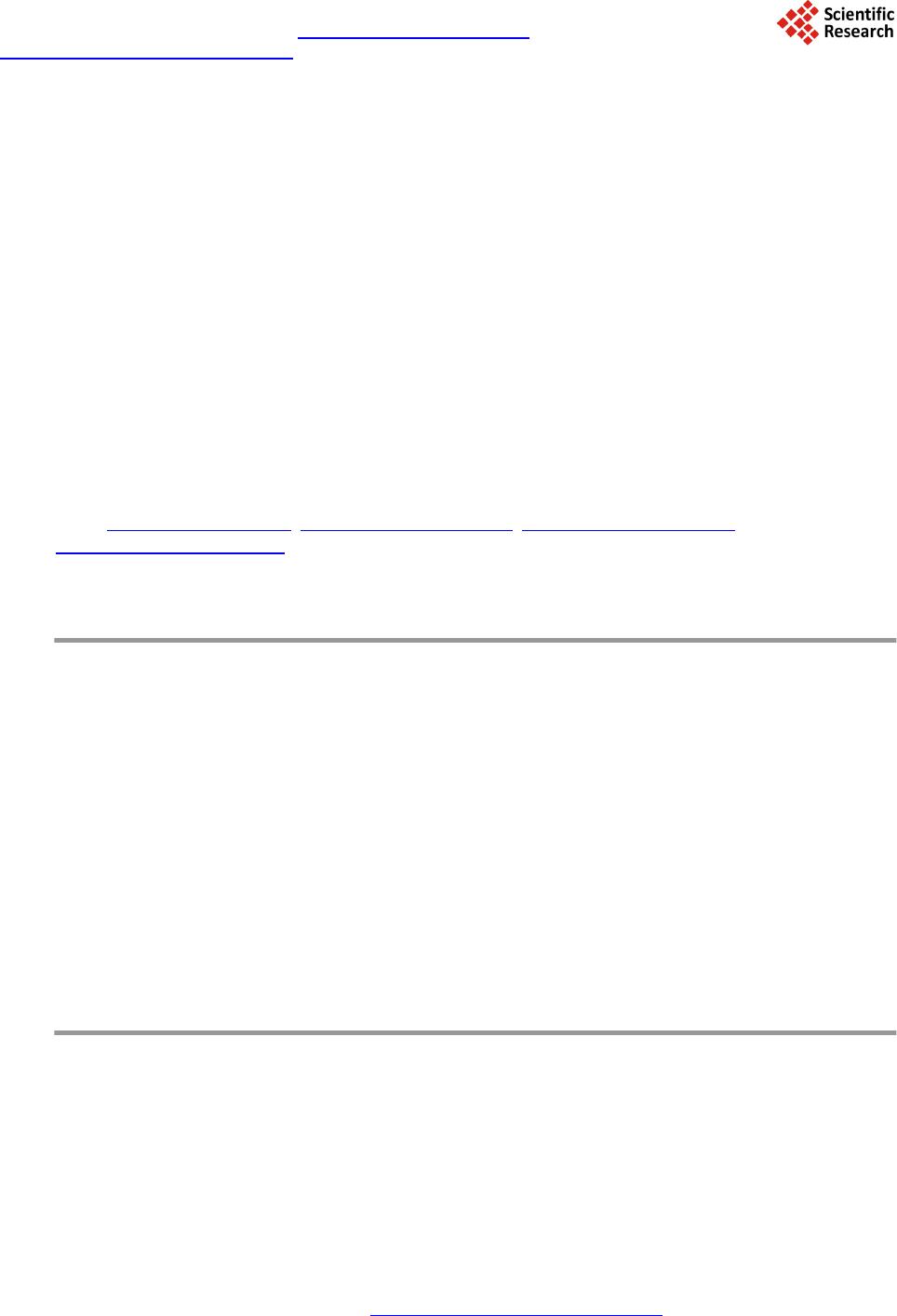
 Journal of Geoscience and Environment Protection, 2014, 2, 41-51 Published Online December 2014 in SciRes. http://www.scirp.org/journal/gep http://dx.doi.org/10.4236/gep.2014.25007 How to cite this paper: Datta, B., Prakash, O., Cassou, P., & Valetaud, M. (2014). Optimal Unknown Pollution Source Cha- racterization in a Contaminated Groundwater Aquifer—Evaluation of a Developed Dedicated Software Tool. Journal of Geo- science and Environment Protection, 2, 41-51. http://dx.doi.org/10.4236/gep.2014.25007 Optimal Unknown Pollution Source Characterization in a Contaminated Groundwater Aquifer—Evaluation of a Developed Dedicated Software Tool Bithin Datta1, Om Prakash1, Pauline Cassou2, Mathieu Valetaud2 1Discipline of Civil and Environmental Engineering, School of Engineering and Physical Sciences, James Cook University, Townsville QLD 4811, AUSTRALIA & CRC for Contamination Assessment and Remediation of the Environment, Mawson Lakes SA 5095, Au stralia 2École Nationale Supérieure d’Ingénieurs de Limoges (ENSIL), Université de Limoges, 87068, Limoges, Fran ce Email: bithin.datta@jcu.edu.au, om.prakash@my.jcu.edu.au, cassou.pauline@laposte.net, mathieu.val etaud@gma il.com Received Sep te mber 20 14 Abstract Precise identification of the pollutant source characteristics is the first step for designing an effec- tive groundwater contamination remediation strategy. In this study a linked simulation-opti mi- zation based methodology is utilized for identification of unknown groundwater pollution sources in a real life contaminated aquifer in New South Wales, Australia where the source locations and source flux release history are the explicit unknown variables. The methodology is applied utiliz- ing an in house software package GWSID developed at James Cook University for optimal deter- mination of the unknown source characteristics. The methodology incorporates linked simulation optimization approach and utilizes simulated Algorithm as an evolutionary optimization algo- rithm. The performance evaluation results show practical utility of the methodology and of the associated developed computers software in identifying the unknown source characteristics. Keywords Groundwater Contamination, Source Characterizatio n, Linked Simulation-O pti mization 1. Introduction Designing an effective remediation strategy for reclaiming a polluted aquifer requires precise information of the source characteristics in terms of magnitude, location, activity initiation time and activity duration. At the time of first detection of pollutants in a groundwater aquifer, very little is known about these pollution source charac- teristics. The identification of unknown pollution sources is non-linear (Mahar & Datta, 2000), ill-posed inverse problem (Yeh, 1986) and often have non unique solutions.  B. Datta et al. The problem of unknown groundwater source identification has often been solved as an optimization problem. Some of the initial contributions in identification of unknown groundwater pollution sources proposed the use of linear optimization model based on linear response matrix approach (Gorelick et al., 1983) and statistical pattern recognition (Datta et al., 1989). Some of the important contributions to solve the unknown groundwater pollu- tion sources identification problem include: non-linear maximum likelihood estimation based inverse models to determine optimal estimates of the unknown model parameters and source characteristics (Wagner, 1992); minimum relative entropy, a gradient based optimization for solving source identification problems (Woodbury et al., 1998); embedded nonlinear optimization technique for source identification (Mahar and Datta, 1997, 2000, 2001); inverse procedures based on correlation coefficient optimization (Sidauruk et al., 1997); Genetic Algo- rithm (GA) based approach (Aral et al., 2001; Singh & Datta, 2006); Artificial Neural Network (ANN) approach (Singh & Datta, 2004, 2007; Singh et al., 2004); constrained robust least square approach (Sun et al., 2006); classical optimization based approach (Datta et al., 2009a, b, 2011); inverse particle tracking approach (Bagt- zoglou, 2003; Ababou et al., 2010); heuristic harmony search for source identification (Ayvaz, 2010); Simulated Annealing (SA) as optimization for source