 Intelligent Control and Automation, 2011, 2, 144-151 doi:10.4236/ica.2011.22017 Published Online May 2011 (http://www.SciRP.org/journal/ica) Copyright © 2011 SciRes. ICA A Measure Theoretical Approach for Path Planning Problem of Nonlinear Control Systems Amin Jajarmi1, Hamidreza Ramezanpour2, Mohammad Dehghan Nayyeri3, Ali Vahidian Kamyad3 1Department of Electrical Engineering, Ferdowsi University of Mashhad, Mashhad, Iran 2Department of Nuclear Engineering and Physics, AmirKabir University of Technology, Tehran, Iran 3Department of Applied Mathematics, Ferdowsi University of Mashhad, Mashhad, Iran E-mail: jajarmi@stu-mail.um.ac.ir Received October 19, 2010; revised May 13, 2011; accepted May 15, 2011 Abstract This paper presents a new approach to find an approximate solution for the nonlinear path planning problem. In this approach, first by defining a new formulation in the calculus of variations, an optimal control problem, equivalent to the original problem, is obtained. Then, a metamorphosis is performed in the space of problem by defining an injection from the set of admissible trajectory-control pairs in this space into the space of positive Radon measures. Using properties of Radon measures, the problem is changed to a measure-theo- retical optimization problem. This problem is an infinite dimensional linear programming (LP), which is ap- proximated by a finite dimensional LP. The solution of this LP is used to construct an approximate solution for the original path planning problem. Finally, a numerical example is included to verify the effectiveness of the proposed approach. Keywords: Path Planning, Optimal Control, Measure Theory, Linear Programming 1. Introduction In the control theory, the path planning problem finds an admissible control for steering the control system from an initial state to a desired final state in a certain finite time interval. This problem has been developed initially by the aerospace industries for trajectory modification of aircrafts and space vehicles [1]. Moreover, it is one of the most applicable control problems, especially in robot industrial and etc [2-4]. However, the inherent nonlinear- ity of practical systems presents a challenging path plan- ning problem. For many systems, the conventional trial and error method can work quite well to find system schedules. But for more advanced ones, more accurate methodologies are needed. For instance, in [5] the prob- lem of optimal path planning has been considered as a semi- infinite constrained optimization problem. In the filed of path planning, many different solution methods have been developed [6]. Most of the conven- tional methods, such as road mapping [7] and potential field [8], have some weaknesses in common. In the road mapping method, which is probabilistic, the heuristic nature of path generation leads to the difficulty in char- acterizing the algorithm in terms of performance, com- plexity, and reliability [9]. Potential field path planning method has been appeared frequently in the literatures; however, it has been plagued with inherent limitations [10]. In [11] a chaotic genetic algorithm has been used to find the shortest path for a mobile robot to move in a static environment. Besides, in [12] a chaotic particle swarm optimization (PSO) algorithm with mutation op- erator has been employed in the path planning. But, since the path planning is a complex NP-hard problem, general