 Intelligent Control and Automation, 2011, 2, 133-143 doi:10.4236/ica.2011.22016 Published Online May 2011 (http://www.SciRP.org/journal/ica) Copyright © 2011 SciRes. ICA Identification of Issues in Predicting Multi-Robot Performance through Model-Based Simulations Shameka Dawson, Briana Lowe Wellman, Monica Anderson Department of Computer Science, The University of Alabama, Tuscaloosa, USA E-mail: {dawso003, lowe002}@crimson.ua.edu, anderson@cs.ua.edu Received April 28, 2011; revised May 4, 2011; accepted May 9, 2011 Abstract Predicting the performance of intelligent multi-robot systems is advantageous because running physical ex- periments with teams of robots can be costly and time consuming. Controlling for every factor can be diffi- cult in the presence of minor disparities (i.e. battery charge). Access to a variety of environmental configura- tions and hardware choices is prohibitive in many cases. With the eminent need for dependable robot con- trollers and algorithms, it is essential to understand when real robot performance can be accurately predicted. New prediction methods must account for the effects of digital and physical interaction between the robots that are more complex than just collision detection of 2D or physics-based 3D models. In this paper, we identify issues in predicting multi-robot performance and present examples of statistical and model-based simulation methods and their applicability to multi-robot systems. Even when sensor noise, latency and en- vironmental configuration are modeled in some complexity, multi-robot systems interject interference and messaging latency, causing many prediction systems to fail to correlate to absolute or relative performance. We support this supposition by comparing results from 3D physics-based simulations to identical experi- ments with a physical robot team for a coverage task. Keywords: Intelligent Robots, Multi-Robot Systems, Performance, Prediction, Simulation 1. Introduction Simulations are an important component of software validation. Robot controllers are tested within a simu- lated environment to verify properly coded semantics. Simulation is often used to predict controller perform- ance under a set of constraints. Specifically, the envi- ronment (placement of obstacles, walls, etc.) is varied along with the robot configuration to quantify perform- ance under a more generalized set of parameters. Predic- tion is then generated by gathering average case per- formance data from simulation experiments. Simulations can provide both quantitative and qualitative data which are used to model robot performance in the real world. Getting simulations to predict performance in single robot experiments is challenging. Models do not always capture important factors such as sensor to environment interactions [1,2] and hardware inconsistencies [3,4], causing simulations to perform better or worse than in the real world. This effect is magnified when using more than one robot in a team. Prediction of multi-robot per- formance in simulation is particularly important because of the time and cost involved in acquiring, maintaining, and running multiple robots. If simulations are to be pre- dictive, it is important to understand when simulations accurately predict multi-robot performance. There is a renewed interest in prediction through simulations which is evident by the emergence of new conferences such as Simulation, Modeling, and Pro- gramming for Autonomous Robots (SIMPAR). SIMPAR was first introduced in 2008 to “identify and solve the key issues necessary to ease the development of increas- ingly complex robot software and to boost a smooth shifting of results from simulated to real applications” [5]. It is rare that there is a seamless migration of code from simulators to real world systems because of the complexity of modeling mechanics (sensors) and interac- tions with real environments. In this article, we investigate the factors that affect the ability of statistical and model-based simulation to pre- dict multi-robot performance. Specifically, we survey the factors that affect the accuracy of multi-robot simulations (Section 2). We discuss both statistical and model-based methods of predicting performance in multi-robot teams  S. DAWSON ET AL. 134 (Section 3). In Section 4, we examine validation tech- niques in a recent robotics conference. A comparison between robotics experiments and physics-based simula- tions is presented in Section 5. The article concludes with Section 6. 2. Using Simulations to Predict Performance Many researchers use a behavior-based decomposition [6] that layers task achieving behaviors such as obstacle avoidance and wander. A behavior-based robot is de- signed to operate in dynamic environments because its reactions are determined by what is sensed without nec- essarily modeling the environment structure that pro- vides the sensor readings. As it senses the environment, it computes what it senses, and acts on what is computed (see Figure 1). This structure often includes higher-level behaviors that are not purely reactive that model and hold states such as mapping and path planning. Uncertainty is introduced in the behavior-based model in several ways: sensor noise, latency, and the environ- ment. Sensor noise is a random error that causes sensor readings to vary against the expected values. Since the robot uses sensor data directly to calculate actions, sen- sor noise can affect the choice of appropriate behaviors. Latency is the delay between sensing and acting. In a mobile robot system, latency is injected because of the delay between sensing, computation time, and execution time. Latency can affect performance if robot behaviors are not executed in a timely manner. In addition, as