identification (Jha & Datta, 2011; Prakash & Datta, 2012, 2013, 2014a, b). A review of different optimization techniques for solving source identification problem is presented in Chadalavada et al. (2011) and Amirabdollahian and Datta (2013). An extensive overview of various stochas- tic and deterministic approaches for solving groundwater pollution problem can be found in Atmadja and Bagt- zoglou (2001). In this study a linked simulation-optimization based approach is used for solving the groundwater pollution source identification problem. The optimization problem minimizes the residue between the observed concen- trations measurements and simulated concentration measurements at monitoring well locations. Simulated An- nealing (SA) is used as the optimization algorithm to solve the source identification problem. Determination of the source flux release history is the direct outcome of this methodology applied using a developed software package, CARE-GWSID (Datta et al., 2013a, b). The software package provides ease of ap- plicability in complex real life cases and portability of the methodology to multiple scenarios of unknown groundwater pollution source identification. Performance of the developed methodology incorporated in the software is demonstrated by solving a problem of unknown groundwater pollution source identification in a small city in New South Wales, Australia where possible leakage potentially from a petroleum tank have conta- minated the local aquifer. 2. Methodology The optimal source identification methodology incorporates the source flux release history as explicit unknown decision variable in the optimization model. SA is used for solving the optimization problem with an objective of minimizing the difference between the simulated and measured pollutant concentrations at the observed loca- tions. The unknown source flux release history of the sources is obtained as direct solutions of the source identi- fication model incorporated in a computer code CARE-GWSID (Datta et al., 2013a). 2.1. Linked Simulation-Optimization Model Source identification in terms of reconstructing the source flux release history of an unknown pollution source is often solved using a linked simulation-optimization approach. Linked simulation optimization model simulates the physical process of flow and solute transport within the optimization model. The flow and solute transport simulation models are treated as important binding constraint for the optimization model. Therefore any feasible solution of the optimization model needs to satisfy the flow and the transport simulation model. The advantage of this approach is that it is possible to link any complex numerical model to the optimization model. In this methodology, the flow and transport simulation models are linked to the optimization model using the SA algo- rithm for solution. 2.2. Groundwater Flow Simulation Model A three-dimensional numerical model MODFLOW (Harbaugh et al., 2000) is used to simulate the groundwater flow in the polluted aquifer. MODFLOW is a computer program that numerically solves the three-dimensional groundwater flow equation for a porous medium by using a finite-difference method. The partial differential  B. Datta et al. equation for groundwater flow (Rushton and Redshaw, 1979) is given by Equation (1): xxyy zzs hh hh KKK WS x xyyz zt ∂∂∂∂∂ ∂∂ ++ ±= ∂∂∂∂∂ ∂∂ (1) where Kxx, Kyy and Kzz represent the values of hydraulic conductivity along the x, y and z coordinate axes (LT−1) h is the potentiometric head (L) W is the volumetric flux per unit volume representing sources and/or sinks (T−1) Ss is the specific storage of the porous material (L−1) t is time (T) x, y and z are the Cartesian co-ordinates (L) 2.3. Solute Transport Model in Groundwater System A thr ee -dimensional modular pollutant transport numerical model MT3DMS (Zheng and Wang, 1999) is used to simulate the solute transport in the polluted aquifer system. The transport model (MT3DMS) utilizes the flow field generated by the flow model (MODFLOW) to compute the pollutant plume. The partial differential equa- tion describing three-dimensional transport of pollutants in groundwater (Domenico and Schwartz, 1998) is given by Equation (2): 1 () N s ijis k k i ji q CC DvC C R txx x θ = ∂∂ ∂∂ =− ++ ∂∂∂ ∂ ∑ (2) where C is the concentration of pollutants