particle swarm optimizer is slow in convergence and is easy to be trapped in local optima, especially in complex multi-apex search problem. In [13] a variational ap- proach has been proposed for path planning in three di- mensions by defining an energy integral over the path, using gradient flow on the defined energy, and evolving the entire path until a locally optimal steady state is reached. A mixed integer linear programming (MILP) method has also been proposed in [14,15] which yields an optimization-based technique and performs quite well in specific instances. This method combines linear pro- gramming (LP) problem with the ability of constraining some subset of the state variables to be integers. In the past few years, the idea of finding solutions of  A. JAJARMI ET AL.145 some problems by converting them to a suitable optimal control problem has received growing attentions. In [16-18] you can see some applications of this idea for solving a number of ordinary and partial differential equations. The path planning problem can also be con- verted to an optimal control problem by considering a suitable objective function. Therefore, optimal control concepts can be used which present a systematic ap- proach to solve the problem. In [19], a new optimal con- trol problem, equivalent to the path planning problem, has been obtained by defining a new formulation in the calculus of variations. Discretizing this new problem yields a nonlinear programming (NLP) which may have a large number of variables and a large number of con- straints. To overcome this difficulty and reduce the computational complexity, an iterative algorithm has also been introduced in [19] in which a sequence of reduced order NLP’s is solved instead of directly solving the large NLP obtained through the discretization. However, solving NLP problems is much more difficult than solving LP ones. In [20] a suitable tool is introduced to obtain approxi- mate solutions for optimal control problems using the concept of measure theory [21-23]. In this approach, to find an acceptable solution, only a LP problem should be solved. Therefore, the approach has the advantage that it sets aside completely the nonlinearity of the problem. Moreover, it does not depend on the convexity of objec- tive function. Besides, it is practical for systems with too complicated nonlinear terms. In this paper, using the concept of measure theory, a novel practical approach is proposed to approximate the solution of nonlinear path planning problem. The pro- posed approach in comparison with other numerical me- thods works well; especially it is practical and accurate enough for systems with too complicated nonlinear terms. Moreover, as the obtained control function is piecewise constant, it is suitable for switching systems. Besides, error is completely controllable and accuracy can be im- proved as fine as desired. The paper is organized as follows. Section 2 defines the problem of path planning, and Section 3 proposes a new formulation for this problem. In Section 4, a meta- morphosis is performed to convert the problem to an infinite-dimensional LP in measure space. Then, by in- troducing two stage approximations in Section 5, a fi- nite-dimensional LP is obtained. In Section 6, an illustra- tive example is presented to verify the effectiveness of the proposed approach. Finally, conclusions are given in the last section. 