the environment’s lighting and surfaces change, sensors in- teract differently, often in unmodeled ways. Melhuish et al. [1] performed a patch sorting study in both simulation and a real multi-robot system using minimalist robots. Simulation produced better performance than real robot experiments, primarily because the actual infrared sen- sors encountered difficulties in changing lighting condi- tions. Multi-robot experiments include additional factors such as interference, message loads and communication bandwidth that affect performance. Interference occurs when multiple robots try to occupy the same space caus- ing robots to expend time and energy maneuvering around each other. Message passing (via a network) can also affect performance by requiring computational re- sources to produce and process data. Figure 1. Intelligent mobile robots are traditionally structured using a behavior-based approach. When multiple robots in- teract, new sources of discrepancy, such as message production and processing, can cause simulations to vary from experi- ents. m Copyright © 2011 SciRes. ICA  S. DAWSON ET AL. Copyright © 2011 SciRes. ICA 135 2.1. Sensor Noise Prior work indicates that researchers are concerned with how sensor noise affects the correlation between simula- tion and physical experiments. This is because sensor data is noisy and the range, reflectance, and other pa- rameters of real sensors are limited [7]. For instance, Balch and Arkin [8] conducted experiments in formation control of multiple robots in simulation and with real robots. They determined that the differences between the experiments were primarily due to sensor noise and posi- tional inaccuracies. In a task allocation experiment [9], Mataric found that the exact behavior in a nondeterministic world is impos- sible to predict exactly because it is subject to real error and noise. In other studies [10,11], experiments were performed using multiple coordinating robots using dif- ferent task allocation strategies focusing on noise and uncertainty. They showed that no single strategy pro- duces the best performance in all cases and that the best strategy changes as a function of noise in the system. Other researchers found that too little, too much, or in- accurate noise in simulation creates unrealistic or non- transferable systems [12,13]. In some instances, sensors are dependent upon each other. In [14], Meeden found that there is a correlation between certain sensors. A hybrid model was developed that combined both independent and dependent sensor noise to account for different amounts of correlation. They used a Khepera robot with light sensors to test their model. They found that real world noise is not inde- pendently random for certain sensors but displays syn- chrony. Their results imply that the hybrid noise model transfers better from simulation to the real world than an independent noise model. In [15,16], a description and evaluation of mobile ro- bot motion in simulation was presented. It was found that problems in robot motion arise due to unexpected uncer- tainty of motion and sensor error. It was noted that some simulators pay little attention to the fact that uncertainty is inevitable. 2.2. Latency Latency is another factor that many researchers neglect when modeling. In one study, Balch and Arkin [8] pre- sent reactive behaviors using formations in robot teams in simulation, on real robots, and Unmanned Ground Vehicles (UGVs). They determine that latency and posi- tion error in transmission of positional information can negatively impact performance. They show that in simu- lation there was no position error or communication la- tency, while experiments on real robots and UGVs ex- perienced 1 s and 7 s communication latency, respec- tively. Go et al. [17] present a simulation framework for vi- sion-centric robots and conjecture that a key element of simulation is latency modeling. However, they state that the effects of latency are often ignored in simulations. They go on to state that unaccounted latency in simula- tion sensing and actuation leads to differences in simu- lated and real results. Likewise, in a recent paper, Seo et al. [16] mention that simulators do not consider uncer- tainties in latency. 2.3. Environment The environment and robot-environment interaction are hard to accurately model in simulation. Brooks [18] states that there is a vast difference between simulated and real robots and their interaction with the environ- ment. It is also noted that programs that work on simu- lated robots may fail on real robots because of differ- ences in real world sensing and actuation because it is hard to simulate dynamics of the real world. Gat [19] states that there is an inadequate basis for predicting the reliability and behavior of robots operating in unengineered environments. Interaction with complex environments is difficult to model because of independ- ent variables which are often ignored. In addition, design of control systems for robots operating in complex, dy- namic, uncertain environments will become more diffi- cult as the complexity of behaviors increases [20]. In an experiment on tracking targets [21], it was dis- covered that the characteristics of the environment affect system performance. For instance, the shape of the envi- ronment and how obstructed it is shown to be significant. Furthermore, Smith [22] stated that robot interaction with walls in an environment is extremely hard to model accurately. This may be a result of different surface properties of walls. Rosenfeld et al. [23] determined that the physical en- vironment where robot teams operate pose challenges for robots to perform properly. They created adaptive coor- dination techniques and found