Paper Menu >>
Journal Menu >>
 Wireless Sensor Network, 2009, 2, 61-121 doi:10.4236/wsn.2009.12014 Published Online July 2009 (h ttp://www.SciRP.org/journal/wsn/). Copyright © 2009 SciRes. Wireless Sensor Network, 2009, 2, 61-121 Gaussian Convolution Filter and its Application to Tracking Qing LIN, Jianjun YIN, Jianqiu ZHANG, Bo HU Electronic Engineering Department, Fudan University, Shanghai, China E-mail: qlin98@fudan.edu.cn Received April 29, 2009; revised May 11, 2009; accepted May 12, 2009 Abstract A new recursive algorithm, called the Gaussian convolution filter (GCF), is proposed for nonlinear dynamic state space models. Based on the convolution filter (CF) and similar to the Gaussian filters, the GCF ap- proximates the posterior density of the states by Gaussian distribution. The analytical results show the ability to deal with complex observation model and small observation noise of the GCF over the Gaussian particle filter (GPF) and the lower complexity, more amenable for parallel implementation than the CF. The Simula- tion in the Tracking domain demonstrates the good performance of the GCF. Keywords: Signal Processing, Tracking, Nonlinear Estimation 1. Introduction To estimate the dynamic state from the history of noisy observations is the main objective of filtering, which arise in many fields including statistics, economics and engineering such as tracking and navigation. Based on the difference of the dynamic state space models, usually filtering can be divided into two categories: linear and nonlinear, which correspond to the linear Gaussian mod- els and nonlinear and/or non-Gaussian models respec- tively. For linear filtering, Kalman filter (KF) [1] usu ally gives the optimal results. For nonlinear filtering, the ex- tended Kalman filter (EKF) [2] is most popular. How- ever, the linearization process of the EKF is liable to large errors threatening the convergence of the algorithm, particularly for models with high nonlinearity. A re- cently-popularized technique for numerical approxima- tion, termed as the particle filter (PF) [3-5], offers a gen- eral tool for the state estimation of nonlinear non-Gaussian systems. The core idea behind the PF is to use samples (particles) to approximate the concerned distributions. Usually the PF giv es better results than the EKF and the unscented Kalman filter (UKF) [6]. How- ever, it also has drawbacks. Firstly, the algorithm is complex and difficult to parallel implementation [7]. Secondly it is prone to divergence when the observation noise is too small [8]. Thirdly, it d oes not work when th e likelihood function can not be obtained analytically [8]. The first drawback has been overcome by the Gaussian particle filter (GPF) [7], which approximates the poste- rior distributions by single Gaussians, and avoid the re- sampling step, which reduces the complexity and is more amenable for fully parallel implementation in VLSI. However the second and third shortages are still within the GPF. The convolution filter (CF) [8] has circum- vented the second and third drawbacks by using convo- lution kernels, however, the first one still remains. In this paper, we propose a new algorithm, namely the Gaussian convolution filter (GCF), which can overcome all the three drawbacks above. The GCF is based on the con- volution filtering concept, and it approximates the posterior distributions by single Gaussians. It is shown that the GCF is asymptotically optimal in the number of particle under the Gaussianity assumption. The Simulation results in the Tracking demonstrate the performance of the GCF when the observation noise is too small and the GPF fails. 