2. Definition Consider the following general form of nonlinear path planning problem: ,, s.t. , , , aabb ab tgxtutt xtAut U txxtx tJ tt (1) where :n JR is the state trajectory which is as- sumed to be absolutely continuous on and be con- strained to stay in the compact set n R, :uJm R is the control function which is a bounded measurable function on and takes its values in the compact set , m UR : V is a continuous function where V is a compact set and n R UJ , a A and b A are the initial and final states, respectively. In addition, it is assumed that () t satisfies the differential equation of system, almost everywhere on . Path planning problem is the problem of guiding control system from the known initial state a at 0a tt to the given final state b at b Remark 1.1. Under the above-mentioned assumptions, the nonlinear system in (1) without the final condition tt. bb tx has a unique solution t ut for every bound- ed measurable control function [24]. In this situa- tion, under assumption that be continuous on , the solution of system obtained from a piecewise con- tinuous control function ut is piecewise function, i.e. 1 C t is continuous piecewise differentiable and has piecewise continuous derivative [24]. 3. New Formulation In [25], there is a new formulation for the path planning problem of linear time-varying systems. Here, that for- mulation is extended for the nonlinear system in (1) by defining a function as follows: 21 : (,,,) ,, nm FR R xtxt ut txtgxt utt (2) where is a suitable continuous norm on and n R 0,R . Now the following variational problem can be defined: min ,,,d s.t. , , , J aabb xtxt ut tt xtAut U txxtxtJ (3) where , , and U are as before. Copyright © 2011 SciRes. ICA  A. JAJARMI ET AL. 146 0 0 Problem (3) is equivalent to the original problem (1) as the following theorem states: Theorem 3.1. Problem (1) has a solution if and only if problem (3) has an optimal solution with the corre- sponding zero optimal objective value. Proof. The “only if” part is obvious. For the “if” part let be the optimal solution of problem (3) with corresponding zero optimal objective value, that is ** ,xu *** ,,,d J Fx tx t u t tt . Since the integrand is nonnegative real-valued function, we have *** ,,,Fxtxtutt almost everywhere on , and so almost everywhere ** xt gxtu 0 * ,,tt on , and a * a tx and b * b tx. As td a at txt xs s for t and J t is Lebesgue integrable, t * ,xu will be absolutely continu- ous and therefore is a solution of problem * (1). Thus, the proof is complete. Introducing slack variable vt xt , problem (3) can be expressed as an optimal control problem as fol- lows: min ,,,d s.t. , , , , J aabb xt vt ut tt xt vt tAutUvtV txxtxtJ (4) where , , , and U V are as before. It is easy to show that problems (3) and (4) are equivalent. Consider vt as a new control vector and define ˆut ut vt . Therefore, problem (4) can be rewritten as: ˆˆ min ,,d s.t. ˆ 0I ˆ ˆ , , , J nm nn aabb Fxt ut tt xt, ut xtAut U txxtxtJ (5) where ˆˆ ,, ,,, xt ut tFxt vt ut t nm V R and . ˆ UU Definition 3. 1. The trajectory-control pair in problem (5) is called admissible if the following conditions hold: ˆ , wxu 1) is absolutely continuous on and satisfies , tAtJ. 2) ˆ u is bounded Lebesgue measurable on and takes its values in . ˆ U 3) Boundary conditions aa tx and bb tx are satisfied. 