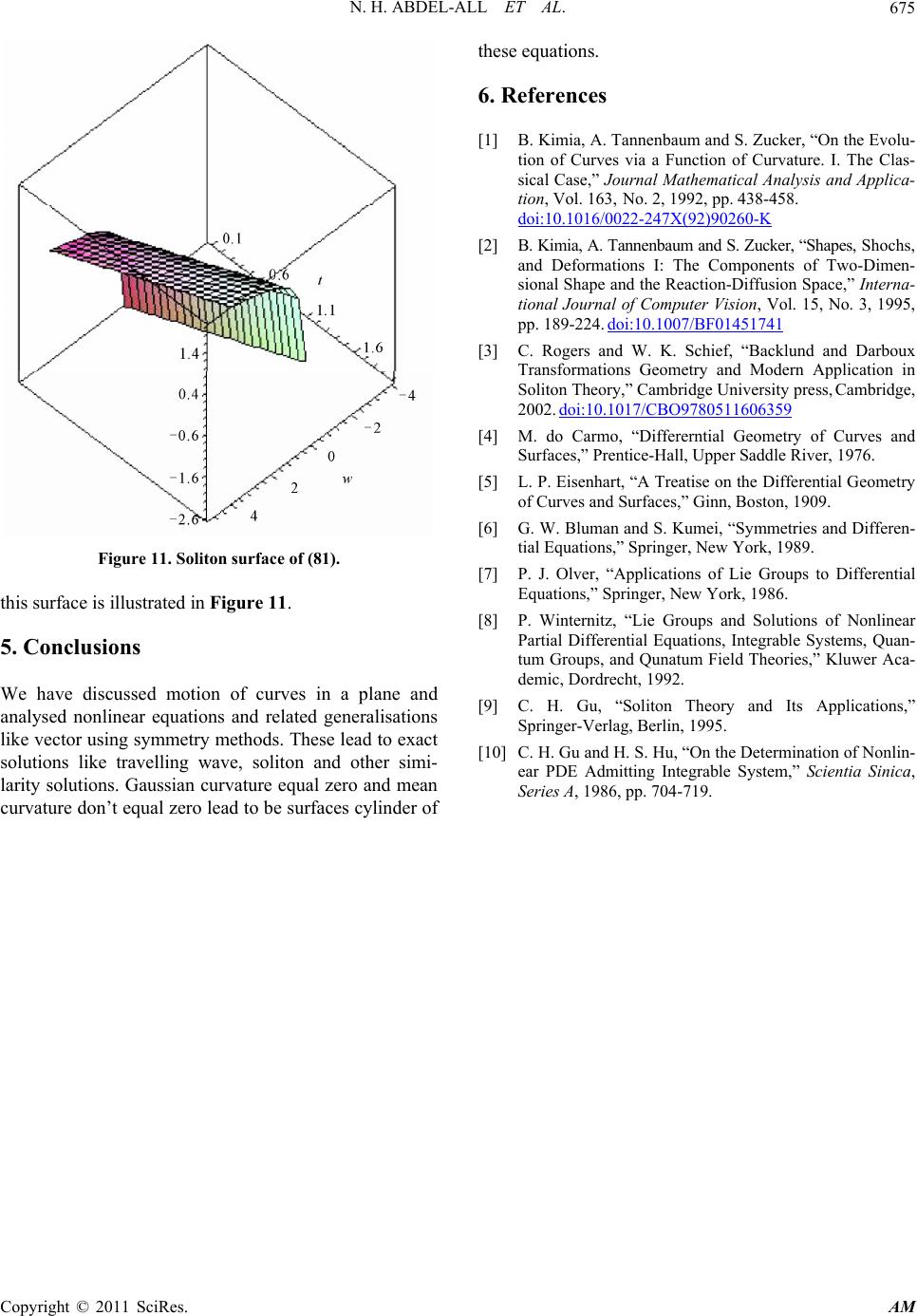 N. H. ABDEL-ALL ET AL. Copyright © 2011 SciRes. AM 675 Figure 11. Soliton surface of (81). this surface is illustrated in Figure 11. 5. Conclusions We have discussed motion of curves in a plane and analysed nonlinear equations and related generalisations like vector using symmetry methods. These lead to exact solutions like travelling wave, soliton and other simi- larity solutions. Gaussian curvature equal zero and mean curvature don’t equal zero lead to be surfaces cylinder of [1] B. Kimia, A. Tannenbaum and S. Zucker, “On the Evolu- tion of Curves via a Function of Curvature. I. The Clas- sical Case,” Journal Mathematical Analysis and Applica- tion, Vol. 163, No. 2, 1992, pp. 438-458. doi:10.1016/0022-247X(92)90260-K these equations. 6. References [2] B. Kimia, A. Tannenbaum and S. Zucker, “Shapes, Shochs, and Deformations I: The Components of Two-Dimen- sional Shape and the Reaction-Diffusion Space,” Interna- tional Journal of Computer Vision, Vol. 15, No. 3, 1995, pp. 189-224. doi:10.1007/BF01451741 [3] C. Rogers and W. K. Schief, “Backlund and Darboux Transformations Geometry and Modern Application in Soliton Theory,” Cambridge University press, Cambridge, 2002. doi:10.1017/CBO9780511606359 [4] M. do Carmo, “Differerntial Geometry of Curves and Surfaces,” Prentice-Hall, Upper Saddle River, 1976. [5] L. P. Eisenhart, “A Treatise on the Differential Geometry of Curves and Surfaces,” Ginn, Boston, 1909. [6] G. W. Bluman and S. Kumei, “Symmetries and Differen- tial Equations,” Springer, New York, 1989. [7] P. J. Olver, “Applications of Lie Groups to Differential Equations,” Springer, New York, 1986. [8] P. Winternitz, “Lie Groups and Solutions of Nonlinear Partial Differential Equations, Integrable Systems, Quan- tum Groups, and Qunatum Field Theories,” Kluwer Aca- demic, Dordrecht, 1992. [9] C. H. Gu, “Soliton Theory and Its Applications,” Springer-Verlag, Berlin, 1995. [10] C. H. Gu and H. S. Hu, “On the Determination of Nonlin- ear PDE Admitting Integrable System,” Scientia Sinica, Series A, 1986, pp. 704-719. |