2. Background In this section, we first de scribe the problem formulation. The convolution filter is then recalled. 2.1. Problem Formulation Let the following general model of a state space system  Q. LIN ET AL.91 Copyright © 2009 SciRes. Wireless Sensor Network, 2009, 2, 61-121 ) be considered [3]: 1 (, tttt xfx (1) (,) tttt yhx (2) where t and t denote the known independent process and measurement noise respectively, {xt} the state of the system complying with the Markov process, {yt} the measurements of the system, and both ft and ht are known nonlinear or linear functions. Again, let 1 ,, 1 , ttt t X xxYyy 1 , and p(x0|x-1) = p(x0) be the initial density. Here, the purpose is supposed to esti- mate the posterior probability density function (pdf) p(xt|Yt) by the Bayes recursion 1111ttttt tt px|Ypx|xpx |Ydx (3) ttttttttttt dx|Yxp|xyp|Yxp|xyp|Yxp 11 (4) 2.2. The Convolution Filter Usually in PF scheme, the weight of each particle is given by the likelihood function. The observations thus operate the filter through the likeliho od function which is assumed to exist and to be known. This assumption is rather restricting in practice. Moreover it rules out the non-noisy case and will also cause trouble when the ob- servation noise is too small and also when the noise is non-additive as in the general system (1) and (2). These drawbacks can be circumvented by using convolution kernels to weight the particles in the CF [8]. We can ap- proximate the weights consistently by simulating the observations, and use this approximation in place of the true function in the PF, i.e. | ii z ttthnt wpyx Kyy i t (5) where denote particle weights, i t w z hn K is Par- zen-Rosenblatt kernel of appropriate dimensions (A Par- zen-Rosenblatt kernel is a bound ed positive and symmet- ric function for which , where 1Kd is the Lebesgue measure, and lim 0 d xKx as x, where d is the dimension of variable y and denotes the squared norm), hn is called the kernel bandwidth, and ˆi t y are the samples from observation. Then we can get the estimation as 11 ˆ |n ii x ttt hnttt ii pxYwKxxw n i (6) A brief description of the resampled CF (RCF) is given in Table 1. Table 1. The RCF algorithm. For 0t Given p0 be the probability density of the initial state distribu- tion For 1t (1) resample: 11 1~ n i tt i x p (2) evolving: 1 ~(,),~( ,) iiii ttt ttt xfxyhx , 1,,in (3) estimation: 1 1 | nii yx hntthn tt i ttt ni y hn tt i K yyKxx pxY Kyy . 3. The Gaussian Convolution Filter In this section, we present the main results of the paper, the GCF recursion. The main idea behind the GCF is to estimate the posterior distributions by CF, and then ap- proximate them by Gaussians. 3.1. The Measurement Update Assume the density of prediction is approximated by a Gaussian [7], i.e., 1;, tt ttt px|Y x (7) where ;,x denotes the Gaussian distribution with the mean and covariance . Take (7) as the importance density and get samples from it, i.e., ~;,,1,, i tttt x xi N (8) Obtain the observations ~( ,),1,, ii ttt y hx iN (9) and the particle weights ˆ| ii z ttthnt wpyx Kyy i t (10) By substituting (7) into (4) we get ;, tt tttttt px|Ym py|xx (11) where 1 1 ttttt mpy|xpx|Yd t x (12) We approximate (11) by a Gaussian, i.e., ;, tt ttt px|Y x (13) where 11 1 NN ii i tttt ii T Nii ii tttttt t i wx w wx xw (14)  Q. LIN ET AL. 92 Copyright © 2009 SciRes. Wireless Sensor Network, 2009, 2, 61-121 where T A denotes the transpose of matrix A. We now give the