4) The state equation ˆ 0I nm nn t,u t is satis- fied. Let be the set of all admissible pairs. Then, prob- lem (5) (and equivalently (1), (3) and (4)) has a solution when is non-empty. W W Some characteristics of the admissible pairs are as fol- lows. Let ˆ , wxu R be an admissible pair, and be an open ball in containing B1n J . Let ()CB be the space of all real-valued functions that are uniformly continuous on together with their first derivatives. Let B CB and define function as follows: ˆ ,, ,, ˆ ,, , xt tuttxttvtxtt xt ut tCB (6) where ˆ UJ . Also, is in the space C , of real valued continuous functions defined on the com- pact set . Since wx ˆ ,u is admissible pair, for all CB we have: ˆ ,,d ,,d ,d ,, J xt J bb aa J xt ut tt xt tvtxt tt xtttx tx t (7) Note that it is necessary to introduce the set and the space B CB since may have an empty interior in . Now, consider n R j t and as the components of j vt t and vt , respectively. Let be the space of infinitely differentiable real-valued functions with compact support in DJ , ab tt . Define: ˆ ,, 1,2,, , jjj tuttxt tvt t jnDJ (8) Then, if ˆ , wxu is an admissible pair, for 1, 2,,jn and DJ we have: ˆ ,,d d d dd d d0 jjj JJ jjj j J jjj J jJjj J xt ut ttx ttv ttt ttxttxttvtt xt t xt tvt tt t xttxtvtt t t (9) Copyright © 2011 SciRes. ICA  A. JAJARMI ET AL.147 since the function has compact support in , i.e. , and the trajectory and control func- tions in an admissible pair satisfy the state equation in (5). 0 ab tt Now, consider a special choice of function in which depends on the time variable only, i.e. CB , tt t ˆ ,, ut t xt . In the light of (6) we have 1 t C where is a sub- 1 C space of comprised of those continuous functions which depend only on the time variable. In addition, (7) implies that: C 1 ˆ ,,dd ba JJ tutt ttttt C (10) The set of Equalities (7), (9) and (10) are the properties of admissible pairs in the new but classical formulation of the path planning problem. In the next section, by suitable generalization, a transformation into another, non-clas- sical problem is introduced which has better properties in some aspects. 4. Metamorphosis For each admissible pair ˆ ,wxu consider the following well-defined mapping: ˆ :, w J ,d CHxtutttR (11) This mapping is a bounded linear functional on C which is also positive, i.e. w assigns nonnegative val- ues to the nonnegative continuous functions on . Proposition 4.1. Let be continuous on and ut be piecewise continuous on . The transformation from W, the set of admissible pairs , into the space of bounded linear func- tional on is an injection. w w wx ˆ ,u C Proof. It must be shown that if , then . Indeed, if 12 , then by relation (5), 12 11 12 22 ˆˆ ,,wxuw xu ww12 ww x. Since 1 and 2 are continuous, there is a subinterval 1 J such that 12 1 , txt tJ. Now, a continuous function can be constructed such that it is equal zero for all outside 1 t and positive on the appropriate portion of the graph of 1 and zero on that of 2 x . Then, 12 ww H , and the proof is complete. Let be a linear positive continuous functional on . By Riesz representation Theorem, there exists a unique positive Radon measure C on such that: d, HH HHC (12) It is said that is a representing measure for . Let M be the space of all positive Radon measure on . Then, solving problem (5) is equivalent to seek a measure in M , denoted by * , which minimizes the functional: ˆ)() ( F R (13) over the set w Q of the measures , corresponding to the admissible pairs ˆ , wxu , which satisfy: 0, , j f fa 1 , 1, 2,,, CB jnD fC J (14) Existence