Paper Menu >>
Journal Menu >>
 Wireless Sensor Network, 2009, 2, 61-121 doi:10.4236/wsn.2009.12013 Published Online July 2009 (h ttp://www.SciRP.org/journal/wsn/). Copyright © 2009 SciRes. Wireless Sensor Network, 2009, 2, 61-121 Target Detection in Three-Dimension Sensor Networks Based on Clifford Algebra Tiancheng HE, Weixin XIE, Wenming CAO Institute of Intelligent Information System, Shenzhen University, Shenzhen, Ch ina Email: sd76130201@szu.edu.cn Received April 27, 2009; revised May 8, 2009; accepted May 9, 2009 Abstract The three-dimensional sensor networks are supposed to be deployed for many applications. So it is signifi- cant to do research on the problems of coverage and target detection in three-dimensional sensor networks. In this paper, we introduced Clifford algebra in 3D Euclidean space, developed the coverage model of 3D sensor networks based on Clifford algebra, and proposed a method for detecting target moving. With Clif- ford Spinor, calculating the target moving formulation is easier than traditional methods in sensor node’s coverage area. Keywords: 3D Sensor Networks, Clifford Algebra, Spinor, Target Detection, Coverage 1. Introduction Three-dimensional sensor networks [1] could enable a broad range of applications: Video Surveillance, Ocean Sampling, Environmental Monitoring, Assisted Naviga- tion, and etc. As an emerging technology which can put the information field to a new stage, the theory and ap- plications of three-dimensional intelligent sensor net- works have become a key research aspect. With the coming availability of low cost, short range radios along with advances in wireless networking, it is expected that wireless ad hoc sensor networks will become commonly deployed. So it is useful to study three-dimensional intel- ligent sensor network systems. The coverage problem and target detection problem are the fundamental issues in 3D intelligent sensor network systems. Studies on sensor networks include distributed network, distributed information acquisition, distributed intelligent informa- tion fusion and so on. Xie [2,3] proposed a coverage analysis approach for sensor networks based on Clifford algebra. In a 2-dimensional plane, a homogeneous com- putational method of distance measures has been pro- vided for points, lines and areas, and a homogeneous coverage analysis model also has been proposed for tar- gets with hybrid types and different dimensions. Thus, an analysis framework has been established for sensor net- works in Clifford geometric space. To evaluate the qual- ity of network coverage, Megerian [4] used Voronoi dia- gram and Delaunay triangulation respectively to define the worst and best-case coverage in sensor networks. There are also a lot of improved methods to solve these problems [5-8]. The target detection problem in sensor networks also has been a topic of extensive study under different met- rics and assumptions [9-11]. There are already some related theories and algorithms proposed for solving the problems of target detection in sensor networks. The work of target detection in sensor networks includes many aspects, as