corollary to verify the convergence of the algo- rithm above. Let us note that the form of corollary here is similar to that in GPF [7], however the difference is that the one here is based on the CF. Corollary 1: Assume that at time t, the prediction dis- tribution is Gaussian, i.e. 1;, tt ttt px|Y x . The GCF measurement updates the filtering distribution by the algorithm above. Then, t computed in (14) converges to the MMSE estimate of xt almost surely as , and the MMSE estimate given by t in (14) converges to the true MMSE estimate almost surely as . N N Proof: 1) mean 1 1 1 11 ~| 1 1 1 1 1 1 ˆ| ˆ|ˆ| ˆ|| ˆ|| || || || | || i ttt Nii Nii ttt tt i i ttt NN ii ttt ii xpxY ttttt t ttttt ttttt t ttttt ttttt t tt ttttt x py x xw Ex Y wpy xpyxp xYdx pyxpx Ydx xpyxp xYdx pyxpxYdx xpyxp xYdx pyY xp xYdxE xY t x . (15) 2) covariance 1 1 1 1 1 ~| 1 1 ˆˆˆ ||| ˆ| ˆ| || ˆ|| ˆ|| |||| i ttt T tttttttt T Nii i ttttt i Ni t i T Nii i tttt tt i Ni tt i T tttttt xpxY tttt t tttt t T tttttt ttt ExEx YxEx YY xxw w xx pyx py x xExY xExY pyxpx Ydx pyxpx Ydx xExY xExYpyxpx 1 1 1 1 || |||| | ||| ||| tt tttt t T t tttttttttt tt T t tttttttt T ttttttt Ydx pyxpx Ydx x Ex YxEx YpyxpxYdx py Y xExY xExYpxYdx ExExYxExYY (16) 3.2. The Time Update By substituting (13) to (3) we have 11tttt tt px |Ypx|xpx|Ydx t 1;, ttttt t px |xxdx (17) Draw samples ~;,,1,, i t ttt x xi N (18) and then a Monte Carlo approximation of the predictive distribution is given by 11 1 1Ni tt tt i px |Ypx |x N (19) Obtain samples at time t+1 from the process model by 11 ~(, i ttt xfx ) i (20 ) from which the mean and covariance of are computed as 1tt px |Y 11 1 1111 1 1 1 Ni tt i Nii tttt i x M xx 1 t M (21) Recall that the prediction distribution is approximated as a Gaussian, we have 1 111 ;, tt ttt px |Yx (22) 3.3. Summary of the GCF We summarize the algorithm above in Table 2. The GCF does away with the need of resampling step, this means that the GCF is more amenable for fully paral- lel implementation in VLSI than the CF. Moreover, be- cause of the use of convolution kernels the GCF can deal with scenarios that the observation noise is too small or the likelihood function can not be obtained analytically. 4. Tracking Simulation Results An example: Consider the problem of tracking a maneu- vering target [9], who se position and velocity at instant t are given by a continuous random vector x2t ∈ R n-1, and where the maneuver/regime of the target is repre- sented by the discrete random variable x1k ∈ R. The state to be estimated is xt ={x1t ; x2t}. The model is as follows: X2t = Fx2t-1 + Bx1t + wt ; Zt = Cx2t + et 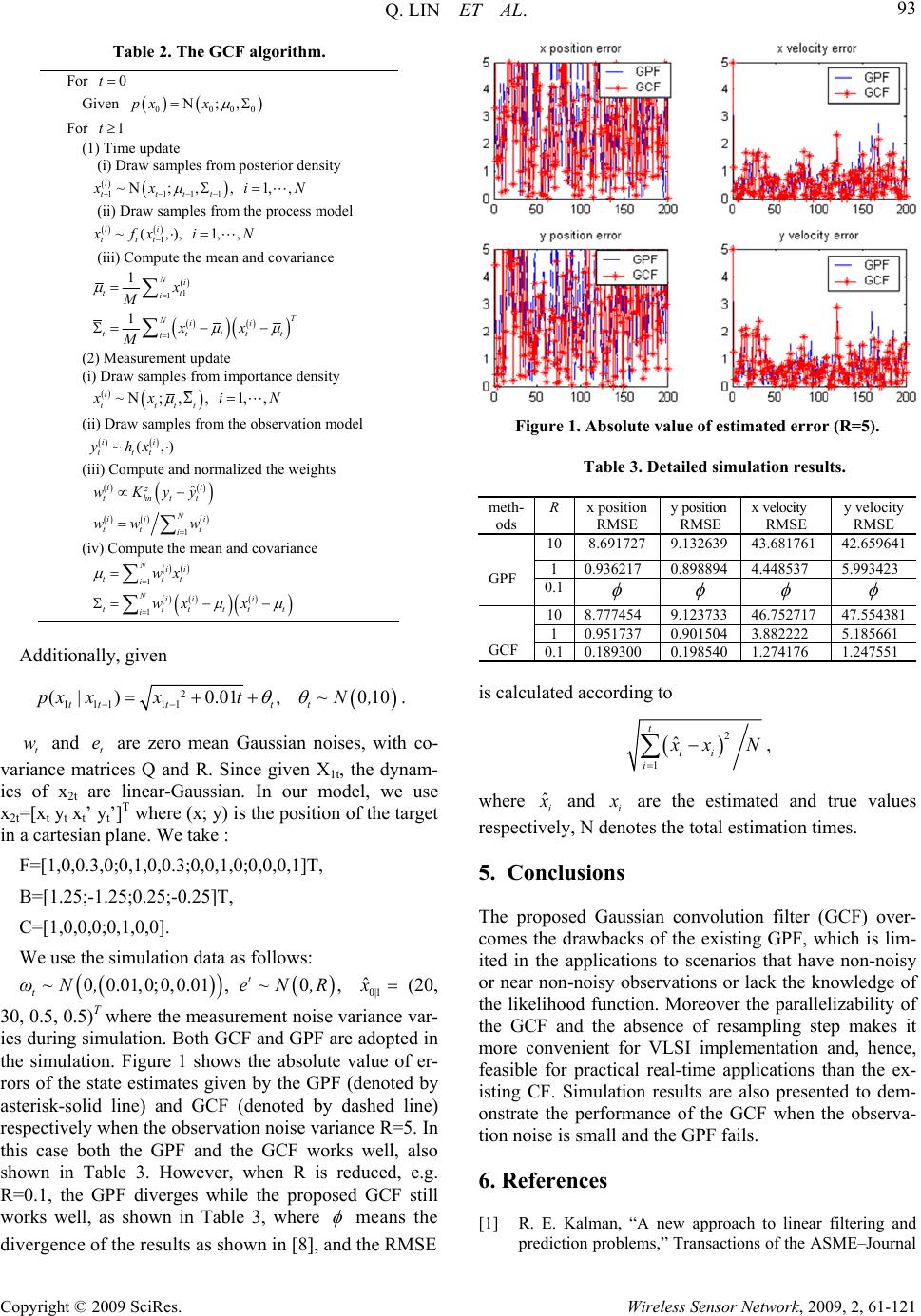 Q. LIN ET AL.93 Copyright © 2009 SciRes. Wireless Sensor Network, 2009, 2, 61-121 Table 2. The GCF algorithm. For 0t Given 0 000 ;,px x For 1t (1) Time update (i) Draw samples from posterior density 1111 ~;,,1,, i tttt x xi N (ii) Draw samples from the process model 1 ~( ,),1,, ii ttt x fx iN (iii) Compute the mean and covariance 1 1 1 1 1 Ni tt i T Nii tttt i x M xx M t (2) Measurement update (i) Draw samples from importance de n si t y ~;,,1,, i tttt x xi N (ii) Draw samples from the observation model ~( ,) ii ttt yhx (iii) Compute and normalized the weights 1 ˆ ii z thntt N ii i tt t i wKyy ww w (iv) Compute the mean and covariance 1 1 Nii ttt i Nii i t ttttt i wx wx x Additionally, given 2 111 11 (| )0.01,010 tttt t px xxt~Ν, . t w and are zero mean Gaussian noises, with co- variance matrices Q and R. Since given X1t, the dynam- ics of x2t are linear-Gaussian. In our model, we use x2t=[xt yt xt’ yt’]T where (x; y) is the position of the target in a cartesian plane. We take : t e F=[1,0,0.3,0;0,1,0,0.3;0,0,1,0;0,0,0,1]T, B=[1.25;-1.25;0.25;-0.25]T, C=[1,0,0,0;0,1,0,0]. We use the simulation data as follows: 0 0.01,0;0,0.01,0, t t ω~Ν,e~Ν,R 01 ˆ| x (20, 30, 0.5, 0.5)T where the measurement noise variance var- ies during simulation. Both GCF and GPF are adopted in the simulation. Figure 1 shows the absolute value of er- rors of the state estimates given by the GPF (denoted by asterisk-solid line) and GCF (denoted by dashed line) respectively when the observation noise variance R=5. In this case both the GPF and the GCF works well, also shown in Table 3. However, when R is reduced, e.g. R=0.1, the GPF diverges while the proposed GCF still works well, as shown in Table 3, where means the divergence of the results as shown in [8], and the RMSE Figure 1. Absolute value of estimated error (R=5). Table 3. Detailed simulation results. meth- ods Rx position RMSE y position RMSE x velocity RMSE y velocity RMSE 108.6917279.132639 43.681761 42.659641 1 0.936217 0.898894 4.448537 5.993423 GPF 0.1 108.777454 9.123733 46.752717 47.554381 1 0.951737 0.901504 3.882222 5.185661 GCF 0.10.189300 0.198540 1.274176 1.247551 is calculated according to 2 1 ˆ t ii i x xN , where ˆi x and i x are the estimated and true values respectively, N denotes the total estimation times. 5. Conclusions The proposed Gaussian convolution filter (GCF) over- comes the drawbacks of the existing GPF, which is lim- ited in the applications to scenarios that have non-noisy or near non-noisy observations or lack the knowledge of the likelihood function. Moreover the parallelizability of the GCF and the absence of resampling step makes it more convenient for VLSI implementation and, hence, feasible for practical real-time applications than the ex- isting CF. Simulation results are also presented to dem- onstrate the performance of the GCF when the observa- tion noise is small and the GPF fails. 6. References [1] R. E. Kalman, “A new approach to linear filtering and prediction problems,” Transactions of the ASME–Journal  Q. LIN ET AL. 94 Copyright © 2009 SciRes. Wireless Sensor Network, 2009, 2, 61-121 of Basic Engineering, Vol. 82-D, pp. 35–45, 1960. [2] M. K. Steven, “Fundamentals of statistical signal process- ing,” PTR Prentice-Hall, Englewood Cliffs, N.J., 1993. [3] N. J. Gordon, D. J. Salmond, and A. F. M. Smith, “Novel approach to nonlinear/non-Gaussian Bayesian state esti- mation,” IEE Proceedings-F, Vol. 140, No. 2, pp. 107–113, 1993. [4] A. Doucet, F. Nando, and N. J. Gordon, “Sequential Monte Carlo in practice,” Springer, New York, 2001. [5] T. Schon, F. Gustafsson, and P. J. Nordlund, “Marginal- ized particle filters for mixed linear/nonlinear state-space models,” IEEE Transactions on Signal Processing 2005, Vol. 53, No. 7, pp. 2279–2289. [6] J. J. Simon and K. U. Jeffrey, “Unscented filtering and nonlinear estimation,” Proceedings of the IEEE, Vol. 92, No. 3, pp. 401–422, 2004. [7] J. H. Kotecha and P. M. Djuric, “Gaussian particle filter- ing,” IEEE Transactions on Signal Processing, Vol. 51, No. 10, pp. 2592–2601, 2003. [8] V. Rossi and J.-P. Vila, “Nonlinear filter in discreet time: A particle convolution approach,” Biostatic Group of Monetepellier, Technical Report 04-03, 2004. http://vrossi.free.fr/recherche.html. [9] F. Mustiere, M. Bolic, and M. Bouchard, “A modified Rao-blackwellised particle filter[C],” IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP) 2006, Toulouse, France, Vol. 3, pp. 21–24, May 2006. |