that techniques should be adjusted to match different environmental conditions. In experiments on cooperation strategies [24], it was determined that the environmental configuration had the greatest impact on the speed and success of robot search. Balaguer et al. [25] state that robots are complicated sys- tems composed of interacting units, each characterized by its own behaviors and errors and that robots' observed behaviors depend on the environment along with the software and hardware. Balakirsky et al. [26] determined that a combination of robot parameters, diverse terrain, and high variability in  S. DAWSON ET AL. 136 sensor readings and error rates create dynamic environ- ments that are hard to accurately replicate in simulation. They state that the inherent complexities of robotic en- vironments may introduce significant differences be- tween real and simulated environments. They go on to say that algorithm development on a simulation assumes that information about the environment is accurate, but the complexity of the operating environment can be daunting and variables about terrain characteristics may be omitted or ignored. 2.4. Interference In multi-robot experiments, robot interference has a ma- jor impact on performance. Gerkey and Mataric [27] suggest that a common externality in multi-robot systems is physical interference. They state that interference is often ignored or crudely modeled when estimating utili- ties, but have complex and unpredictable effects that may easily dominate performance. Other researchers [28,29] also determined that the number of robots has an impor- tant impact on system performance due to physical in- terference. In a discussion on collective agents [9], it was found that interference increases as the size of the group grows which causes a decline in global performance. They state that the global consequence of local interaction between robots is difficult to predict. Martinoli and Mondada [30] performed parametric simulations and real experiments for a clustering task using multiple robots. They found that the main differ- ence is that the performance of a team of three real ro- bots is less rapidly saturated than in simulation. In ex- periments with more robots, there was a substantial sub- linearity because of interference and team fitness be- comes saturated because of interference. Rosenfeld et al. [31] studied how the productivity of robots scales with group size in a foraging experiment. They found a negative correlation between group pro- ductivity and interference using 1 to 30 robots in simula- tions. They show that various coordination methods af- fect the productivity of team performance. An investigation on multiple robots in odor source lo- calization in simulation was performed by Lochmatter and Martinoli [32]. In their study, they compare per- formance of a single robot to that of a group of 2 or 5 non-cooperating robots. While they expected the multi- robot experiments to perform significantly better than the single robot experiments, they found some of the results comparable. In addition, they found a significant differ- ence in one algorithm where performance decreased as the number of robots increased. They conclude that the loss in performance result from interference amongst robots. 2.5. Message Passing and Communication Bandwidth When multiple robots cooperate, message passing and communication bandwidth may impact system perform- ance. Since robot cooperation often requires communica- tion, the bandwidth can grow with the number of robots [9]. Rybski et al. [33] show that limited communication bandwidth constricts the effective team size in a surveil- lance task using real miniature robots. They state that performance depends on the number of robots that share the bandwidth and that the system degrades under in- creased loads. Lerman et al. [34] determined that as the size of a multi-robot system grows, the complexity of design ap- proaches also increases. This increase is due to increased communication bandwidth and computational abilities of robots. In [24], coordination strategies were examined using simulation and physical experiments. They show that explicit coordination methods decrease performance as the number of robots increase because of the limited communication bandwidth and computational require- ments when dealing with multiple robots. They also de- termined that message exchange affects performance and scales with team size. They suggest that methods that rely on reliable network connections have limited appli- cability in the real world. 3. Predictive Models of Behavior-Based Controllers There are two kinds of predictive models in use: statisti- cal analysis and simulated. Statistical models consider the transitions between states. Simulated models use representations of robots and the environment to trace execution of particular controllers. Simulations can be numerical or can use a specialized package. 3.1. Statistical Models Lerman and Galstyan [29] presented a mathematical model of a group of robots in a foraging task. Robots searched an enclosed obstacle-free area to retrieve pucks. The foraging task consists of five states (see Figure 2): search for pucks, collect pucks, go home, reverse homing, and avoid collisions. For analysis, the behavior is simpli- fied to two states: searching (including searching and collecting pucks) and avoiding. Using the rates of detecting a puck, αp, or another robot, αr, the number of robots in eah state could be calculated c Copyright © 2011 SciRes. ICA  S. DAWSON ET AL. Copyright © 2011 SciRes. ICA 137 Figure 2. Lerman and Galstyan simplify the behavior-based puck collection to two states for analysis. 