dissolved in groundwater (ML−3) t is time (T) xi is the distance along the respective Cartesian coordinate axis (L) Dij is the hydrodynamic dispersion coefficient tensor (L2T−1) vi is the seepage or linear pore water velocity (LT−1); it is related to the specific discharge or Darcy flux through the relationship, vi = qi/θ qs is volumetric flux of water per unit volume of aquifer representing fluid sources (positive) and sinks (nega- tive) (T−1) Cs is the concentration of the sources or sinks (ML−3) θ is the porosity of the porous medium (dimension less) Rk is chemical reaction term for each of the N species considered (ML−3T−1) 2.4. Optimization Model SA is used as optimization algorithm to solve the optimization problem. SA, first introduced by Kirkpatrick et al. (1983), is an extension of the Metropolis Algorithm (Metropolis et al., 1953). The basic concept of SA is de- rived from thermodynamics. Each step of SA algorithm replaces the current solution by a random nearby solu- tion, chosen with a probability that depends on the difference between the corresponding function values and algorithm control parameters (initial temperature, temperature reduction factor etc.). In this study, SIMANN a FORTRAN public domain code for SA developed by Goffe (1996) is utilized for the solution algorithm. 2.5. Optimal Source Identification Model In source identification problem where the starting time of the activity of the sources is known, temporal pollu- tant source fluxes from all the potential sources, represented by the term qsCs in the transport equation (2) are the only explicit decision variables. Source flux identification using linked simulation-optimization is solved by mi- nimizing the difference between the simulated pollutant concentration measurements and the observed pollutant concentration measurements in space and time. The solution strategy is to generate candidate values of these unknown variables within the optimizations algorithm, use these values for forward simulations of flow and transport models, compute the difference between simulated and observed pollutant concentrations and finally obtain an optimal solution that minimizes the difference between observed and simulated value s. SA is used as 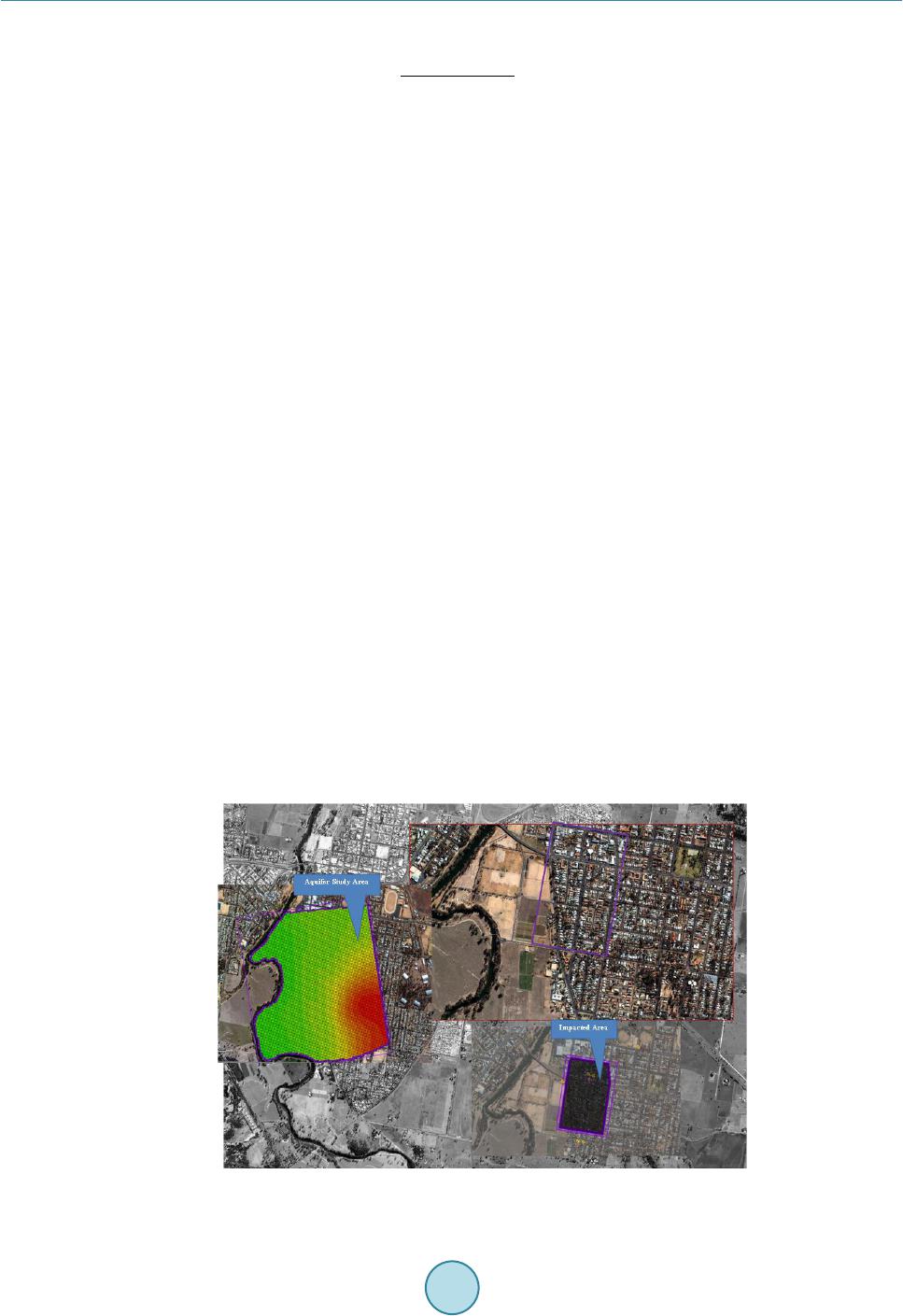 B. Datta et al. optimization algorithm to solve the optimization problem. 2 11 tt N NOBiob iob t t iobiob cest cobs Min cobs δ = = − + ∑∑ (3) Subject to: (4) f(qs,Cs,t) represents the simulated concentration obtained from the transport simulation model at an observa- tion location at time t and for a specific source flux qsCs. This set of constraint essentially represents the linking of the optimization algorithm with the numerical groundwater flow and transport simulation model through the decision variables. where cobstiob = observed concentration measurement at observation location iob at time t (ML−3) cesttiob = corresponding estimated concentration at observation location iob at time t (ML−3) NOB = total number of monitoring locations N = is the total number of monitoring time steps at location iob δ = is a constant specified Abs = is the absolute difference The objective function formulation shown by Equation (3) calculates the difference between the simulated pollutant concentration and observed pollutant concentration in the numerator. This difference is divided by the observed pollutant concentration plus a specified constant value δ. The reason for adding a small constant term is to avoid any indeterminate value when the observed pollutant concentration is zero. 3. Performance Evaluation Performance of the proposed methodology is evaluated for a polluted aquifer site in the Upper Macquarie Groundwater Management Area. Due to confidentiality requirements the exact location of the polluted aquifer site is not disclosed. In this study the actual polluted aquifer region is referred to as the “impacted area” and the total aquifer region considered (Prakash, 2014) in this study is called the “aquifer study area” (Figure 1). 3.1. Polluted Aquifer Site Description The study area measuring 2.1871 km by 2.4256 km (Prakash, 2014) is considered in this study such that all hy- drogeological conditions impacting the actual polluted aquifer region are accounted for in the model. The Mac- quarie River formed a natural boundary on the western side of the study area (Figure 1). The ground topography Figure 1. Plan view of the study area. 