the following: The Traversing Path Detection [12]: A traversing path without being detected should not intersect the sensing areas of any sensors [13]. The detection rate of a sensor network is interested in applicatio n scenarios such as vehicles crossing a battlefield in military operations. Meguerdichian mentioned a novel coverage model for the target detection [14], and proposed an approximate value algorithm for calculating the traversing path [15]. There are also some distributed algorithms to calculate the efficient value in the sensor networks for detecting target [16]. Another way to solve the problem is the lo- calized algorithm with lower computational complexity [17]. It uses polar coordinates to detect target and calcu- 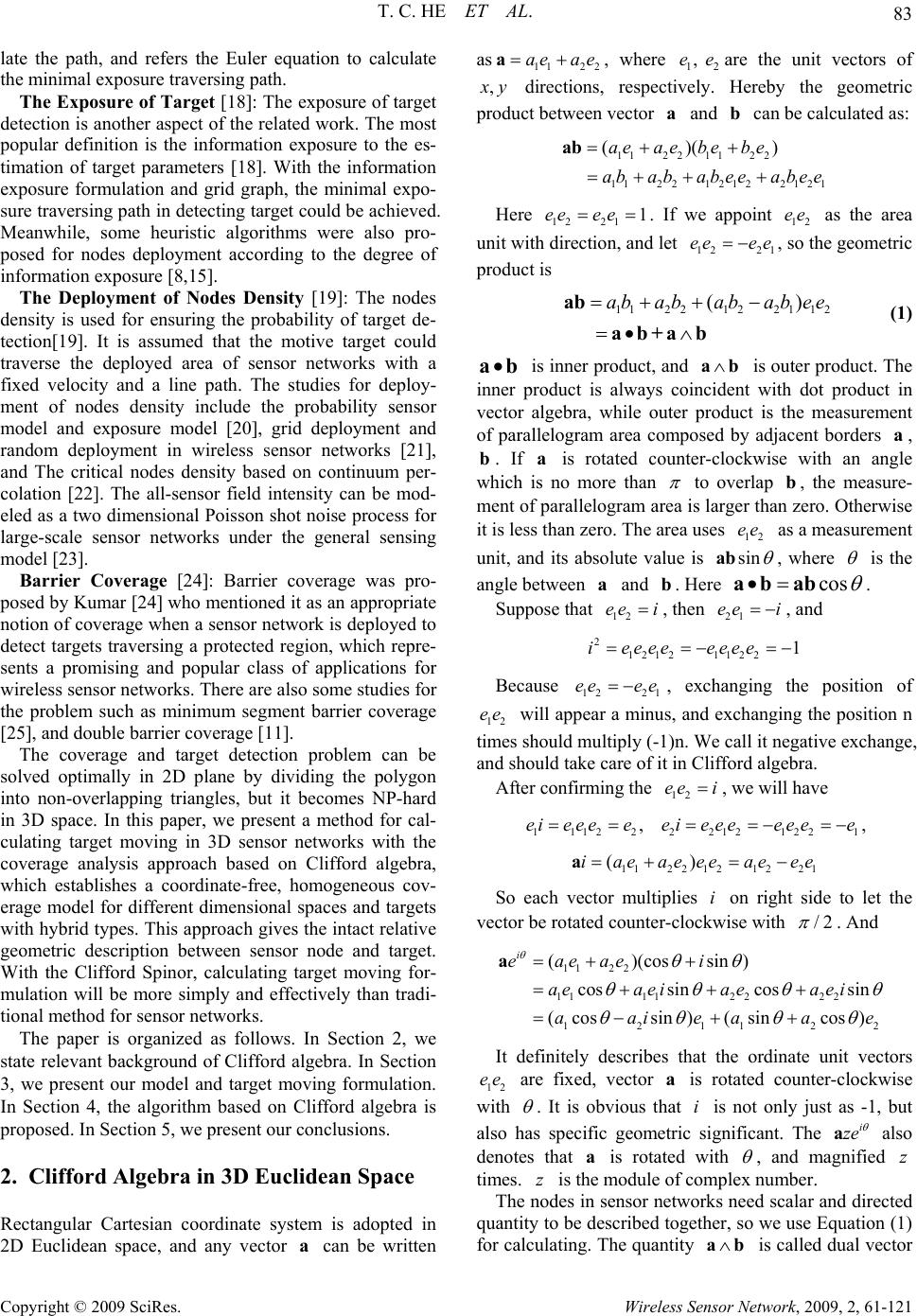 T. C. HE ET AL. 83 late the path, and refers the Euler equation to calculate the minimal exposure traversing path. The Exposure of Target [18]: The exposure of target detection is another aspect of the related work. The most popular definition is the information exposure to the es- timation of target parameters [18]. With the information exposure formulation and grid graph, the minimal expo- sure traversing path in detecting target could be achieved. Meanwhile, some heuristic algorithms were also pro- posed for nodes deployment according to the degree of information exposure [8,15]. The Deployment of Nodes Density [19]: The nodes density is used for ensuring the probability of target de- tection[19]. It is assumed that the motive target could traverse the deployed area of sensor networks with a fixed velocity and a line path. The studies for deploy- ment of nodes density include the probability sensor model and exposure model [20], grid deployment and random deployment in wireless sensor networks [21], and The critical nodes density based on continuum per- colation [22]. The all-sensor field intensity can be mod- eled as a two dimensional Poisson shot noise process for large-scale sensor networks under the general sensing model [23]. Barrier Coverage [24]: Barrier coverage was pro- posed by Kumar [24] who mentioned it as an appropriate notion of coverage when a sensor network is deployed to detect targets traversing a protected region, which repre- sents a promising and popular class of applications for wireless sensor networks. There are also some studies for the problem such as minimum segment barrier coverage [25], and double barrier coverage [11]. The coverage and target detection problem can be solved optimally in 2D plane by dividing the polygon into non-overlapping triangles, but it becomes NP-hard in 3D space. In this paper, we present a method for cal- culating target moving in 3D sensor networks with the coverage analysis approach based on Clifford algebra, which establishes a coordinate-free, homogeneous cov- erage model for different dimensional spaces and targets with hybrid types. This approach g ives the intact relative geometric description between sensor node and target. With the Clifford Spinor, calculating target moving for- mulation will be more simply and effectively than tradi- tional method for sensor networks. The paper is organized as follows. In Section 2, we state relevant background of Clifford algebra. In Section 3, we present our model and target moving formulation. In Section 4, the algorithm based on Clifford algebra is proposed. In Section 5, we present our conclusions. 