3.2. Model-Based Simulation Packages and the collection of pucks could be predicted. Interfer- ence, modeled as 0 0 s rs s rs s dN tNt NtN dt Nt NtN (1) Specialized packages either rely upon kinematics or physics-based simulations. A kinematics simulation fo- cuses on motion without reference to the force or mass that causes it. Kinematics simulators are usually fast be- cause they use ray tracing for collision detection and sensor modeling [36]. The simulation is rendered into a grid and collisions between blocks in the grid and the sensor data are computed using ray tracking. Ray tracing involves using a line-drawing algorithm to determine if a ray intersects a block in the grid. describes robots that detect another robot in searching state or in the avoid state and begin the avoiding maneu- ver where τ is the avoiding time period if they detect an obstacle. Ns(t) is the number of robots in the search state at time t, Na(t) is the number of robots in the avoid state at time t, and N0 is the total number of robots. The col- lection of pucks is modeled by Physics-based simulations take force and mass into consideration and produce higher fidelity simulations. They often use a physics engine, such as Open Dynamics Engine (ODE) [37] that consists of a rigid body dynam- ics simulation engine and a collision detection engine. The physics engine allows the simulation of properties such as friction, velocity, and mass. While kinematics simulators are faster, an advantage of physics-based simulations is that they are thought of as more accurate and may prevent physically inaccurate situations due to inconsistencies between the real and simulated world [38]. However, physics-based simulations still include minor differences that can accrue over time and result in different behaviors from the real world [39]. ps dM tNtMt dt (2) where M(t) is number of uncollected pucks at time t. From these equations, both efficiency (the time it takes to collect 80% of the pucks) and interference (amount of time spent avoiding) is calculated. They validate their model by comparing its predictions to results from Player/Stage [35]. They showed that while increasing group sizes reduces task completion time, the improve- ment is only sub-linear and the individual robot’s per- formance is a monotonically decreasing function of group size. They found that interference can significantly affect group performance and that there was an optimal group size that maximizes team performance. Robot and sensor models are crucial to accurate simu- lation because they provide the basis for robot perception. Robot models detail many aspects of the physical robot that it is modeling, such as specifications about the robot (mass, friction, size, etc.). Since sensor output includes some amount of error, sensor models often include un- certainty and are adjusted to different levels of noise [16]. Figure 3 shows how a Pioneer robot is modeled in differ- ent simulators. We present representative (not exhaustive) Lerman and Galstyan state that their model agrees with the simulations. However, they used probabilities for situational events specific to the environment which are best identified empirically. They note that the model depends only on present state and not past states and cannot take into account complex decision making.  S. DAWSON ET AL. 138 Figure 3. Images of a pioneer robot model in reality (top left), stage (top right), stage from top view (bottom left), and webots (bottom right). set of packaged simulators and discuss their approach to modeling interaction. 3.3. Stage Stage [36] is a 2.5D, kinematics simulator that runs on UNIX-like platforms. It is an open source, community free software that simulates large populations of robots. As of January 2010, Stage has been downloaded 60,337 times. Stage also interfaces with Player [35], a robot de- vice server, to allow for easy transfer to real robots. It is aimed at being efficient and configurable rather than highly accurate. So, it provides simple, computationally cheap models of robots (modeled as polygon blocks) and devices, such as various sensors and actuators, that are more general than actual hardware. Stage provides fairly coarse-grained sensor models. For instance, odometry (used to measure position based on integrating wheel movements over time) models error, E, for x, y, and Θ by choosing a value from –E/2 to E/2 at startup for use during the lifetime of the simulation. For collision detection, ray tracing is used to compute colli- sions between blocks and the range sensor data. It uses the velocity of a moving object and compares its current position to its next position using the updatePose func- tion. It then reports a collision if ray tracing determines an intersection with another object in that range using the TestCollision and Raytrace functions. However, it does not detect collisions on the z-axis. Collision detection is reported to be accurate to 0.02 m which is the spatial resolution of the ray tracing engine. 3.4. Gazebo Gazebo [40] is a 3D multiple robot simulator with dy- namics that runs on UNIX-like platforms. Gazebo is also Player compatible. It is free software designed for out- door environments and is capable of simulating a small population of robots with high fidelity. As of January 2010, Gazebo has been downloaded 22,329 times. It at- tempts to generate realistic sensor feedback based on provided parameters on lighting, surface reflectance, and friction. Rigid body physics allow robots to interact with objects based on provided robot/sensor models. Movement error is modeled by friction and slip noise, adjusting through the mu1 and slip parameters. Gazebo uses ODE to simulate collision detection. The Ra ySensor and Ray Geom classes are used to cast rays, test for inter- section, and report the range to an object. Geoms (types of geometries) are associated with objects to get the po- sition and orientation from the geom to the object. 