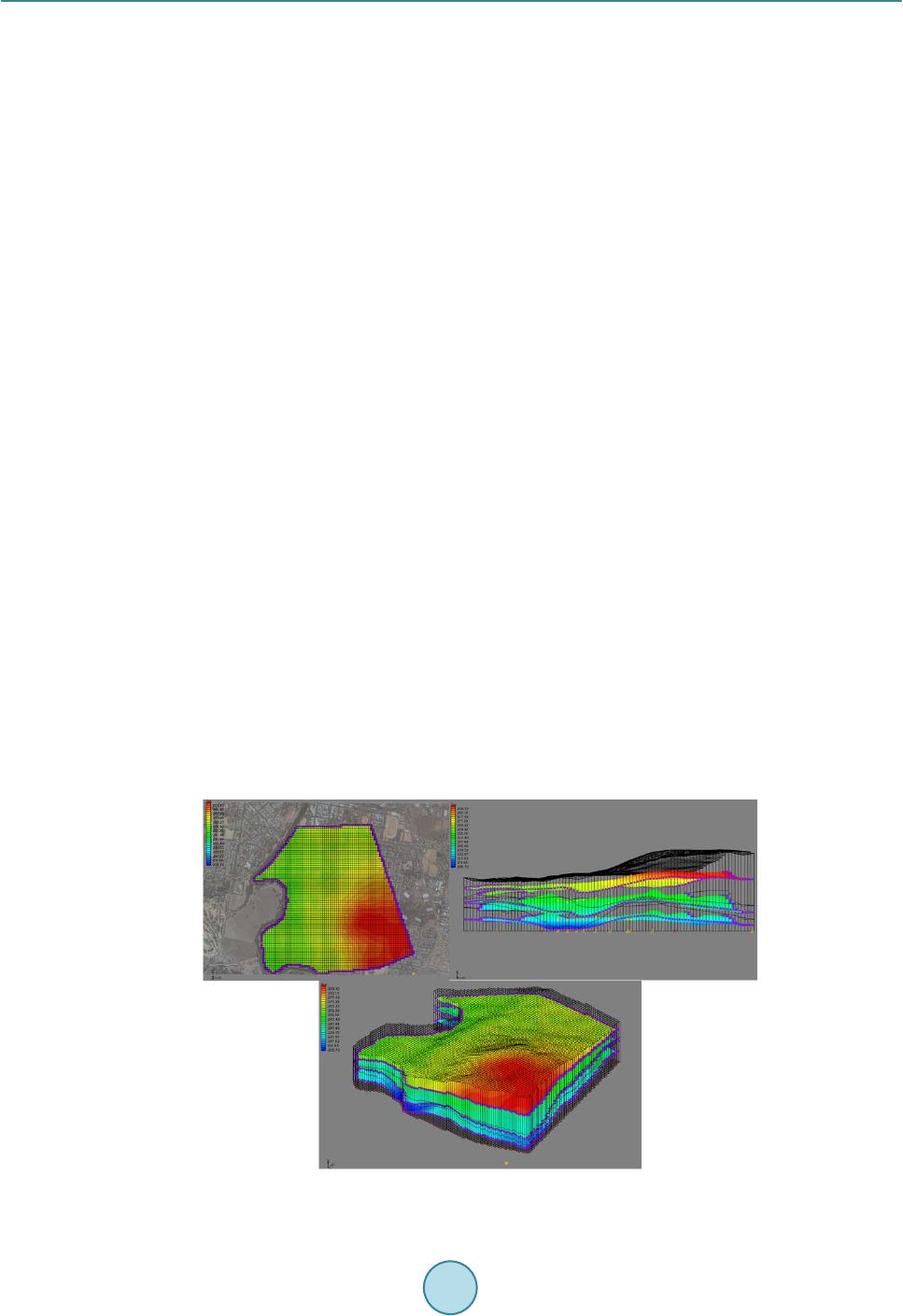 B. Datta et al. generally slopes from the south east towards the river in the west. The ground elevation in the study area ranges from 292 mAHD towards the river to 251 mAHD on the north-eastern side. The stratigraphy of the study area can be broadly divided into three distinct layers. The top layer is comprised of tertiary alluvium, the middle layer is comprised of quaternary alluvium and impervious bedrock forms the third layer. The thickness of these layers varies from one point to the other. The main sources of recharge to the aquifer are rainfall and recharge from the river. The region receives mod- erate to low rainfall with a long term average of 583 mm/year during the wet season, running from November until February. The Macquarie River is a major source of groundwater recharge in the aquifer study area. Ex- traction of groundwater in the study area is mainly through wells for the purpose of drinking water supply and agriculture. The pumping rate has varied over the years due to changes in the volumetric town water extraction limits from the groundwater system, and due to voluntary groundwater extraction limits in the year 2010 (Mars- den Jacob, 2011). 3.2. Groundwater Flow Modelling and Calibration The groundwater flow in the aquifer study area is modelled as an unconfined aquifer with specified head boun- daries on all sides (Figure 2). The western boundary, represented by the river, is a specific head boundary where the head at the boundary is given by the average stage in the river. A groundwater flow model of the entire Up- per Macquarie Groundwater Management Area was developed based on Puech (2010). Based on the information available from this report hydraulic heads at the other boundaries are estimated. Groundwater flow in the study area was modelled from 1 January, 1995 until 31 December, 2012. The entire study time horizon was divided into 18 stress periods of 1 year each. In the three dimensional simulation models, the study area is discretized into small grids of size 21.87m by 21.08 m in the x and y directions respectively, as shown in Figure 2. The size of the grid in the z direction va- ries to match with the layer thickness. The flow in the groundwater aquifer was simulated using the LPF pack- age option in GMS. The hydrogeological properties, such as hydraulic conductivity, porosity, specific storage and specific yield, were obtained from previous studies conducted on this study area by Puech (2010) and Jha and Datta (2012) and Prakash and Datta (2014c). These hydrogeological properties are listed in Table 1. The developed groundwater flow model was calibrated using hydraulic head measurement data from 31 ob- servation locations spread across the impacted area. The recorded hydraulic head data used for model calibration was recorded for the duration starting from October 2006 to July 2011, at discrete time intervals. Calibration targets were set to be within one meter intervals of the observed hydraulic head value with a confidence level of 90 percent. The model boundary conditions were manually adjusted to achieve the calibration targets. The addi- tion of some nodes on the boundary helped to improve the matching (Figure 3). The measured and simulated Figure 2. Isometric view of the discretized study area. 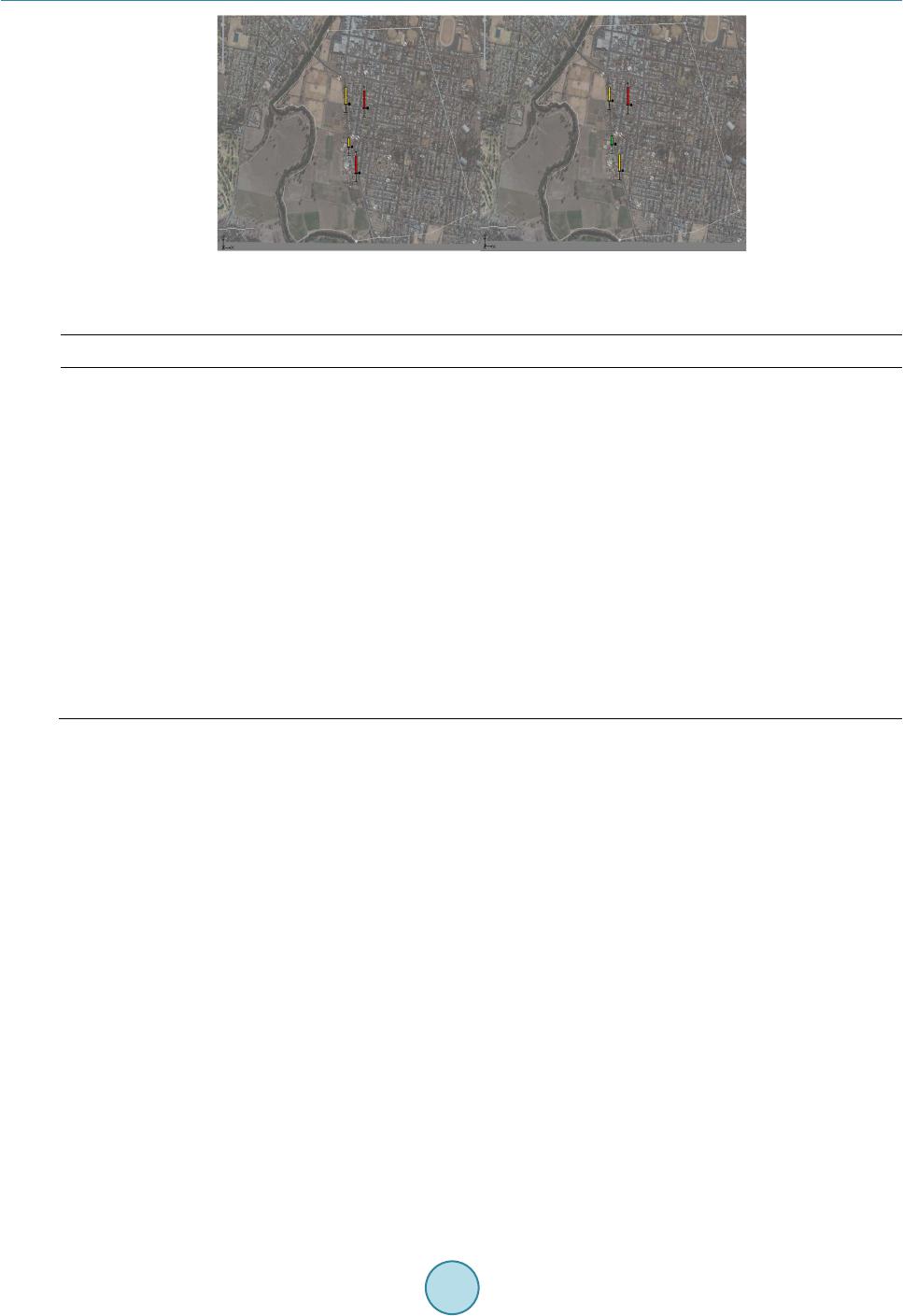 B. Datta et al. Figure 3. Model calibration results. Table 1. Hydrogeological properties used in flow modelling of the study area. Parameter Uni t Value Maximum length of study area Maximum width of study area Saturated thickness, b Number of layers in z-direction Grid spacing in x-direction, Δx Grid spacing in y-direction, Δy Grid spacing in z-direction, Δz Kxx (Layer 1, Layer 2, Layer 3) Kyy (All Layers) θ ( All Layers ) Longitudinal Dispersivity, αL Transverse Dispersivity, αT Horizontal Anisotropy Specific Yield Sy (All Layers) Specific Storage Ss (All Layers) Initial pollutant concentration m m m m m m m/d m/d m/d m/d g/l 2187.1 2425.6 Variable 3 21.87 21.08 Variable 12.37, 16.24, 0.001 0.2 0.27 12 6 1.5 0.1 0.000006 0.00 heads were compared at selected location. In Figure 3, the red bars show larger error whereas the green bars signify that calibration