2. Clifford Algebra in 3D Euclidean Space Rectangular Cartesian coordinate system is adopted in 2D Euclidean space, and any vector can be written as a 112 2 ae ae a , , where are the unit vectors of 12 ,ee x y ab 12 2 ee e directions, respectively. Hereby the geometric product bet we en vector and can be calculated as: a 2 11 2 12 ()e be ab b 12 (b ee 112 2 11 2121 )ae e ab aabee 2 2 a b Here 11e . If we appoint as the area unit with direction, and let , so the geometric product is 12 ee 112 ee 2 21 b a 2 ee 2 b 1121 12 (abab ee a ) a b ab ab+ (1) ab a is inner product, and is outer product. The inner product is always coincident with dot product in vector algebra, while outer product is the measurement of parallelogram area composed by adjacent borders , . If is rotated counter-clockwise with an angle which is no more than ab a b to overlap b, the measure- ment of parallelogram area is larger than zero. Otherwise it is less than zero. The area uses as a measurement unit, and its absolute value is 12 ee sin ab , where is the angle between and b. Here acos ab ab. Suppose that 12 eei , then , and 21 ee 12 i 2 i12 21eee e 12 e1 eee Because 12 ee 2 ee 1 , exchanging the position of will appear a minus, and exch anging the position n times should multiply (-1)n. We call it negative exchange, and should take care of it in Clifford algebra. 12 ee 111 eieee After confirming the , we will have 12 ee i 2 2 i ee 222 122 ,eeee e 1 e1 e 2 212 ()aeee , 111221 iae aeee i a So each vector multiplies on right side to let the vector be rotated counter-clockwise with /2 . And 11 11 ( cos (cos i eae ae 2 2 1 22 12 12 )(cos cos sin sincos ) ae ae aei aa aa 1s sin i22 1 ) e 2 e sin in ) ( i a ie a 12 ee It definitely describes that the ordinate unit vectors are fixed, vector is rotated counter-clockwise with a . It is obvious that is not only just as -1, but also has specific geometric significant. The i i ze a also denotes that is rotated with a , and magnified times. is the module of complex number. z z The nodes in sensor networks need scalar and directed quantity to be described together, so we use Equation (1) for calculating. The quantity is called dual vector ab Copyright © 2009 SciRes. Wireless Sensor Network, 2009, 2, 61-121 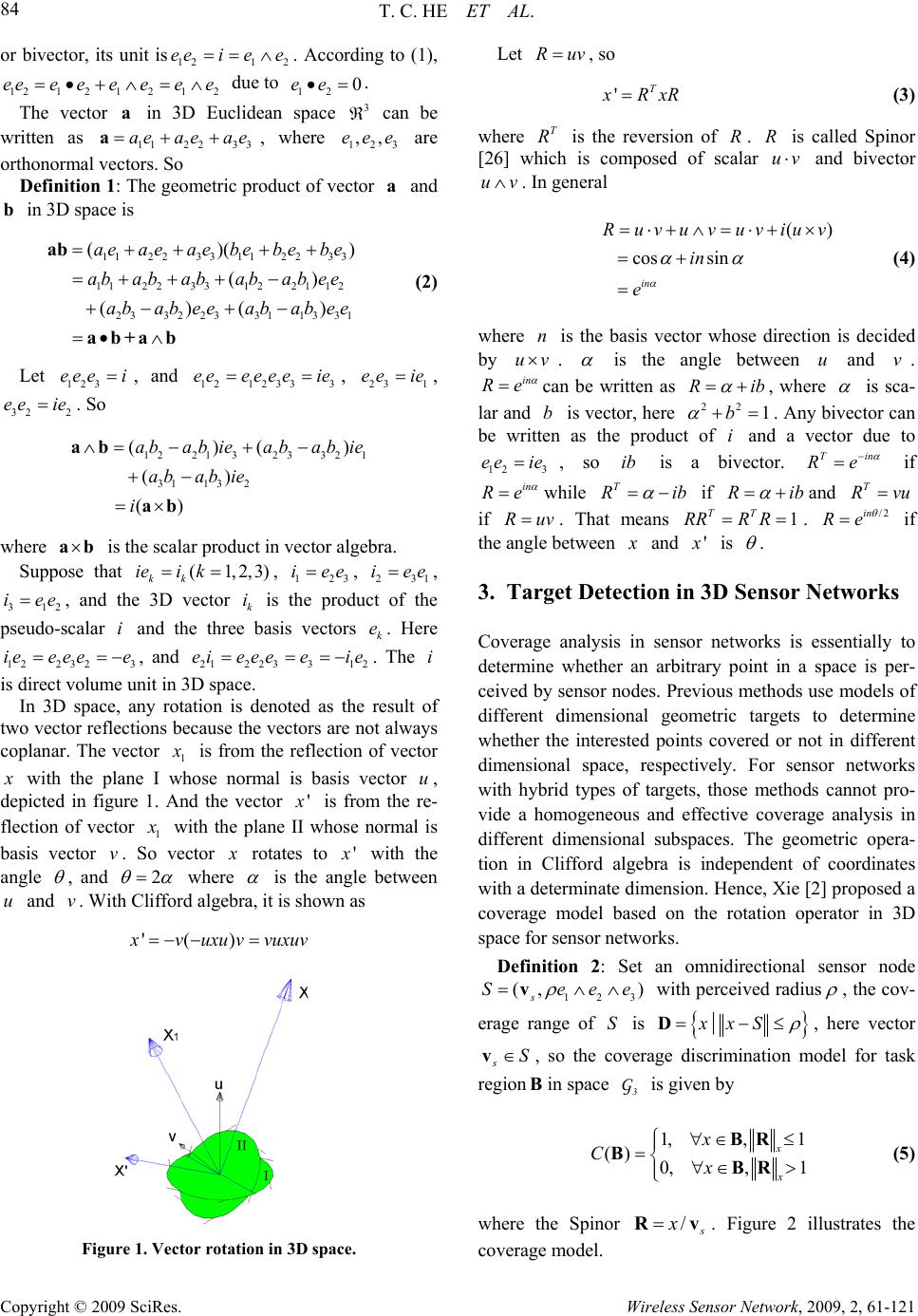 T. C. HE ET AL. 84 Copyright © 2009 SciRes. Wireless Sensor Network, 2009, 2, 61-121 ) or bivector, its unit is. According to (1), due to . 121 2 eei ee 1 2 ee 2 23 3 ae ae 233112 2 3312 32 2331 ()( ( ) ( aebebe ababab ab eeab b 12 1233 ee eeee 121 212 eeeeee a 11 aea b 11 2 11 2 23 ( ae ae ab ab ab ab ab+a 123 eee i 12 0ee 3 ee 2 33 21 12 13 31 ) ) be ee abee 3 ie The vector in 3D Euclidean space can be written as , where are orthonormal vectors. So 123 ,,e Definition 1: The geometric product of vector and in 3D space is a (2) Let , and , 23 1 ee ie , . So 32 2 ee ie 12 ( ( ab i ab ab 21323 3113 2 () ) ) ab ieab abab ie ab (1,2,3) kk i k 32 1 (ab ie 123 iee ) 1 where is the scalar product in vector algebra. Suppose that ie , , 23 iee , , and the 3D vector is the product of the pseudo-scalar and the three basis vectors . Here , and . The is direct volume unit in 3D space. 