3.5. USARSim USARSim [41] is an open source, high fidelity simulator intended for research in human-robot interaction and multi-robot coordination. It is platform independent and runs on Windows, Linux, and Mac OS. USARSim builds upon the widely used game engine, Unreal Engine. It provides 3D rendering and physical simulation. It fea- tures the simulation of multiple sensors and actuators. USARSim uses the Karma physics engine for collision detection. Like other physics-based simulators, it uses mass, friction and linear and angular damping to actuate objects against external and internal forces. Karma phys- ics engine does not document any specific parameters for interjecting error into a simulation. 3.6. Webots Webots [42] is a 3D, physics-based mobile robot simu- lator that is both kinematics and physics-based. Webots is a commercial product that can run on multiple operat- ing systems such as Windows, Linux, or Mac OS X. Webots is used by more than 700 universities and re- search centers worldwide. Webots allows users to define and modify robotics setup and define properties (texture, friction, mass, etc.) to objects. It also allows users to im- port their own 3D models and create complex environ- ments using OpenGL technology. The ODE library is utilized to create accurate physics simulations. The differential wheel model in Webots is used to represent any robot with two wheel differential steering. The model include encoderNoise which adds noise to the incremental encoders (counters that incre- ment each time a wheel turns) and encoderResolution which defines the number of encoder increments per radian. The actual speed is computed from the angular Copyright © 2011 SciRes. ICA  S. DAWSON ET AL.139 speed of each wheel, the wheel radius, and the noise. Webots uses ODE for collision detection where compo- nents of a robot are associated with a bounding object. The bounding object defines the shape used for collision detection. A ray casting algorithm is used to detect colli- sions between a sensor ray and a Solid node (a group of shapes) where the intersection between two bounding objects is calculated. Force is then generated upon con- tact on the solids. 4. Experiments in Robotics In order to better understand the type of experiments that are being implemented, an examination of experimental methods used in papers from the 2010 IEEE Interna- tional Conference on Robotics and Automation was per- formed. The methodology for counting the experiments consisted of examining the papers in the conference pro- ceedings to determine the type of experiments the re- searchers performed. The findings from this inquiry are presented in Figures 4 and 5. The experiments were broken into four categories: real, simulation, dataset, and combination. The real experi- ments were those implemented with actual hardware or robot platforms, which included real robots, manipula- tors, etc. The simulation category consisted of experi- ments conducted with a simulator or theoretical or mathematical modeling. In addition, some cases used a combination of both real and simulated experiments. The last category is where datasets of real or simulated data obtained from data set repositories were used. While there are many known issues with simulations, we found that they are still a primary means of validation. Approximately 29% of researchers still rely on only simulated results. However, more than 50% of multi- robot experiments were conducted in simulation. 5. Using Simulations to Predict Experimental Performance in an Exploration Task Our research focuses on exploring predictive models based on simulation results within multi-robot experi- ments. Certainly sensor error, latency and environment all affect team performance since team performance is an aggregation of individual performance in some ways. However, we conjecture that there are important factors specific to multi-robot systems that affect performance in real robots differently than in simulation. The predictability of physics-based simulations for multi-robot coverage tasks was summarized in [43] and [44]. In this article, we expand the presentation of results and analysis. To understand the impact of each factor, we Figure 4. Validation approach in a 2010 robotics conference for all papers. Figure 5. Validation approach in a 2010 robotics conference for multi-robot papers. compared performance in simulations and real experi- ments using different environmental configurations and cooperation paradigms in a coverage task. Robots each perform frontier exploration [45] where none of the ro- bots know the topology of the environment a priori. Teams can either communicate progress in the form of areas that have been explored, Direct Comm, or perform the exploration without knowledge of the actions or findings of other robots, No Comm. The control program, written in the C, was essentially the same for both the simulated and real experiments. K-team Koala robots were used for the physical ex- periments. The robots were equipped with a Hokuyo URG laser range finder with a range of 2 m. Also, a Hagisonic StarGazer Localization System was used to mitigate sensor error. The robots were also equipped with a Dual Core 1.6 GHz machine running Ubuntu with 2 GB of RAM. The simulation environment used was Webots [42], a 3-D physics-based mobile robot simulator. The robots used global positioning sensor (GPS) for localization as Copyright © 2011 SciRes. ICA  S. DAWSON ET AL. 140 well as a laser range finder with a 2 m range. The simu- lations were performed on a Dual Core 2.33 GHz Linux machine with 