target is achieved. Yellow represents intermediate errors. This calibration was continued until satisfactory calibration results were obtained. Limited calibration was performed due to time constraints. These calibration results show that the groundwater flow model performs satisfactorily. Once the entire study area is modelled and calibrated the flow model for the actual impacted area is derived from the calibrated model. The GMS7.0 feature, Regional to Local, is used to interpolate the starting head and layer thickness values for the impacted area from the entire study area model. The grid sizes are refined further in the flow model for the impacted area. All of the boundaries are considered as time varying specified head boundary conditions. The value of the time varying specified heads at the boundary of the impacted area are extrapolated from the calibrated model for the entire study area. All of the other hydrogeological flow parame- ters are kept the same as in Table 1. 3.3. Pollutant Transport Simulation in the Impacted Area A three-dimensional transient transport simulation model was developed to study the fate and transport of the petrochemical pollutant BTEX originating from a specified point source. For the purpose of implementation, the pollutant is assumed to be conservative in nature and the pollutant plume boundary is assumed to be contained within the boundary of the impacted area. The transport model uses the flow field generated by the flow model to predict the movement of the pollutants in the impacted area of the aquifer over time. The initial concentration of BTEX in the aquifer at the start of the transport simulation is assumed to be zero. Once the groundwater flow model for the impacted area is developed, the next step is to identify the unknown  B. Datta et al. source characteristics of the pollutant. To evaluate the performance of the source identification methodology, the exact locations of the pollutant sources are assumed to be unknown, with two different possible locations. One of these needs to be identified as not an actual or dummy source. The two potential sources in the study area are shown in Figure 4. The points marked in yellow circles are the grid locations containing the potential sources, and the red dots are the observation wells where the concentration of BTEX is observed. 3.4. Source Flux Release History Identification and Performance Evaluation In the source flux release history identification, the simulation model starts from 1 January, 1995. The activity duration of the sources is assumed to be 10 years divided into 10 equal stress periods of 1 year each. The pollu- tant flux from the sources is assumed to be constant over a stress period. The pollutant flux from each of the sources is represented as S(i), where i represents the source stress period year. In this case S is the actual source and S’ is the dummy source. A total of twenty source fluxes (S1995, S1996, S1997, S1998, S1999, S2000, S2001, S2002, S2003, S2004, S'1995, S'1996, S'1997, S'1998, S'1999, S'2000, S'2001, S'2002, S'2003, S'2004) are considered as explicit unknown variables in the optimization problem. A total of 24 observation locations are present in the study area. Four temporal concentration measurements from six randomly chosen observation lo- cations are used for source flux release history identification. Since the actual source flux release history or the source activity initiation time are not known, the estimated source flux magnitudes cannot be validated. The performance of the methodology can only be evaluated in terms of how well the methodology is able to identify the dummy source. 3.5. Source Flux Release History Identification Using CARE -GWSID CAR E-GWSID is an in home built software package that is used for source identification. The CARE-GWSID software package (Datta et al., 2013) was developed in James Cook University, Australia in 2013 with a re- search funding provided by CRC-CARE. The software package provides a user friendly interface for solving unknown groundwater pollution source identification problem. The software essentially comprise of excel user interface for input data, backend VBA routines for generating the input file for simulation and optimization and FORTRAN executables for solving the source identification problem. SA