312 iee i 12 2323 ie eeee k i 212 2 3 eieee 1 k e i 312 e ie In 3D space, any rotation is denoted as the result of two vector reflections because the vectors are not always coplanar. The vector x is from the reflection of vector x with the plane I whose normal is basis vector , depicted in figure 1. And the vector u ' x is from the re- flection of vector 1 x with the plane II whose normal is basis vector . So vector v x rotates to ' x with the angle , and 2 where is the angle between and v. With Clifford algebra, it is shown as u '() x vuxu vvuxuv Figure 1. Vector rotation in 3D space. Let Ruv , so 'T x RxR (3) where is the reversion of . is called Spinor [26] which is composed of scalar u and bivector T RRRv uv . In general () cossin in Ruvuvuviuv in e (4) where is the basis vector whose direction is decided by n vu . is the angle between and . uv in Re can be written as Rib , where is sca- lar and is vector, here . Any bivector can be written as the product of i and a vector due to b 3 ie 22 1b 12 ee , so ib is a bivector. T Re in if in Re while T Ri b if Rib and T Rvu if Ruv . That means . if the angle between 1 TT RRR R /2in Re x and ' x is . 3. Target Detection in 3D Sensor Networks Coverage analysis in sensor networks is essentially to determine whether an arbitrary point in a space is per- ceived by sensor nodes. Previous methods use models of different dimensional geometric targets to determine whether the interested points covered or not in different dimensional space, respectively. For sensor networks with hybrid types of targets, those methods cannot pro- vide a homogeneous and effective coverage analysis in different dimensional subspaces. The geometric opera- tion in Clifford algebra is independent of coordinates with a determinate dimension. Hen ce, Xie [2] proposed a coverage model based on the rotation operator in 3D space for sensor networks. Definition 2: Set an omnidirectional sensor node 123 (, ) s Seee v with perceived radius , the cov- erage range of is S |xxS D, here vector sS v B3 G , so the coverage discrimination model for task region in space is given by 1,, 1 () 0,, 1 x Cx BR BBR x x (5) where the Spinor / s x Rv . Figure 2 illustrates the coverage model.  T. C. HE ET AL. 85 Copyright © 2009 SciRes. Wireless Sensor Network, 2009, 2, 61-121 S Vs x B 2 22 2 '()( ()() () ()() T R Ribib ibi b ibib bb ib ib b ibibR ) Here the exchange among vector , pseudo-scalar and i is positive, but is negative between and vec- tor . b With 2 'R , consider 1 TTT RRReRRR , here 3 2 11 1 13 12 (cossin) cossin ie T ReR eRee eie ee (8) Figure 2. Coverage model based on Clifford Spinor in 3D space. The relationship between sensor node and target is al- ways depicted by Euler angle, and it would be illustrated by Clifford algebra without coordinates. So