2 GB of RAM. A wheel encoder noise (based on a Gaussian distribution) was added in simula- tion to compensate for error in the real world. Average coverage times over five runs for the real ex- periments and 20 runs for simulation are presented for a three robot team (see Table 1) in six environments (see Figure 6). The environments were chosen to represent different types of outdoor areas. The robot speeds, envi- ronmental configuration and controller programs were identical between simulation and experiments. We mod- eled sensor latency (based on empirical testing) and sen- sor error (percentage determined by empirical testing). In terms of prediction, ideally the simulations would predict the amount of time needed for coverage. The simulations completed on average 1.5 times faster than the experiments. However, prediction can be useful if we can deduce relative performance in comparisons. Unfor- tunately, relative performance is different between simu- lation and experiments. For example, in environment 2 the simulations show that the cooperation paradigm has little effect on the time-to-cover. However, in experi- ments, the lack of cooperation paradigm causes the time-to-cover to increase by 50%. In addition, after per- forming a t-test, we found that there was a statistical dif- ference (p = 0.041) between the time-to-cover results from the simulation and experiments in the No Comm experiments. So, to really understand the predictive abil- ity of physics-based simulations in this multi-robot task, we must consider interference and message processing individually. 5.1. Interference A summary of interference results are in Table s 2 and 3. Interference in real experiments occurs more frequently and lasts longer than in simulation. No Comm experi- ments resulted in more interference than Direct Comm experiments. Moreover, the time-to-cover difference between real and simulation experiments correlates to total time interfering (r = 0.77). In Direct Comm experi- ments, interference within real experiments is reduced, although simulated interference is not considerably dif- ferent between the two paradigms. The difference be- tween the time-to-cover for the real and simulated results is uncorrelated to total time interfering (r = 0.0645) when interference is managed with communications based co- operation. These findings suggest that unmodeled inter- ference can affect how well simulations approximate performance of multi-robot experiments. If we consider environmental configuration, simulation in open envi- ronments was found to be less predictive than in more Figure 6. Six 6 m × 6 m environmental configurations used in a coverage task. Table 1. Average time to complete 90% coverage (in sec). No Comm Direct Comm Env Real Sim Diff Real Sim Diff 1 213.8107.5106.3 220.3 99.5 120.8 2 185.893.5 92.3 121.8 80.5 41.3 3 230.1182.547.6 149.1 86.2 62.9 4 261.8202.559.3 212.1 188.024.1 5 132.686.5 46.1 64.3 40.5 23.8 6 220.1180.040.1 133.6 88.0 45.6 cluttered environments which has implications for ex- periments of outdoor environments. 5.2. Message Passing Interference can be reduced through a cooperation para- digm that reduces the likelihood that robots will attempt to occupy the same space. However, even if interference is low (Direct Comm in environments 2 and 3), phys- ics-based simulations are still not predictive of experi- mental results. An additional factor to consider is the inconsistency of message latency. Table 4 shows the latency between two sets of experiments. Low Message Volume communicates information between robots only when no previous communication has addressed the newly found area. High Message Volume updates infor- mation on an area whenever that area is encountered, producing more messages that should adversely affect latency. Although average latency is not drastically dif- ferent, the variance in latency is much larger for real ex- periments. Simulation does a poor job of reproducing the inconsistency in latency that can affect performance in real robots. Table 5 shows that time-to-cover in the real robot experiments is longer and all the real experiments xperience much higher variance. e Copyright © 2011 SciRes. ICA 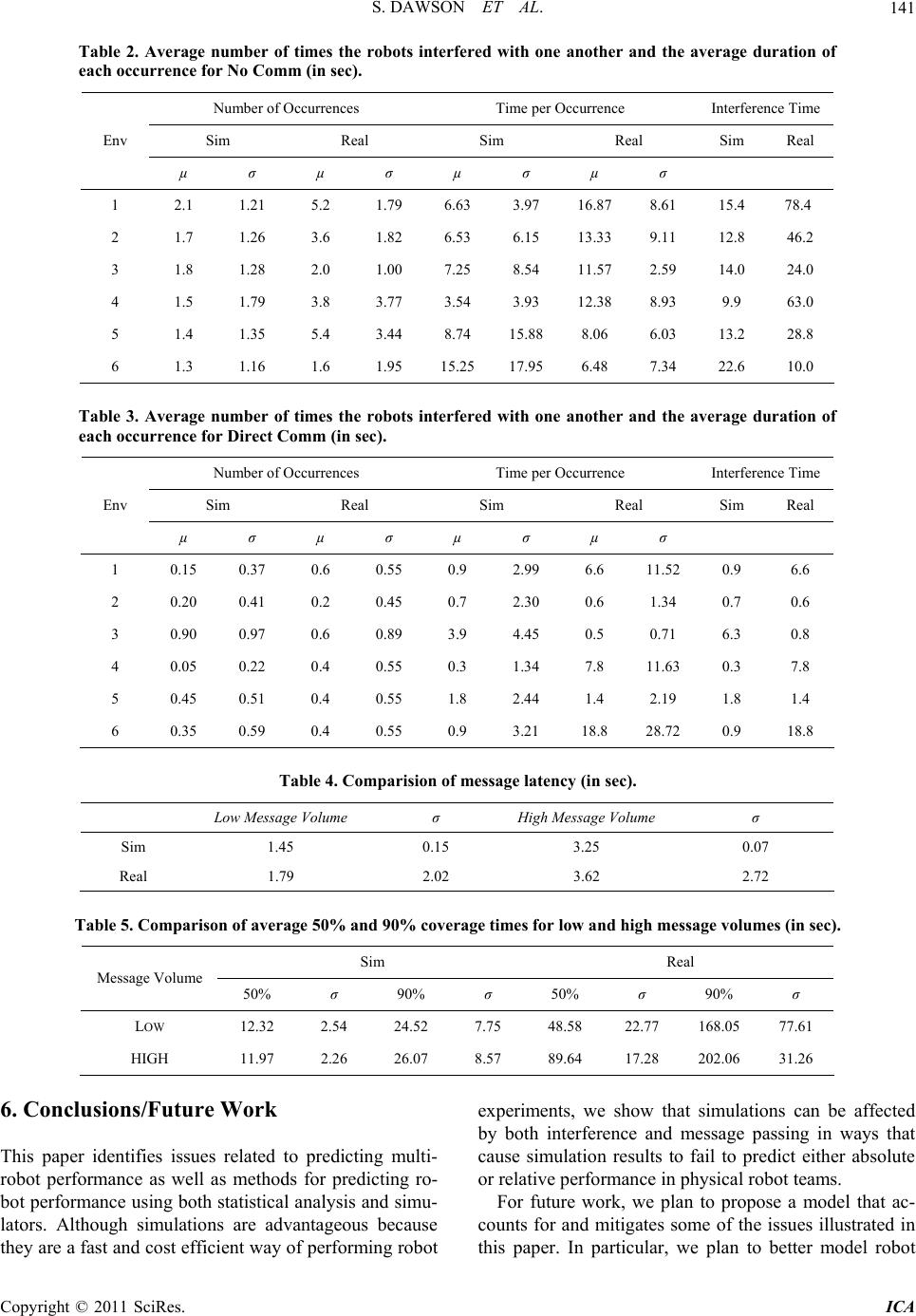 S. DAWSON ET AL. Copyright © 2011 SciRes. ICA 141 Table 2. Average number of times the robots interfered with one another and the average duration of each occurrence for No Comm (in sec). Number of Occurrences Time per Occurrence Interference Time Sim Real Sim Real Sim Real Env µ σ µ σ µ σ µ σ 1 2.1 1.21 5.2 1.79 6.63 3.97 16.87 8.61 15.4 78.4 2 1.7 1.26 3.6 1.82 6.53 6.15 13.33 9.11 12.8 46.2 3 1.8 1.28 2.0 1.00 7.25 8.54 11.57 2.59 14.0 24.0 4 1.5 1.79 3.8 3.77 3.54 3.93 12.38 8.93 9.9 63.0 5 1.4 1.35 5.4 3.44 8.74 15.88 8.06 6.03 13.2 28.8 6 1.3 1.16 1.6 1.95 15.25 17.95 6.48 7.34 22.6 10.0 Table 3. Average number of times the robots interfered with one another and the average duration of each occurrence for Direct Comm (in sec). Number of Occurrences Time per Occurrence Interference Time Sim Real Sim Real Sim Real Env µ σ µ σ µ σ µ σ 1 0.15 0.37 0.6 0.55 0.9 2.99 6.6 11.52 0.9 6.6 2 0.20 0.41 0.2 0.45 0.7 2.30 0.6 1.34 0.7 0.6 3 0.90 0.97 0.6 0.89 3.9 4.45 0.5 0.71 6.3 0.8 4 0.05 0.22 0.4 0.55 0.3 1.34 7.8 11.63 0.3 7.8 5 0.45 0.51 0.4 0.55 1.8 2.44 1.4 2.19 1.8 1.4 6 0.35 0.59 0.4 0.55 0.9 3.21 18.8 28.72 0.9 18.8 Table 4. Comparision of message latency (in sec). Low Message Volume σ High Message Volume σ Sim 1.45 0.15 3.25 0.07 Real 1.79 2.02 3.62 2.72 Table 5. Comparison of average 50% and 90% coverage times for low and high message volumes (in sec). Sim Real Message Volume 50% σ 90% σ 50% σ 90% σ LOW 12.32 2.54 24.52 7.75 48.58 22.77 168.05 77.61 HIGH 11.97 2.26 26.07 8.57 89.64 17.28 202.06 