is used as solution algorithm for solv- ing the optimization problem. The schematic structure of the software is shown in Figure 5. All the relevant details from the calibrated flow and transport model are input into the software package as shown in Figure 6. Four temporal concentration measurements from the six randomly chosen observation loca- tions along with their corresponding locations is input to the software. The optimization parameters are chosen and the source identification model is executed from the user interface. Once the source identification model has finished execution, the results are exported back to the user interface. Figure 4. Discretized plan view of the impacted aquifer area.  B. Datta et al. Figure 5. Schematic diagram of CARE-GWSID software. Figure 6. A typical data input screen of CARE-GWSID. 4. Results and Discussion The performance evaluation results of source identification, source flux release history and source activity initi- ation times using source identification model are presented in Figure 7. Each of the unknown source flux va- riables (S1995, S1996, S1997, S1998, S1999, S2000, S2001, S2002, S2003, S2004, S'1995, S'1996, S'1997,  B. Datta et al. S'1998, S'1999, S'2000, S'2001, S'2002, S'2003, S'2004) are marked on the x axis. The source flux magnitude in gram per second is shown on the y axis. The exact source location, source activity initiation time and the source activity duration is indirectly estimated based on the estimated source flux values. The source flux from the second source is estimated close to zero thus meaning there is no pollutant contribu- tion from this source. This confirms there is one source and it is the source 1(S), the other is a dummy source (S’). The results validate that the optimally identified source 1 location is indeed the actual source location i.e., the location of the gas station with leaking tank. Figure 7 shows the source flux estimates using four temporal concentration measurements from six arbitrary well locations. Figure 7 shows the source activity starts in 1995. The values of the estimated source fluxes are presented in Table 2. Estimated activity duration of the source is approximately 8 years, until 2002. These temporal fluxes are not constant, and could be due to different reasons. First, the pollutant infiltration in the soil and in the groundwater depends of some characteristics like rainfall, dry season, or modification of hydraulic head field by pumping wells. Second, it could be due to a new pollutant source contribution i.e., a new leak, a waste storage, etc. This second hypothesis may explain the 1998 spike but not the 2002 large value as there is no activity in 2003. Therefore we opt for the first explanation. 5. Conclusions This developed methodology along with the software incorporating the methodology for identification of the source fluxes appear to perform satisfactorily in estimating the unknown groundwater pollution source fluxes in a contaminated aquifer. The performance evaluation results show that the developed methodology is successful in estimating the source flux values in a real groundwater pollution scenario. The actual source locations, source activity starting times, and the source activity durations are obtained as the optimal solutions based on this me- thodology. The developed software package CARE-GWSID is effective in finding the solution results for unknown Figure 7. Source flux identification result. Table 2. Source flux ıdentification results. Year S (actual) g/s S’ (dummy) g/s 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 890 40 4 70 12 13 1 37 0 3 2 1 0 1 0 0 0 1 0 7  B. Datta et al. groundwater pollution source identification, and it can be easily applied to various other complex real life scena- rios of groundwater pollution. Acknowledgem ent s Authors would like to thank CRC-CARE, Australia and James Cook University, Australia for funding and sup- port of this research. References Ababou, R., Bagtzoglou, A. C., & Mallet, A. (2010). Anti-Diffusion and Source Identification with the RAW Scheme: A Particle-Based Censored Random Walk. Environmental Fluid Mechanics, 10, 41-76 http://dx.doi.org/10.1007/s10652-009-9153-4 Aral, M. M., Guan, J., & Maslia, M. L. (2001). Identification of Contaminant Source Location and Release History in Aqui- fers. Journal