the Clifford algebra can present 3×3 Spinor matrix, and the angle transformation is And 1 12 12 12 3 (cos sin) cossin cossincossinsin T ie Ree R eee ee e (9) 333 333 /2/2/2/2 /2 /2 TTT ieieieie ie ie xRRRxRRR eeexeee R (6) So 33 11 23 12 3 122 13 (cossincossinsin ) cos()sincos()sinsin coscoscossinsincoscos sincossinsinsin T ie ie fRe eeR eee ee eee ee Let , and is the new vector that is iso- morphic with in new position after transformation. e k fR ek kk f (10) Theorem 1: The vector which is perpendicular with axis rotates to , so 2 'T RR R R (7) Meanwhile 221 1 23 cos cos coscos sin sinsincos sinsincossin fee e ee (11) Proof: is perpendicular with vector b in R ib whose direction is same as axis, so bb bb bb , that means the negative exchange between vectors which are perpendicular with each other. So 33 21 cossin cossinsinfe ee (12) The Spinor matrix ( jkj k Rfe) is coscossin cossincossinsincoscossin sin cos sin sinsincoscos coscossinsincos sin sin sinsin coscos jk R (13) With the method of Clifford algebra, we can easily calculate the 3×3 Spinor matrix of arbitrary angle rotating around any vector . The element of this ma- trix is n circumstance can be written as . Here 0 () T jkj k RReRe 0 denotes the vector of grade zero which is scalar part, because the result will normally be 01 2 3 jk R . We have known that the established just is a simple scalar quantity, so we don’t have to denote its vector of grade zero, where (' ) j kjk j RfeReRe k (14) Generally, it is more suitable that the element under this  T. C. HE ET AL. 86 Copyright © 2009 SciRes. Wireless Sensor Network, 2009, 2, 61-121 j ) 2 ()() ()() Tjj jj jjj ReRibe ib ibeie b eibeiebbeb With ()2()2()2( jj jjj iebbeieb iiebeb , 2 ()( 2 jjj jj jjj j bebbeb ebbeb eb bebbbee bbbebbe ) j j Hence 22 ()2()2 Tjjj ReRbeebb eb , And 22 )( )2)( Tjjkj (()2( ) jjjk R eRebebeb eeb where cos 2 , sin 2 bn , is the angle, nis the unit vector for rotating. (3.10) can be written as cosin()(1coss) j kjkjkjk nenRen Here (15) j k is Kronecker symbol. When jk, 1 jk , otherwise 0 jk . The second part in (15) is a general vector operation wated by spe- cific ) j k enen hich can be easily calcul j,kbecause () ( kj e e 2 . For exam- ple, j , 3k , and23 1 ee e, so ()n j ek e 11 enn . Therefore, the second part is 1sinn here which can infer the other parts. The final result is 2 1123132 2 123223 1 2 312 3113 cos(1cos)(1cos )sin(1cos)sin (1cos)sincos(1cos )(1cos)sin (1 cos)sin(1 cos)sincos(1 cos) jk nnnnnnn Rnnnnnn n nnn nnnn The conventional methods can also achieve this result, but this method is straight and do not need the graph for help. Hence the target moving can be detected in cover- age area of sensor networks by Clifford algebra, as shown in figure 3. If the target moves from x to ' x , that is 'T x RxR ax aR (1) where 6 x is the position of target. Each element in (16) would be time fu onction, so the target mving formulation is ' x xxaRR (17) Theorem 2: In (17), TT x RxR RxRR can be cal- culated by (18): () T x Rx R where R (18) is target’s angular velocity to sensor node. Proof: Suppose that 1RRx 2 And 0 TT RR RR 11 0 22 TT T RRRR 