Journal of Applied Mathematics and Physics, 2014, 2, 1118-1122
Published Online November 2014 in SciRes. http://www.scirp.org/journal/jamp
http://dx.doi.org/10.4236/jamp.2014.212130
How to cite this paper: Zhao, K., Yi, B.K. and Wang, Z.F. (2014) Fiber-Loop Ringdown Multi-Function Sensors. Journal of Applied
Mathematics and Physics, 2, 1118-1122. http://dx.doi.org/10.4236/jamp.2014.212130
Fiber-Loop Ringdown Multi-Function
Sensors
Ke Zhao, Bokai Yi, Zefeng Wang*
College of Optoelectronic Science and Engineering, National University of Defense Technology, Changsha,
China
Email: *15207490554@163.com
Received Oc tob er 2014
Abstract
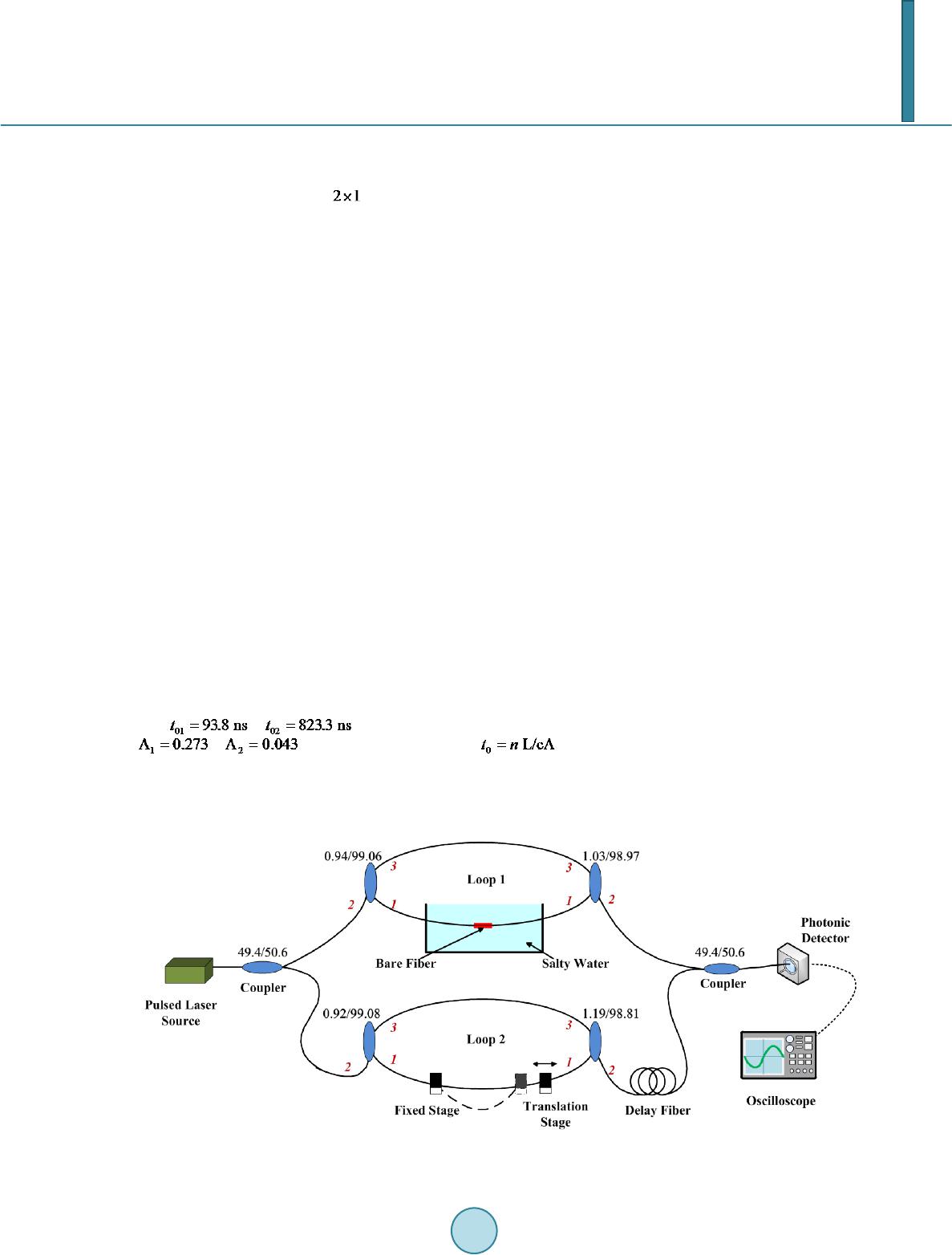
We demonstrate a fiber-loop ring down multi-function sensors system, which can be used to
measure refractive index and curvature simultaneously. Good agreement has been found between
theoretical analyses and experimental results. It has gr e at potential for sensor applications.
Keywords
Fiber-Loop Ringdown, Multi-Function Sensors, Refractive Index Sensors, Curvature Sensors
1. Introduction
Optical fiber sensors are widely applied due to its advantages of low cost, light weight, flexible structure design
and not being affected by electromagnetism. According to sensing principle, optical fiber sensors can be divided
into intensity-based ones, interferometric sensors, polarization sensors, grating sensors and so on [1]. Among
them, intensity-based sensors enjoy the most simply structure and thus were widely studied in the past. However,
the application of conventional intensity-based sensors is with limitation due to its low sensitivity and poor per-
formance towards the source light power fluctuations. Optical fiber Loop Ring down (FLRD), originating from
the traditional CRD technology, is a new intensity-based sensing technology [2]-[6]. FLRD connects two optical
couplers into an optical ring and probes external influence on the transmission loss by measuring the ring down
time. As no optical amplification is needed, no ASE noise will be introduced. That’s why FLRD manages to be
highly accurate, sensitive, fast-responding and free from light power fluctuations at the same time [2]. Apart
from that, FLRD presents pleasing flexibility in application: by equipping with different sensors, it can sense
various parameters such as pressure, temperature, strain, refractivity and so on. Currently the studies of optical
fiber sensors based on FLRD mainly focuses on measurements for a single physical parameter, few about mul-
ti-function sensing system [3]. In this paper, we demonstrate a fiber-loop ring down multi-function sensors sys-
tem, which includes a refractive index sensor and a curvature sensor. The experimental results are in well
agreement with the theoretical analyses, which testifies the feasibility of FLRD used for multi-function mea-
surement s.
*