of Hydrologic Engineering, 6, 225-234. http://dx.doi.org/10.1061/(ASCE)1084-0699(2001)6:3(225) Atmadja, J., & Bagtzoglou, A. C. (2001). State of the Art Report on Mathematical Methods to Reliable of Groundwater Pol- lution Source Identification. Environmental Forensics, 2, 205-214. http://dx.doi.org/10.1006/enfo.2001.0055 Ayvaz, T. M. (2010). A Linked Simulation-Optimization Model for Solving the Unknown Groundwater Pollution Source Identification Problems. Journal of Contaminant Hydrology, 117, 46-59. http://dx.doi.org/10.1016/j.jconhyd.2010.06.004 Bagtzoglou, A. C. (2003). On the Non-Locality of Reversed Time Particle Tracking Methods. Environmental Forensics, 4, 215-225. http://dx.doi.org/10.1080/713848511 Chadalavada, S., Datta, B., & Naidu, R. (2011). Optimisation Approach for Pollution Source Identification in Groundwater: An Overview. International Journal of Environment and Waste Management, 8, 40-61. http://dx.doi.org/10.1504/IJEWM.2011.040964 Datta, B., Arachchige, R. R, Prakash, O., Amirabdollihan, M., Chadalavada, S., & Naidu, R. (2013a). Integrated Software for Characterizing Groundwater Pollution Sources in a polluted aquifer CARE-GWSI D—Software User Manual, James Cook University and CRC-CARE. Datta, B., Beegle, J. E., Kavvas, M. L., & Orlob, G. T. (1989). Development of an Expert-System Embedding Pattern- Recognition Techniques for Pollution Source Identification. Technical Report: PB-90 -185927/XAB, OSTI ID: 6855981. Davis, CA: Dept. of Civil Engineering, California Univ. Datta, B., Chakrabarty, D., & Dhar, A. (2009a). Optimal Dynamic Monitoring Network Design and Identification of Un- known Groundwater Pollution Sources. Water Resour. Manage., Springer, 23, 2031 -2049 . Datta, B., Chakrabarty, D., & Dhar, A. (2009b). Simultaneous Identification of Unknown Groundwater Pollution Sources and Estimation of Aquifer Parameters. J. Hydrol., 376, 48-57. Datta, B., Chakrabarty, D., & Dhar, A. (2011). Identification of Unknown Groundwater Pollution Sources Using Classical Optimization with Linked Simulation. Journal of Hydro-Environment Research, 5, 25-36. http://dx.doi.org/10.1016/j.jher.2010.08.004 Datta, B., Prakash, O., Campbell, S., & Escalada, G., (2013b). Efficient Identification of Unknown Groundwater Pollution Sources Using Linked Simulation-Optimization Incorporating Monitoring Location Impact Factor and Frequency Factor. Water Resources Management, 27, 4959 -4976. http://dx.doi.org/10.1007/s11269-013-0451-8 Domenico, P. A., & Schwartz, F. W. (1998). Physical and Chemical Hydrogeology (2nd ed.). New York: John Wiley & Sons, Inc. Go f fe , W. L. (1996). SIMANN: A Global Optimization Algorithm Using Simulated Annealing, Studied in Nonlinear Dynam- ics and Econometrics. Berkeley Electronic Press. Gorelick, S. M., Evans, B., & Ramson, I. (1983). Identifying Sources of Groundwater Pollution: An Optimization Approach. Water Resources Research, 19, 779 -790. http://dx.doi.org/10.1029/WR019i003p00779 Harbaugh, A. W., Banta, E. R., Hill, M. C., & McDonald, M. G. (2000). MODFLOW-2000, the U.S. Geological Survey modular Ground-Water Model. U.S. Geological Survey Open-File Report. 00-92, 121 p. Jha, M. K., & Datta, B. (2011) . Simulated Annealing Based Simulation-Optimization Approach for Identification of Un- known Contaminant Sources in Groundwater Aquifers. Desalination and Water Treatment, 32, 79-85. http://dx.doi.org/10.5004/dwt.2011.2681 Jha, M. K., & Datta, B. (2012). Linked Simulation-Optimization Based Methodologies for Unknown Groundwater Pollutant Source Identification in Managed and Unmanaged Contaminated Sites. Chapter 4, PhD Thesis, James Cook University. Kirkpatrick, S., Gelatt, D. C., & Vecchi, P. M. (1983). Optimization by Simulated Annealing. Science, 220, 671-680. http://dx.doi.org/10.1126/science.220.4598.671  B. Datta et al. Mahar, P. S., & Datta, B. (1997). Optimal Monitoring Network and Ground-Water Pollution Source Identification. Journal of Water Resources Planning and Management, 123, 199-207. http://dx.doi.org/10.1061/(ASCE)0733-9496(1997)123:4(199) Mahar, P. S., & Datta, B. (2000). Identification of Pollution Sources in Transient Groundwater System. Water Resources Management, 14, 209-227. http://dx.doi.org/10.1023/A:1026527901213 Mahar, P. S., & Datta, B. (2001). Optimal Identification of Ground-Water Pollution Sources and