of the optimal measure * in the set is equivalent to the controllability of problem (1). If is compact, then existing of the optimal measure w Q w Q * is guaranteed, as the map ˆ, w Q , mapping w into the real line, is continuous, where w is con- sidered to have relative topology induced by the topol- ogy of Q Q M . But in general w may not be com- pact. However, if we extend w to the set includ- ing all measures in Q Q Q M which satisfy (14) (not necessarily those measures corresponding to the admis- sible pairs), then the optimal measure * in exists which is shown by the following theorem: Q Theorem 4.1. Let be the set of all posi- tive Radon measure on QM satisfying (14). There exists an optimal measure * in the set for which Q ˆˆ F , for all Q . Proof. It is similar to the proof of Theorem II.1 in [20] and we neglect it. Notice that in this case, which the set w is extended to the set , Q Q* is not necessarily a measure corre- sponding to an admissible pair . w Remark 4.1. Minimization of functional (13) subject to (14) is an infinite-dimensional LP. But it is possible to approximate the solution of this problem by the solution of a finite-dimensional LP of sufficiently large dimension which will be done in the next section. 5. Approximation For the first step of approximation, we consider the measures in M satisfying a finite number of con- straints in (14). To do this, let and 1 :1,2,,kM k 2 ,2,,:1hM h be subsets of some total sets in CB and DJ , respectively (A subset of C B or DJ is total if the linear combinations of its ele- ments be dense in that space). Theorem 5.1. Consider LP consisting of minimizing the function ˆ over the set 12 ,QM M Copyright © 2011 SciRes. ICA  A. JAJARMI ET AL. 148 which is the set of all measures in satisfying: M 1 2 2,, , kM hM , 1, 0, 1,2, kk h (15) Then, as 1 and 2 tend to the infinity, 12 12 , ˆ ,inf QM M MF tends to *ˆˆ inf Q F . Proof. It is similar to the proof of Theorem III.1 in [20]. The above theorem provides the theoretical justifica- tions to approximate the infinite number of constraints by a finite number of them. Now, consider the problem of minimizing (13) over 12 . By Theorem A.5 in [20], the optimal measure of this problem has the fol- lowing form: ,QM M 12 * 1 MM j z j (16) where , j, and 0 j z z is the unitary atomic measure characterized by: zH HzH , ,Cz (17) The above representation of as a combination of unitary atomic measures changes the strange problem of finding a measure in the set 12 ,M , , 1,2,j QM to a problem of finding . 12 , :, jj jj zRz MM If we could reduce this problem to the one in which 12 12 ,, , M zz z are fixed, and unknowns be the non-negative coefficients 12 12 ,,, M, then we would have a finite dimensional LP. This is the second stage of approximation. We can approximate the optimal measure with: * 1 N j j αδ z (18) where 12 and NMM12 ,, , zz z 2 , 1 ,2, , ,2,, 1,2,,L are fixed in a countable dense subset of [20]. Therefore, the fi- nite-dimensional LP problem is: 1 1 1 1 1 ˆ min .. 