Engineering, 2011, 3, 532-537
doi:10.4236/eng.2011.35062 Published Online May 2011 (http://www.scirp.org/journal/eng)
Copyright © 2011 SciRes. ENG
Generation and Analyses of Guided Waves in
Planar Structures
Enkelejda Sotja1, P. Malkaj2, Dhimiter Sotja2
1Department of Manufacturer-Management, Polytechnic University of Tirana, Tirana, Albania
2Department of Mechanics, Polytechnic Uniersity of Tirana, Tirana, Albania v
E-mail: esotja@yahoo.com, sotja@icc-al.org
Received February 11, 2011; revised March 22, 2011; accepted April 8, 2011
Abstract
Guided wave in plate propagates like shear waves and Lamb waves. Both kinds are very dispersive waves.
Generation and analysis of dispersion curves is very important. Those are used to predict and describe the
relation between frequency, thickness with phase velocity, group velocity and wave mode. For a stainless
steel plate with thickness 5.89 mm we built dispersion curves for shear and Lamb waves. A method based on
peak frequency shifts of the shear waves along with the thickness was applied. In line with dispersion curves
of shear waves phase velocity was seen that mode of waves translate in some points, have experiment per-
formance much better than other points.
Keywords: Guided Wave, Dispersion Curves, Shear Wave, Lamb Wave
1. Introduction
Low frequency ultrasonic waves propagate in long dis-
tance in the league (meters compared to millimeters in
conventional techniques in UT), with small loss of en-
ergy, which are called “directed waves” (guided wave).
Guided waves monitor large areas from a single posi-
tion even when the objects are not fully physically ac-
cessible, and they propagate standing localized between
surfaces of a thin-walled structure, and even it is curved.
These properties make them important for the ultrasonic
control of facilities of special importance as airplanes,
helicopters, spaceship, pressure vessels, and oil deposits.
A very important use of guided waves is in the control of
oil and gas pipelines and heat city systems regardless of
their underground or underwater location [1].
Guided waves are cited as elastic waves that propagate
in the samples where the axial dimension is many times
greater than the dimensions of the section. The energy of
these waves is guided from the boundaries of the sample
with the environment, or other materials [2].
For each object’s form and for any combination of
dimensions (e.g. section size or the internal and external
diameter), there is now a unique set of wave dissemina-
tion or the wave’s mode. Any one of these wave’s mode
will be propagate with a set pattern, known as the shape
of the mode [3].
The changing of the wave mode frequency is associ-
ated with the change of shape of the mode, phase’s ve-
locity, group’s velocity. In order to predict the relation
between frequency, the thickness of the structure and
other parameters mentioned above there are used disper-
sion curves (so called because the change of the fre-
quency brings the change of wave velocity and vibra-
tions tent to disperse during the spread). The data in
these curves are used to do the tests controlling the
structures, ranging from defining the generating equip-
ment parameters of the guided waves in the structures
until the final calculations [4].
2. Overview of the Propagation of the
Guided Waves in the Plan Structures
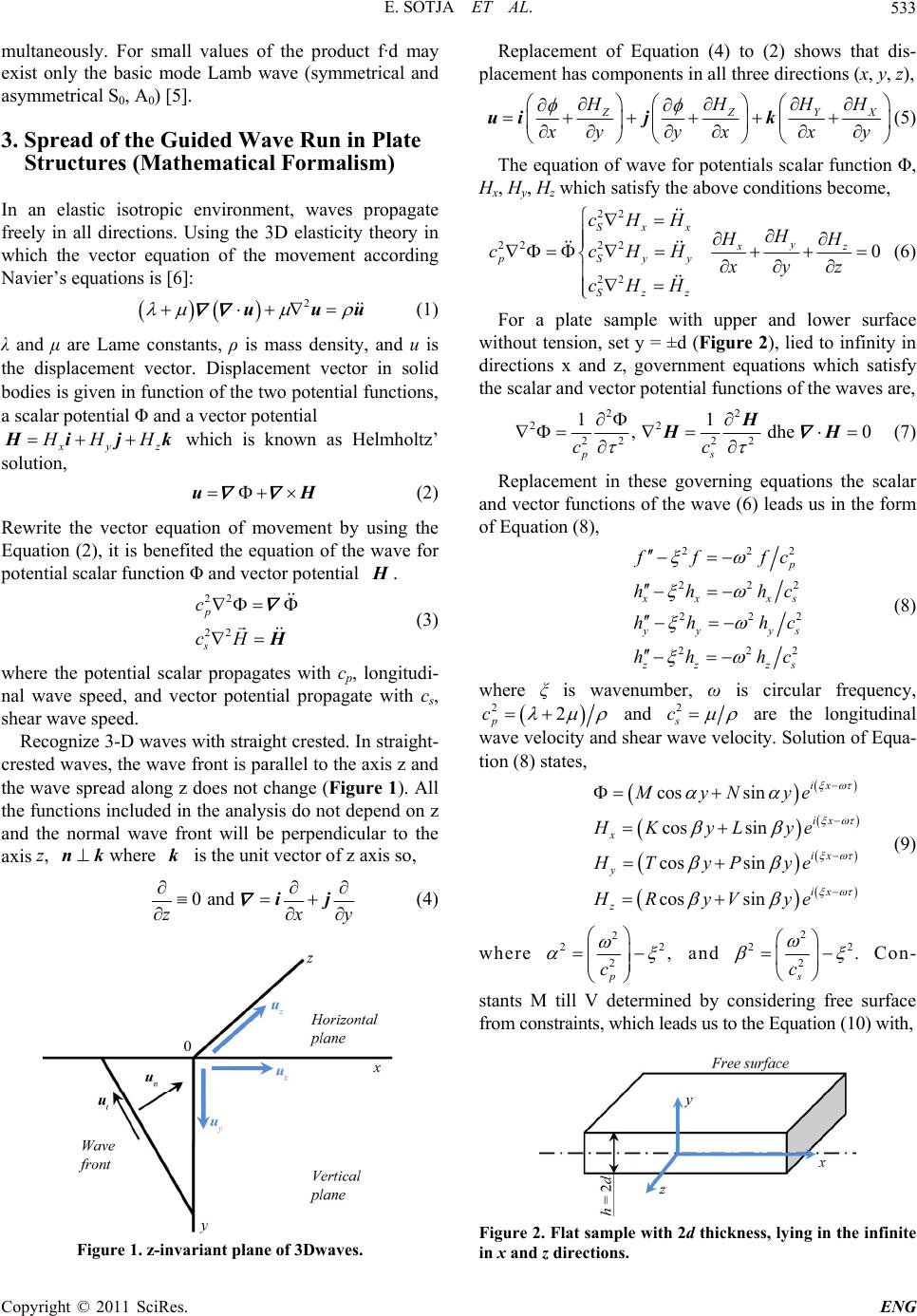
The simple forms of ultrasonic guided waves in plan
structures are shear (transversal) waves. Movement of
particles to the shear wave polarized parallel to the sur-
face of the flat structure and perpendicular to the direc-
tion of the spread of the wave. Shear waves appear
symmetrical or asymmetrical. All modes are dispersive
with exception of the base mode of the spread.
Lamb waves are guided waves the most complicated
ones that propagate in a structure. Lamb waves propagate
according to two basic wave mode, symmetric Lamb
wave S0, S1, S2, and non-symmetric Lamb wave A0, A1,
A2, both are dispersive types. Greater value of f ·d causes
bigger number of the Lamb wave’s modes that exist si-