1 ,2 TT RR T Here 1 T RR , ted as () TT RR . i is bector, and can be deno iv . So 2T RR orR 2T iR . Thus 11 T T1 () 22 2 TTT TT x RxRRRxRRR RxxR RR R and xR RxR 1()( 2 TT ) x RxxRxRxRR R Or ()( 2 TT i () x ix and () x ix , ) x Rx xRRx R R With '[()] T x RxxR a (19) The target moving formulation can further be denoted as '[()][()()] x xxx xxa RR (20)  T. C. HE ET AL. 87 X' X S Figure 3. The target moving path de te cted by sensor node. where () ()() 11 '()()' TT iR xRRxRi 22 [()''()] 2 [()()] 2 () () TT TTT T T T xR xRRxR i R xR RR RxR i Rx xR RxR Rx R R And () TT TT x RxR RxRRxRRxR R . Therefore, '[2() ()] T x Rxxx xRa (21) In the 3D space, the movement formulation of the tar- ge w ' t m is ''mx g , here is the power of the target so [ T2() ()] R mxxxxR mag [2() ()]' TT mxxxxRmaRRgRg [2() ()]T mxg mxxxRmaR We can achieve the movement formulation of the tar- get in sensor networks, which will help us to analyze the state of the detected target. 4. otive target detection algor- ithm based on Clifford Spinor. We assume that the mo- or networks can be detected by some n the range of these nodes also Algorithm With the movement formulation of the target in 3D sen- sor netw orks, we pr opose a m tive target in sens nodes, and its positions i can be calculated. Because the surveillance range of a node is always small, the track of the target in the range will be considered as a line approximately. Our algo- rithm for tracking the motive target is following: 1) Detect the two vertexes of the track when the target is in the range of node; 2) Use (17) or (20) to calculate the movement formu- lation of the target; 3) Use the movement states of target to estimate the direction and velocity so as to inform the next correlative node turning on and starting to detect the target; 4) Collect all information from each node, and achieve the track of the motive target in the sensor networks. Figure 4 shows the motive target detection using moving formulation calculated by Clifford Spinor in 3D sensor networks, where (a) is the target’s actual path to traverse sensor networks, and (b) is the target’s travers- ing path achieved by moving formulation. The target positions in sensor’s coverage area can be used to calcu- late the moving formulation to get the traversing path in this area. Connecting all of these paths which are achieved from each node can get the target’s track in sensor networks. It is helpful for target tracking and forecasting. (a) (b) Figure 4. Target dete ction in 3D se nsor networks. Copyright © 2009 SciRes. Wireless Sensor Network, 2009, 2, 61-121  T. C. HE ET AL. 88 Copyright © 2009 SciRes. Wireless Sensor Network, 2009, 2, 61-121 100 200 300400500 600 700 800 9001000 0 5 10 15 20 25 30 35 40 45 Number of Sensor No des Cpu T im e Time C onsuming of Three Methods Cliff ord Me thod Pauli Method Cartesian Method [5] Figu hree methods. Figure 5 denotes the time consuming to calculate tar- get moving formulation using Cartesian method, polar coordinates method and Clifford method, respectively. It is obvious that the time consuming using Clifford method is lower than that of the other