0 , 1 , 0 , 1,2,, N jj j N jk jk j N jh j j N js js j j Fz st zk zh M fzas jN The function in (19) depends on the time only and is chosen as piecewise constant function as follows: 1 if 1,2,, 0 otherwise s s tJ ts L (20) where 1, sa a tsdtsd and ba tt t dLL . Remark 5.1. Note that should be in 1 C , however in order to avoid the infeasibility of LP problem (19), we have chosen the Walsh functions instead, by the fact that that every continuous function in 1 C can be approximated by a linear combination of these functions. This is, in fact, another step of approximation. Now, by solving LP (19), optimal values of decision variables 12 ,,, are found. The procedure to construct a piecewise constant control function approxi- mating the action of optimal measure is based on the analysis in [20]. Here, we proceed by this approach and construct ˆ ut and ut as piecewise constant func- tions. The state trajectory t is also obtained as the response of nonlinear system in (1) with a a tx to the control ut . As it has been proved in [20], when , the obtaind and ,NM ut t a tend to the exact control function and state trajectory, respectively, in a way that the initial condition a tx is always satisfied and the final condition is going to be satisfied, i.e. bb tx,NM as . Remark 5.2. Referring to Theorem 3.1., the optimal value of objective function in (19) can be considered as a criterion for the total error. After solving (19) if the total error is more than desirable one, it can be improved by increasing the number of variables or constraints M, of the LP problem (19). Therefore, in this approach the accuracy can be improved as fine as desired. N 6. Numerical Example In this section we present a numerical example to show the effectiveness of the proposed approach for solving nonlinear path planning problems with a systematic al- gorithm. Thus, consider the following problem which has too complicated nonlinear term [19]: 2 0.5 sin s.t. 0,1, 0,1 00, 10.5 0, 1 xtxtut xt ut xx J (21) M (19) Step 1. Let 3 10 as permitted error and divide each of , , , and U into 10 parts. Thus, V Copyright © 2011 SciRes. ICA 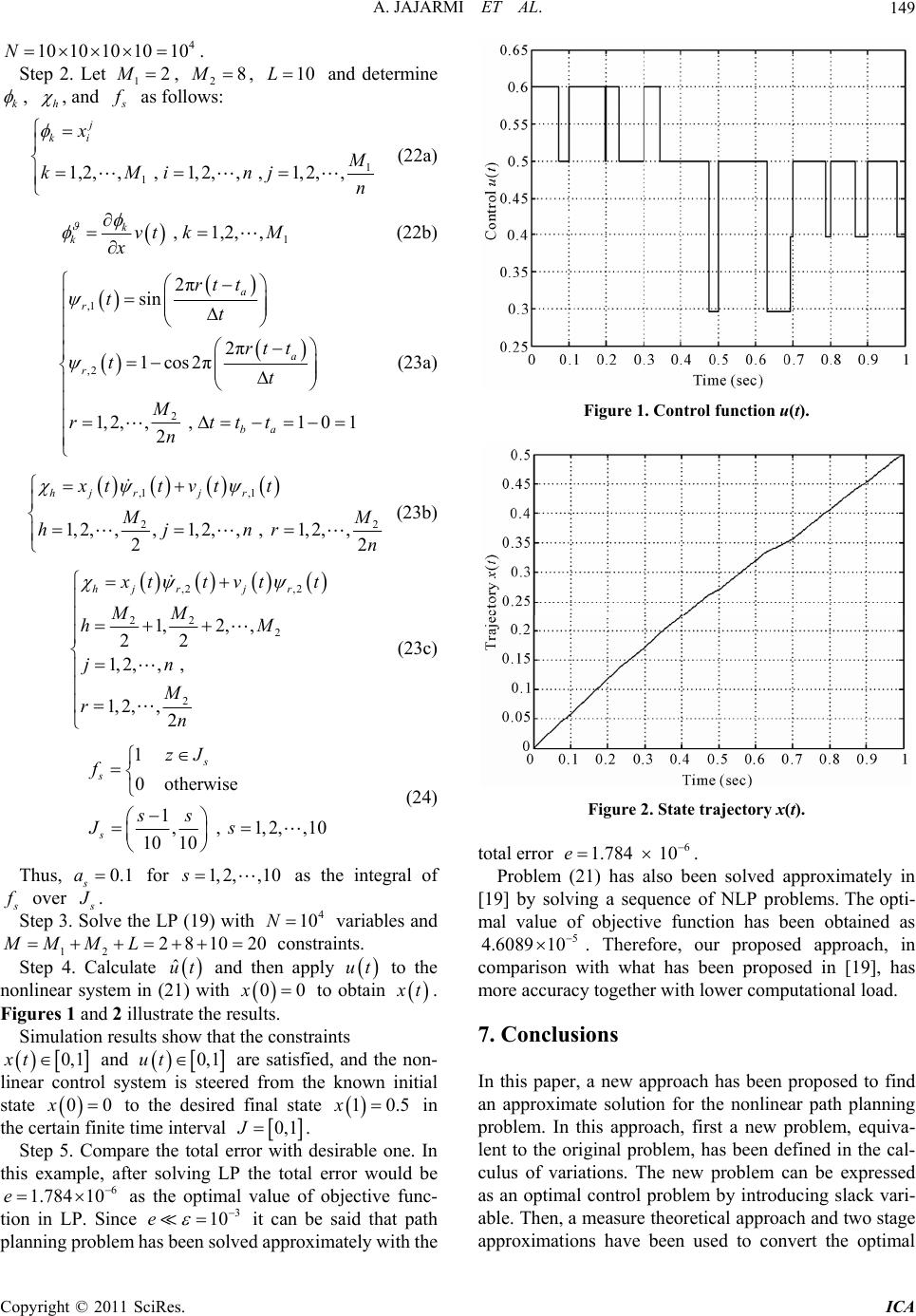 A. JAJARMI ET AL.149 4 10 10 10 1010N 2MM k . Step 2. Let 1, 2, and determine 810L , h , and as follows: 1 1 1,2,, , 1, j ki x 2,, , 1,2,, kMi nj n (22a) 1 , 1,2,, k kvt kM x (22b) ,1 ,2 2 2π sin 2π 1cos2π 1,2,, , 101 2 a r a r ba rt t tt rt t tt M rttt n (23a) ,1 ,1 22 1,2,,,1,2,, , 1,2,, 22 hj rjr xt tvt t M hjnr n (23b) ,2 ,2 22 2 2 1,2, , 22 1,2,, , 1, 2,,2 hj rjr ttvt MM hM jn M rn t (23c) 1 0 otherwise 1, , 1,2,,1 10 10 s s s zJ f ss Js 0 (24) Thus, for as the integral of 0.1 s a1,2,,10s over . Step 3. Solve the LP (19) with variables and constraints. 4 10 20 N 12 Step 4. Calculate and then apply to the nonlinear system in (21) with to obtain 2810MM ML ˆ ut ut 00x t. Figures 1 and 2 illustrate the results. Simulation results show that the constraints 0,1xt and 0, 1ut are satisfied, and the non- linear control system is steered from the known initial state to the desired final state in the certain finite time interval 0x0 10.5x 0,1J. Step 5. Compare the total error with desirable one. In this example, after solving LP the total error would be as the optimal value of objective func- tion in LP. Since 6 1.784 10e 3 10e it can be said that path planning problem has been solved approximately with the Figure 1. Control function u(t). Figure 2. State trajectory x(t). total error 6 1.784 10e . Problem (21) has also been solved approximately in [19] by solving a sequence of NLP problems. The opti- mal value of objective function has been obtained as 5 4.6089 10 . Therefore, our proposed approach, in comparison with what has been proposed in [19], has more accuracy together with lower computational load. 7. Conclusions In this paper, a new approach has been proposed to