31.26 6. Conclusions/Future Work This paper identifies issues related to predicting multi- robot performance as well as methods for predicting ro- bot performance using both statistical analysis and simu- lators. Although simulations are advantageous because they are a fast and cost efficient way of performing robot experiments, we show that simulations can be affected by both interference and message passing in ways that cause simulation results to fail to predict either absolute or relative performance in physical robot teams. For future work, we plan to propose a model that ac- counts for and mitigates some of the issues illustrated in this paper. In particular, we plan to better model robot  S. DAWSON ET AL. 142 interaction in simulation. We will explore the idea that significant discrepancy between simulated and real cov- erage experiments results from physical interference be- tween robots. The methodology for this research is to use a frontier-based algorithm for coverage where a team of robots recursively explores an unknown area while building a cellular representation. We anticipate that the exploration algorithm might create different forms of interaction between robots. Since each robot maintains its own individual list of frontiers to explore, robots may choose to explore the same frontier thus competing for long durations of time. Conversely, robots may choose to search adjacent areas and only interact with other robots in passing for a shorter length of time. Robots may also encounter other robots directly and try to avoid each other if they are on the same path but headed in different directions. Therefore, we are more precisely modeling different forms of physical robot interaction. Interaction can be categorized as competing and passing. We define com- peting interaction as robots trying to occupy the same space when they have proximal goals. Passing interac- tion is when robots briefly interact with each other when trying to approach different goals. We also plan to quan- tify how obstacles either assist with cooperative coverage (Environment 6) or hinder cooperative coverage (Envi- ronment 4). Specifically, we plan to focus on three types of environments: open areas, convex environments, and concave environments. 7. Acknowledgements The authors gratefully acknowledge the support of the following NSF grants: IIS-0846976 and CCF-0829827. 8. References [1] C. Melhuish, M. Wilson and A. Sendova-Franks, “Patch Sorting: Multiobject Clustering Using Minimalist Ro- bots,” Proceedings of 6th European Conference on Ad- vances in Artificial Life, Springer, 2001. [2] A. T. Hayes, A. Martinoli and R. M. Goodman, “Com- paring Distributed Exploration Strategies with Simulated and Real Autonomous Robots,” Proceedings of the 5th International Symposium on Distributed Autonomous Robotic Systems (DARS’00), Springer Verlag, Berlin, 2000. [3] A. Boeing, S. Hanham and T. Braunl, “Evolving Autonomous Biped Control from Simulation to Reality,” Proceedings of International Conference on Autonomous Robots and Agents (ICARA’04), 2004. [4] K. Easton and A. Martinoli, “Efficiency and Optimization of Explicit and Implicit Communication Schemes in Col- laborative Robotics Experiments,” Proceedings of the IEEE International Conference on Intelligent Robots and Systems, 2002. doi:10.1109/IRDS.2002.1041693 [5] “SIMPAR,” 2008. http://www.simpar.org/. [6] R. Brooks, “A Robust Layered Control System for a Mo- bile Robot,” IEEE Journal of Robotics and Automation, Vol. 2, No. 1, 1986, pp. 14-23. doi:10.1109/JRA.1986.1087032 [7] M. Brady and H. Hu, “Software and Hardware Architec- ture of Advanced Mobile Robots for Manufacturing,” Journal of Experimental and Theoretical Artificial Intel- ligence, Vol. 9, 1997, pp. 257-276. doi:10.1080/095281397147112 [8] T. Balch and R. C. Arkin, “Behavior-Based Formation Control for Multirobot Teams,” IEEE Transactions on Robotics and Automation, Vol. 14, No. 6, 1999, pp. 926- 939. doi:10.1109/70.736776 [9] M. J. Mataric, “Issues and Approaches in Design of Col- lective Autonomous Agents,” Robotics and Autonomous Systems, Vol. 16, 1995, pp. 321-331. doi:10.1016/0921-8890(95)00053-4 [10] M. J. Mataric, G. S. Sukhatme and E. H. Ostergaard, “Multi-Robot Task Allocation in Uncertain Environ- ments,” Autonomous Robots, Vol. 14, No. 1, pp. 255-263, 2003. doi:10.1023/A:1022291921717 [11] E. H. Ostergaard, M. J. Mataric and G. S. Sukhatme, “Multi-Robot Task Allocation in the Light of Uncer- tainty,” IEEE International Conference on Robotics and Automation, Washington DC, 11-15 May 2002. [12] N. Jakobi, P. Husbands and I. Harvey, “Noise and the Reality Gap: The Use of Simulation in Evolutionary Ro- botics,” Proceedings of 3rd European Conference on Ar- tificial Life, Springer-Verlag, Berlin, 1995. [13] M. Mataric and D. Cliff, “Challenges in Evolving Con- trollers for Physical Robots,” Robotics and Autonomous Systems, Vol. 19, No. 1, 1996, pp. 67-83. doi:10.1016/S0921-8890(96)00034-6 [14] L. Meeden, “Bridging the Gap between Robot Simula- tions and Reality with Improved Models of Sensor Noise,” In Proceedings of the Third Annual Genetic Pro- gramming Conference, 1998. [15] N. Y. Ko, D. J. Seo, G. J. Kim, Y. Moon and Y. Bae, “Simulation of Mobile Robot Motion Considering Un- certainties in Robot Model,” IEEE International Confer- ence on Industrial Informatics, Daejeon, 4 December 2008. [16] D. J. Seo, N. Y. Ko, G. J. Kim, Y. Moon, Y. Bae and S.