two methods the number of sensor nodes increases. This is because the Cartesian method should use the information of three axes in 3D space and the polar coordinates me would calculate three 3×3 Pauli matrices. The quantity of calculation is decreased in Clifford method due to just using Spinor equation to get the moving formulation without axes information in 3D space. lusions ported by National Natural Science on Clifford algebra,” Science in China Series F-Information Sciences, Vol. 51, No. 5, [3] W. X. Xie, T. C. He, and W. M. Cao, “Path analyses of B. Srivastava, “Worst and best-case coverage in sensor net- ransactions on Mobile Computing, Vol. 4, No. 1, pp. 84–92, 2005. bedded Networked Sensor Sys- babilistic diagram,” Jour- chnology, Vol. 23, No. 1, pp. 154–165, 2008. i, J. Wu, M. Lu, and M. O. Pervaiz, “Maximum l, oc sensor networks,” in IEEE INFOCOM, Vol. 3, pp. 1380–1387, 2001. re 5. The comparison of time consuming among t [6] when [7] A. D. Gupta, A. Bishnu, and I. Sengupta, “Optimisation problems based on the maximal breach path measure for wireless sensor network coverage,” ICDCIT, pp. 27–40, 2006. thod [8] G. Veltri, Q. Huang, G. Qu, and M. Potkonjak, “Minimal and maximal exposure path algorithms for wireless em- bedded sensor networks,” Proceedings of the 1st Interna- tional Conference on Em 5. Conc In this paper, we developed the coverage model of 3D sensor networks with the coverage analysis approach based on Clifford algebra, which establishes a coordi- nate-free, homogeneous coverage model for different dimensional spaces and targets with hybrid types, and proposed the method for detecting target moving. With Clifford Spinor, calculating the target moving formula- tion is easier than traditional methods in sensor node’s coverage area. It is helpful to the research of coverage analysis in sensor network s. 6. Acknowledgements This research is sup Foundation (No.60872126) and Guangdong Province Natural Science Foundation (No.8151806001000002). 7. References [1] C. Tian, W. Liu, J. Jin, Y. Wang, and Y. Mo, “Localiza- tion and synchronization for 3D underwater acoustic sensor network,” Proceedings of UIC 2007, pp. 622–631, July 2007. [2] W. X. Xie, W. M. Cao, a nd S. Meng, “Coverage analysi s for sensor networks based pp. 460–475, 2008. sensor networks based on Clifford algebra,” Acta Elec- tronica Sinica, Vol. 35, No. 12A, pp. 27–31, 2007. [4] S. Megerian, F. Koushanfar, M. Potkonjak, M. works,” IEEE T X. Li, P. Wan, and O. Frieder, “Coverage problem in wireless ad-hoc sensor networks,” IEEE Transactions on Computers, Vol. 52, No. 6, pp. 753–763, 2003. T. C. He, W. M. Cao, and W. X. Xie, “Research of breach issue for sensor networks based on Clifford geo- metrical algebra,” Chinese Journal of Scientific Instru- ment, Vol. 28, No. 8, pp. 161–165, 2007. tems (SenSys’03), Los Angels, CA, USA, pp. 40–50, 2003. [9] L. Lazos, R. Poovendran, and J. A. Ritcey, “Pro detection of mobile targets in heterogeneous sensor net- works,” in Proceedings of IPSN’07, pp. 519–528, 2007. [10] W. Z. Zhang, M. L. Li, and M. Y. Wu, “An al gorithm for target traversing based on local Voronoi