find an approximate solution for the nonlinear path planning problem. In this approach, first a new problem, equiva- lent to the original problem, has been defined in the cal- culus of variations. The new problem can be expressed as an optimal control problem by introducing slack vari- able. Then, a measure theoretical approach and two stage approximations have been used to convert the optimal Copyright © 2011 SciRes. ICA 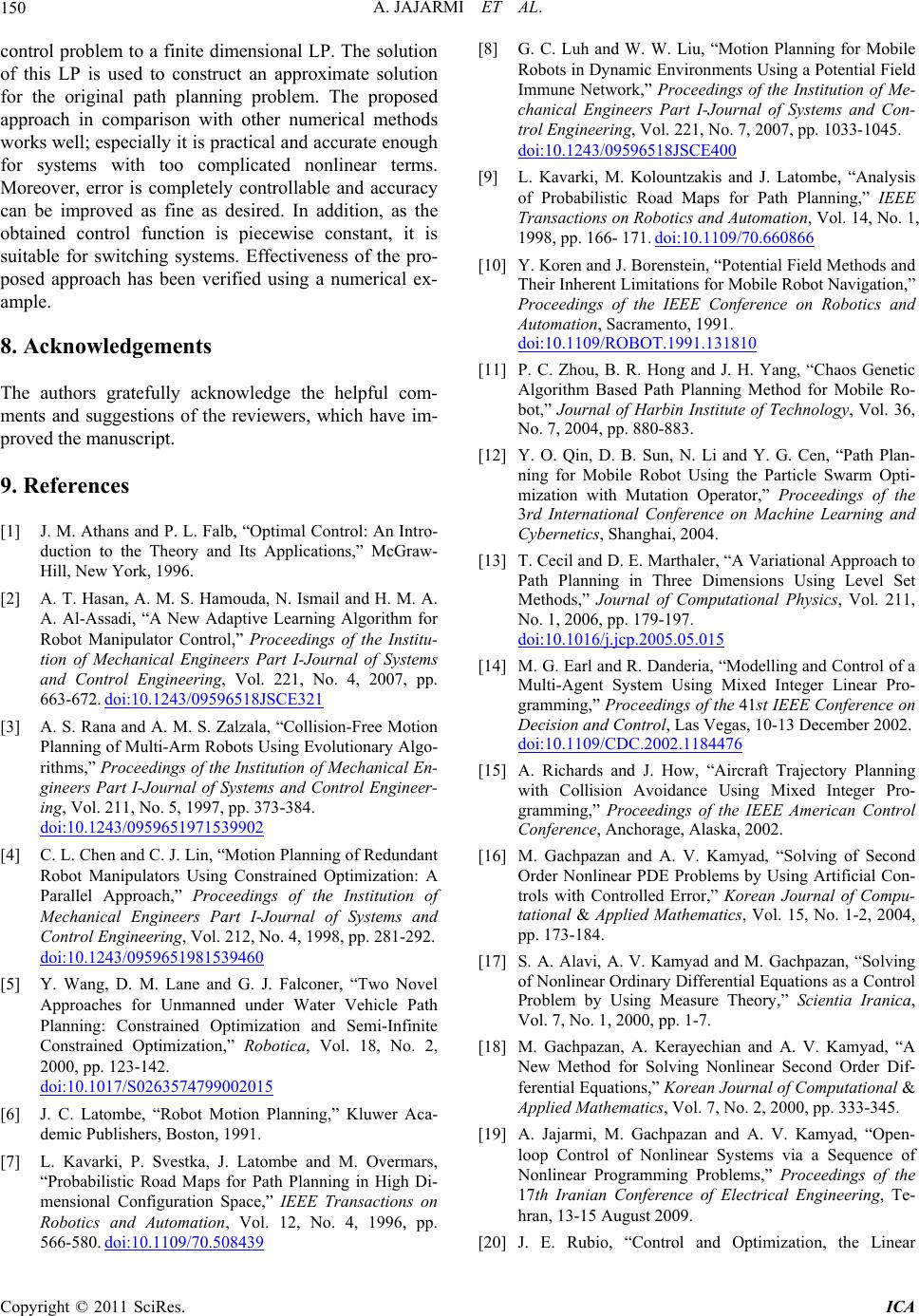 A. JAJARMI ET AL. 150 control problem to a finite dimensional LP. The solution of this LP is used to construct an approximate solution for the original path planning problem. The proposed approach in comparison with other numerical methods works well; especially it is practical and accurate enough for systems with too complicated nonlinear terms. Moreover, error is completely controllable and accuracy can be improved as fine as desired. In addition, as the obtained control function is piecewise constant, it is suitable for switching systems. Effectiveness of the pro- posed approach has been verified using a numerical ex- ample. 8. Acknowledgements The authors gratefully acknowledge the helpful com- ments and suggestions of the reviewers, which have im- proved the manuscript. 9. References [1] J. M. Athans and P. L. Falb, “Optimal Control: An Intro- duction to the Theory and Its Applications,” McGraw- Hill, New York, 1996. [2] A. T. Hasan, A. M. S. Hamouda, N. Ismail and H. M. A. A. Al-Assadi, “A New Adaptive Learning Algorithm for Robot Manipulator Control,” Proceedings of the Institu- tion of Mechanical Engineers Part I-Journal of Systems and Control Engineering, Vol. 221, No. 4, 2007, pp. 663-672. doi:10.1243/09596518JSCE321 [3] A. S. Rana and A. M. S. Zalzala, “Collision-Free Motion Planning of Multi-Arm Robots Using Evolutionary Algo- rithms,” Proceedings of the Institution of Mechanical En- gineers Part I-Journal of Systems and Control Engineer- ing, Vol. 211, No. 5, 1997, pp. 373-384. doi:10.1243/0959651971539902 [4] C. L. Chen and C. J. Lin, “Motion Planning of Redundant Robot Manipulators Using Constrained Optimization: A Parallel Approach,” Proceedings of the Institution of Mechanical Engineers Part I-Journal of Systems and Control Engineering, Vol. 212, No. 4, 1998, pp. 281-292. doi:10.1243/0959651981539460 [5] Y. Wang, D. M. Lane and G. J. Falconer, “Two Novel Approaches for Unmanned under Water Vehicle Path Planning: Constrained Optimization and Semi-Infinite Constrained Optimization,” Robotica, Vol. 18, No. 2, 2000, pp. 123-142. doi:10.1017/S0263574799002015 [6] J. C. Latombe, “Robot Motion Planning,” Kluwer Aca- demic Publishers, Boston, 1991. [7] L. Kavarki, P. Svestka, J. Latombe and M. Overmars, “Probabilistic Road Maps for Path Planning in High Di- mensional Configuration Space,” IEEE Transactions on Robotics and Automation, Vol. 12, No. 4, 1996, pp. 566-580. doi:10.1109/70.508439 [8] G. C. Luh and W. W. Liu, “Motion Planning for Mobile Robots in Dynamic Environments Using a Potential Field Immune Network,” Proceedings of the Institution of Me- chanical Engineers Part I-Journal of Systems and Con- trol Engineering, Vol. 221, No. 7, 2007, pp. 1033-1045. doi:10.1243/09596518JSCE400 [9] L. Kavarki, M. Kolountzakis and J. Latombe, “Analysis of Probabilistic Road Maps for Path Planning,” IEEE Transactions on Robotics and Automation, Vol. 14, No. 1, 1998, pp. 166- 171. doi:10.1109/70.660866 [10] Y. Koren and