-W. Lim, “Performance Evaluation of Robot Motion Incorporating Uncertainties in Sensors and Motion,” Next-Generation Applied Intelligence, Springer, Berlin, 2009, pp. 271-280. doi:10.1007/978-3-642-02568-6_28 [17] J. Go, B. Browning, and M. Veloso, “Accurate and Flexi- ble Simulation for Dynamic, Vision-Centric Robots,” Proceedings of International Joint Conference on Autonomous Agents and Multi-Agent Systems, New York, 23 July 2004. [18] R. A. Brooks, “Artificial Life and Real Robots,” In Pro- ceedings of the 1st European Conference on Artificial Life, MIT Press, Cambridge, 1992. Copyright © 2011 SciRes. ICA  S. DAWSON ET AL. Copyright © 2011 SciRes. ICA 143 [19] E. Gat, “Towards Principled Experimental Study of Autonomous Mobile Robots,” Autonomous Robots, Vol. 2, No. 3, 1995, pp. 179-189. doi:10.1007/BF00710855 [20] P. Husbands, I. Harvey and D. Cliff, “An Evolutionary Approach to Situated Ai,” Prospects for Artificial Intelli- gence: Proceedings of the 9th Conference of the Society for Artificial Intelligence and the Simulation of Behaviour, IOS Press, Amsterdam, 1993. [21] B. Jung and G. S. Sukhatme, “Tracking Targets Using Multiple Robots: The Effect of Environment Occlusion,” Autonomous Robots, Vol. 13, No. 3, 2002, pp. 191-205. doi:10.1023/A:1020598107671 [22] T. M. Smith, “Blurred Vision: Simulation-Reality Trans- fer of a Visually Guided Robot,” Proceedings of the 1st European Workshop on Evolutionary Robotics, Springer Verlag, Berlin, 1998. [23] A. Rosenfeld, G. A. Kaminka and S. Kraus, “Adaptive Robot Coordination Using Interference Metrics,” The 16th European Conference on Artificial Intelligence, Va- lencia, 23-27 August 2004. [24] M. Anderson and N. Papanikolopoulos, “Implicit Coop- eration Strategies for Multi-Robot Search of Unknown Areas,” Journal of Intelligent and Robotic Systems, Vol. 53, No. 4, 2008, pp. 381-397. doi:10.1007/s10846-008-9242-5 [25] B. Balaguer, S. Carpin and S. Balakirsky, “Towards Quantitative Comparisons of Robot Algorithms: Experi- ences with Slam in Simulation and Real World Systems,” IROS Workshop on Performance Evaluation and Bench- marking for Intelligent Robots and Systems, San Diego, 2 November 2007. [26] S. Balakirsky, S. Carpin, G. Dimitoglou and B. Balaguer, “From Simulation to Real Robots with Predictable Re- sults: Methods and Examples,” Performance Evaluation and Benchmarking of Intelligent Systems, Springer, Ber- lin, 2009. doi:10.1007/978-1-4419-0492-8_6 [27] B. P. Gerkey and M. J. Mataric, “Are (Explicit) Multi- Robot Coordination and Multi-Agent Coordination Really So Different?” Proceedings of the AAAI Spring Symposium on Bridging the Multi-Agent and Multi-Robotic Research Gap, Palo Alto, 22-24 March 2004. [28] J. Guerrero and G. Oliver, “Physical Interference Impact in Multi-Robot Task Allocation Auction Methods,” Pro- ceedings of IEEE Workshop on Distributed Intelligent Systems, Beijing, 26 June 2006. doi:10.1109/DIS.2006.58 [29] K. Lerman and A. Galstyan, “Mathematical Model of Foraging in a Group of Robots: Effect of Interference,” Autonomous Robots, Springer, Berlin, Vol. 13, No. 2, 2002, pp. 127-141. [30] A. Martinoli and F. Mondada, “Probabilistic Modelling of a Bio-Inspired Collective Experiment with Real Ro- bots,” Proceedings of the 3rd International Symposium on Distributed Autonomous Robotic Systems, MIT Press, Cambridge, 1997. [31] A. Rosenfeld, G. A. Kaminka and S. Kraus, “A Study of Scalability Properties in Robotic Teams,” Springer, Ber- lin, 2005. [32] T. Lochmatter and A. Martinoli, “Understanding the Po- tential Impact of Multiple Robots in Odor Source Local- ization,” 9th Symposium on Distributed Autonomous Ro- botic Systems (DARS ’08), Tsukuba, 17-19 November 2008. [33] P. E. Rybski, S. A. Stoeter, M. Gini, D. F. Hougen and N. Papanikolopoulos, “Performance of a Distributed Robotic System Using Shared Communications Channels,” IEEE transactions on Robotics and Automation, Vol. 18, No. 5, 2002, pp. 713-727. doi:10.1109/TRA.2002.803460 [34] K. Lerman, C. Jones, A. Galstyan and M. J. Mataric, “Analysis of Dynamic Task Allocation in Multi-Robot Systems,” The International Journal of Robotics Re- search, Vol. 25, No. 3, 2006, pp. 225-241. doi:10.1177/0278364906063426 [35] B. P. Gerkey, R. T. Vaughan and A. Howard, “The Player/Stage Project: Tools for Multi-Robot and Distrib- uted Sensor Systems,” Proceedings of International Conference on Advanced Robotics (ICAR), Coimbra, 30 June-3 July 2003. [36] R. Vaughan, “Massively Multi-Robot Simulation in Stage,” Swarm Intelligence, Vol. 2, No. 2, 2008, pp. 189-208. doi:10.1007/s11721-008-0014-4 [37] R. Smith, “Open Dynamics Engine,” 2007. http://www.ode.org/. [38] E. Kokkevis, D. Metaxas and N. I. Badler, “User-Con- trolled Physicsbased Animation for Articulated Figures,” Proceedings of Computer Animation, Geneva, 3-4 June 1996. [39] D. Floreano, P. Husbands and S. Nolfi, “Handbook of Robotics,” Chapter 61, Springer, Berlin, 2008, pp. 1423- 1447. [40] N. Koeing and A. Howard, “Player Project,” 2004. http://playerstage.sourceforge.net/index.php?src=gazebo. [41] S. Carpin, M. Lewis, J. Wang, S. Balakirsky and C. Scrapper, “USARSim: A Robot Simulator for Research and Education,” Proceedings of the IEEE International Conference on Robotics and Automation, Roma, 10-14 April 2007.doi:10.1109/ROBOT.2007.363180 [42] O. Michel, “Cyberbotics ltd-Webots: Professional Mobile Robot Simulation,” International Journal of Advanced Robotic Systems, Vol. 1, No. 1, 2004, pp. 39-42. [43] S. Dawson, B. L. Wellman and M. Anderson, “The Effect of Interaction on Robotic Sensor Network Experiments,” Proceedings of 2nd International Conference on Sensor Networks and Applications (SNA), Las Vegas, 8-10 No- vember 2010. [44] S. Dawson, B. L. Wellman and M. Anderson, “Using Simulation to Predict Multi-Robot Performance on Cov- erage Tasks,” Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, Paris, August 2010. [45] B. Yamauchi, “Frontier-Based Exploration Using Multi- ple Robots,” Proceedings of the Second International Conference on Autonomous Agents, New York, 10-13 May 1998. doi:10.1145/280765.280773
|