nal of Software, Vol. 18, No, 5, pp. 1246–1253, 2007. [11] C. D. Jiang and G. L. Chen, “Double barrier coverage in dense sensor networks,” Journal of Computer Science and Te [12] M. Cardei, M. T. Thai, Y. Li, and W. Wu, “En- ergy-efficient target coverage in wireless sensor net- works,” Proceedings of IEEE INFOCOM’05, Miami, FL, pp. 1976–1983, 2005. [13] M. Carde network lifetime in wireless sensor networks with ad- justable sensing ranges,” Proceedings of IEEE Interna- tional Conference on Wireless and Mobile Computing, Networking and Communications (WiMob’05), Montrea Canada, pp. 1–8, 2005. [14] S. Meguerdichian, F. Koushanfar, M. Potkonjak, and M. B. Srivastava, “Coverage problems in wireless ad-h  T. C. HE ET AL. 89 Copyright © 2009 SciRes. Wireless Sensor Network, 2009, 2, 61-121 ro- discrete targets in wireless sensor , 2002. Srivastava, “Critical density thresh- orst and best information exposure 997. Mobile Ad-hoc and l Conference on Robotics and [15] S. Meguedrichian, S. Slijepcevic, V. Karayan, and M. Potkonjak, “Localized algorithms in wireless ad-hoc networks: Location discovery and sensor exposure,” P ceedings of ACM MobiHoc’01, Long Beach, CA, USA, pp. 106–116, 2001. [16] M. Lu, J. Wu, M. Cardei, and M. Li, “Energy-efficient connected coverage of networks,” Proceedings of 2005 International Conference on Computer Networks and Mobile Computing (ICCN- MC’05), Zhangjiajie, China, pp. 1–10, 2005. [17] X. Li, P. Wan, and O. Frieder, “Coverage in wireless ad-hoc sensor networks,” Proceedings of IEEE Interna- tional Conference on Communications (ICC’02), New York, NY, USA, pp. 1–5 [18] S. Meguerdichian, F. Koushanfar, G. Qu, and M. Potkon- jak, “Exposure in wireless ad hoc sensor networks,” Pro- ceedings of ACM MobiCom’01, pp. 139–150, 2001. [19] S. Adlakha and M. olds for coverage in wireless sensor networks,” Proceed- ings of IEEE Wireless Communications and Networking Conference (WCNC’03), NewOrleans, Louisiana, USA, pp. l6–20, 2003. [20] B. Wang, et al., “W paths in wireless sensor networks,” Proceedings of MSN 2005, pp. 52–62, December 2005. [21] B. Liu and D. Towsley, “On the coverage and detectabil- ity of large-scale wireless sensor networks,” Proceedings of WiOpt’03: Modeling and Optimization in Mobile, Ad Hoc and Wireless Networks, INRIA Sophia-Antipolis, France, pp. 1–3, 2003. [22] R. Meester and R. Roy, “Continuum percolation,” Bal- letin of the American Mathematical Society, Vol. 34, No. 4, pp. 447–448, 1 [23] B. Liu and D. Towsley, “A study of the coverage of large-scale sensor networks,” Proceedings of the 1st IEEE International Conference on Sensor Systems (MASS’04), Florida, USA, pp. 475–481, 2004. [24] S. Kumar, T. Lai, and A. Arora, “Barrier coverage with wireless sensors,” Wireless Network, Vol. 13, pp. 817– 834, 2007. [25] S. Kloder and S. Hutchinson, “Barrier coverage for vari- able bounded-range line-of-sight guards,” in Proceedings of IEEE Internationa Automation 2007, pp. 391–396, April 2007. [26] J. O’Rourke, “Computational geometry: Column 15,” International Journal of Computational Geometry and Applications, Vol. 2, No. 2, pp. 215–217, 1992. |