J. Borenstein, “Potential Field Methods and Their Inherent Limitations for Mobile Robot Navigation,” Proceedings of the IEEE Conference on Robotics and Automation, Sacramento, 1991. doi:10.1109/ROBOT.1991.131810 [11] P. C. Zhou, B. R. Hong and J. H. Yang, “Chaos Genetic Algorithm Based Path Planning Method for Mobile Ro- bot,” Journal of Harbin Institute of Technology, Vol. 36, No. 7, 2004, pp. 880-883. [12] Y. O. Qin, D. B. Sun, N. Li and Y. G. Cen, “Path Plan- ning for Mobile Robot Using the Particle Swarm Opti- mization with Mutation Operator,” Proceedings of the 3rd International Conference on Machine Learning and Cybernetics, Shanghai, 2004. [13] T. Cecil and D. E. Marthaler, “A Variational Approach to Path Planning in Three Dimensions Using Level Set Methods,” Journal of Computational Physics, Vol. 211, No. 1, 2006, pp. 179-197. doi:10.1016/j.jcp.2005.05.015 [14] M. G. Earl and R. Danderia, “Modelling and Control of a Multi-Agent System Using Mixed Integer Linear Pro- gramming,” Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, 10-13 December 2002. doi:10.1109/CDC.2002.1184476 [15] A. Richards and J. How, “Aircraft Trajectory Planning with Collision Avoidance Using Mixed Integer Pro- gramming,” Proceedings of the IEEE American Control Conference, Anchorage, Alaska, 2002. [16] M. Gachpazan and A. V. Kamyad, “Solving of Second Order Nonlinear PDE Problems by Using Artificial Con- trols with Controlled Error,” Korean Journal of Compu- tational & Applied Mathematics, Vol. 15, No. 1-2, 2004, pp. 173-184. [17] S. A. Alavi, A. V. Kamyad and M. Gachpazan, “Solving of Nonlinear Ordinary Differential Equations as a Control Problem by Using Measure Theory,” Scientia Iranica, Vol. 7, No. 1, 2000, pp. 1-7. [18] M. Gachpazan, A. Kerayechian and A. V. Kamyad, “A New Method for Solving Nonlinear Second Order Dif- ferential Equations,” Korean Journal of Computational & Applied Mathematics, Vol. 7, No. 2, 2000, pp. 333-345. [19] A. Jajarmi, M. Gachpazan and A. V. Kamyad, “Open- loop Control of Nonlinear Systems via a Sequence of Nonlinear Programming Problems,” Proceedings of the 17th Iranian Conference of Electrical Engineering, Te- hran, 13-15 August 2009. [20] J. E. Rubio, “Control and Optimization, the Linear Copyright © 2011 SciRes. ICA  A. JAJARMI ET AL. Copyright © 2011 SciRes. ICA 151 Treatment of Non-linear Problems,” Manchester Univer- sity Press, Manchester, 1986. [21] A. V. Kamyad, J. E. Rubio and D. A. Wilson, “An Opti- mal Control Problem for the Multidimensional Diffusion Equation with a Generalized Control Variable,” Journal of Optimization Theory and Applications, Vol. 75, No. 1, 1992, pp. 101-132. doi:10.1007/BF00939908 [22] A. V. Kamyad and A. H. Borzabadi, “Strong Controlla- bility and Optimal Control of the Heat Equation with a Thermal Source,” Korean Journal of Computational & Applied Mathematics, Vol. 7, No. 3, 2002, pp. 555-568. [23] A. H. Borzabadi, A. V. Kamyad and M. H. Farahi, “Op- timal Control of the Heat Equation in an Inhomogeneous Body,” Applied Mathematics and Computation, Vol. 15, No. 1-2, 2004, pp. 127-146. [24] D. Hinrichsen and A. J. Pritchard, “Mathematical System Theory I: Modeling, State Space Analysis, Stability and Robustness,” Springer, Berlin, 2005. [25] A. V. Kamyad and H. H. Mehneh, “A Linear Program- ming Approach to the Controllability of Time-Varying Systems,” International Journal of Engineering Science, Vol. 14, No. 8, 2003, pp. 143-151.
|