Parameter Estimation. Journal of Water Resources Planning and Management, 127, 20-29. http://dx.doi.org/10.1061/(ASCE)0733-9496(2001)127:1(20) Marsden, J. (2011). Report for Strengthening Basin Communities—Planning Study Business Case—Enhancing Dubbo’s Ir- rigation System. Dubbo City Council. Metropolis, N., Rosenbluth, A., Rosenbluth, M., Teller, A., & Teller, E. (1953). Equation of State Calculations by Fast Computing Machines. The Journal of Chemical Physics, 21, 1087-1092. http://dx.doi.org/10.1063/1.1699114 Prakash, O., & Datta, B. (2012). Sequential Optimal Monitoring Network Design and Iterative Spatial Estimation of Pollu- tant Concentration for Identification of Unknown Groundwater Pollution Source Locations. Environmental Monitoring and Assessment, 185, 5611-5626 . http://dx.doi.org/10.1007/s10661-012-2971-8 Prakash, O., & Datta, B. (2014a). Optimal Monitoring Network Design for Efficient Identification of Unknown Groundwater Pollution Sources. Int. J. of GEOMATE, 6, 785-790. Prakash, O., & Datta, B. (2014b). Characterization of Groundwater Pollution Sources with Unknown Release Time History. Journal of Water Resource and Protection, 6, 337 -350. http://dx.doi.org/10.4236/jwarp.2014.64036 Prakash, O., & Datta, B. (2014b). Optimal Monitoring Network Design and Identification of Unknown Pollutant Sources in Polluted Aquifers. Chapter 6, PhD Thesis, James Cook University. Prakash, O., & Datta, B., (2013). A Multi-Objective Monitoring Network Design for Efficient Identification of Unknown Groundwater Pollution Sources Incorporating Genetic Programming Based Monitoring. Journal of Hydrologic Engineer- ing, 19, 04014025. http://dx.doi.org/10.1061/(ASCE)HE.1943-5584.00 00 952 Puech, V. (2010). Upper Macquarie Groundwater Model. Technical Report VW04680, Office of Water, NSW Government and National Water Commission, Australia. Rushton, K. R., & Redshaw, S. C. (1979). Seepage and Groundwater Flow. New York: Wiley. Sidauruk, P., Cheng, A. H.-D., & Ouazar, D. (1997). Groundwater Contaminant Source and Transport Parameter Identifica- tion by Correlation Coefficient Optimization. Groundwater, 36, 208-214. http://dx.doi.org/10.1111/j.1745-6584.1998.tb01085.x Singh, R. M., & Datta, B. (2004). Gr ou ndwater Pollution Source Identification and Simultaneous Parameter Estimation Us- ing Pattern Matching by Artificial Neural Network. Environmental Forensics, 5, 143-159. http://dx.doi.org/10.1080/15275920490495873 Singh, R. M., & Datta, B. (2006). Identification of Groundwater Pollution Sources Using GA-Based Linked Simulation Op- timization Model. Journal of Hydrologic Engineering, 11, 101-109. http://dx.doi.org/10.1061/(ASCE)1084-0699(2006)11:2(101) Singh, R. M., & Datta, B. (2007). Artificial Neural Network Modeling for Identification of Unknown Pollution Sources in Groundwater with Partially Missing Concentration Observation Data. Water Resources Management, 21, 557-572. http://dx.doi.org/10.1007/s11269-006-9029-z Singh, R. M., Datta, B., & Jain, A. (2004). Identification of Unknown Groundwater Pollution Sources Using Artificial Neur- al Networks. J. Water Resour. Plan. Manage., 130, 506-51 4. http://dx.doi.org/10.1061/(ASCE)0733-9496(2004)130:6(506) Sun, A. Y., Painter, S. L., & Wittmeyer, G. W. (2006). A Robust Approach for Contaminant Source Location and Release History Recovery. J. Contam. Hydrol., 88, 29-44. Wagner, B. J. (1992). Simultaneous Parameter Estimation and Contaminant Source Characterization for Coupled Ground- water Flow and Contaminant Transport Modeling. Journal of Hydrology, 135, 275-303. http://dx.doi.org/10.1016/0022-1694(92)90092-A Woodbury, A. D., Sudicky, E., Ulrych, T. J., & Ludwig, R. (1998). Thr ee-Dimensional Plume Source Reconstruction Using Minimum Relative Entropy Inversion. Journal of Contaminant Hydrology, 32, 131-158. http://dx.doi.org/10.1016/S0169-7722(97)00088-0 Yeh, W. W.-G. (1986). Review of Parameter Identification Procedure in Groundwater Hydrology: The Inverse Problem. Water Resour. Res., 22, 95-108. http://dx.doi.org/10.1029/WR022i002p00095 Zheng, C., & Wang, P. P. (1999). MT3DMS, A Modular Three-Dimensional Multi-Species Transport Model for Simulation of Advection, Dispersion and Chemical Reactions of Contaminants in Groundwater Systems. Vicksburg, MS: U.S. Army Engineer Research and Development Center Contract Report SERDP-99-1, 202 p.
|