Tracking of Non-Rigid Object in Complex Wavelet Domain
Copyright © 2011 SciRes. JSIP
110
specified by the non-zero points of Mt + x. that is for a
given translation x, for each non-zero pixel p of Mt find
the location p + x of Dt + 1. The Kth largest of these m
values found so for is the partial directed Hausdorff dis-
tance hK(Mt + x, It + 1).
3.3. Updating the Model
The new model, Mt + 1 constructed from finding the
translation x of Mt with respect to the It + 1 by selectively
choosing the non zero pixels of It + 1 which falls within a
distance of
of non zero pixels of Mtx. This can be
obtained by dialating Mt by a disc radius
, shifting this
by x, and then computing the logical AND of It + 1 with
the dialated and translated model.
4. Experimental Results
The initial model, corresponding to the first frame of the
image sequence is taken. The user needs to take a rectan-
gle in the first frame containing this initial model. Then
image is processed to select the subset of the edge pixels
in this rectangle. This is done by assuming that the cam-
era will not move in first two consecutive frames and
using this fact to filter the first image frame based on the
second image frame. Those edge pixels in the user se-
lected rectangle that moved between the first and the
second frame are used as initial model. Thus the only
input from the user is the rectangle in the first frame of
the image sequence that contains the moving object.
The proposed method of tracking of non-rigid object is
applied on various videos and the results are compared
by computing the dual tree complex wavelet coefficient
to that by real and spatial domain coefficients. It has been
observed that:
In spatial domain, tracking is more accurate but
high execution time
In real wavelet domain, tracking is not as good as
in the spatial domain but the execution time is ap-
proximately 4 times less
Tracking in Complex wavelet domain is not only
fast as compared to real wavelet domain but also it
is comparable to spatial domain.
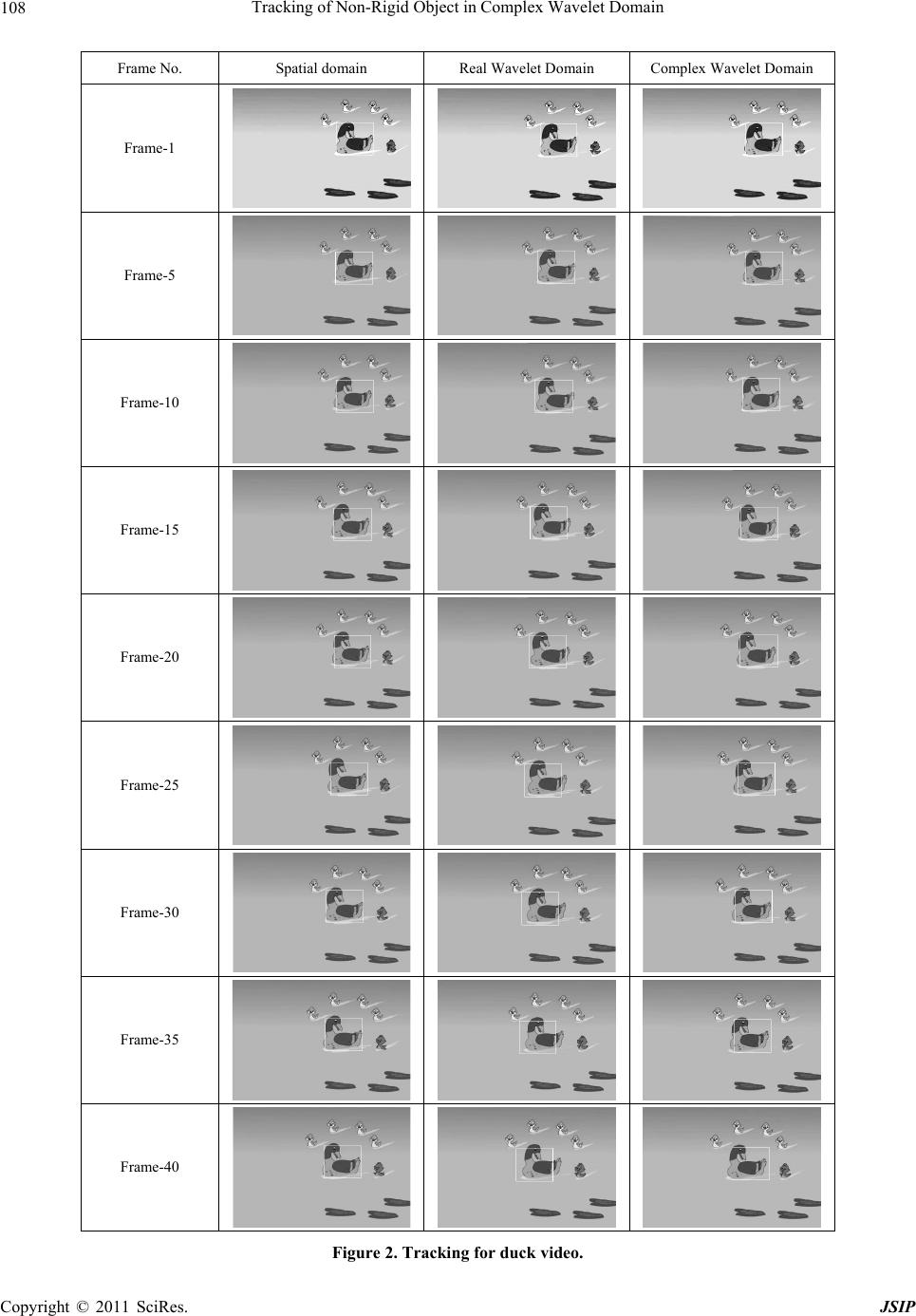
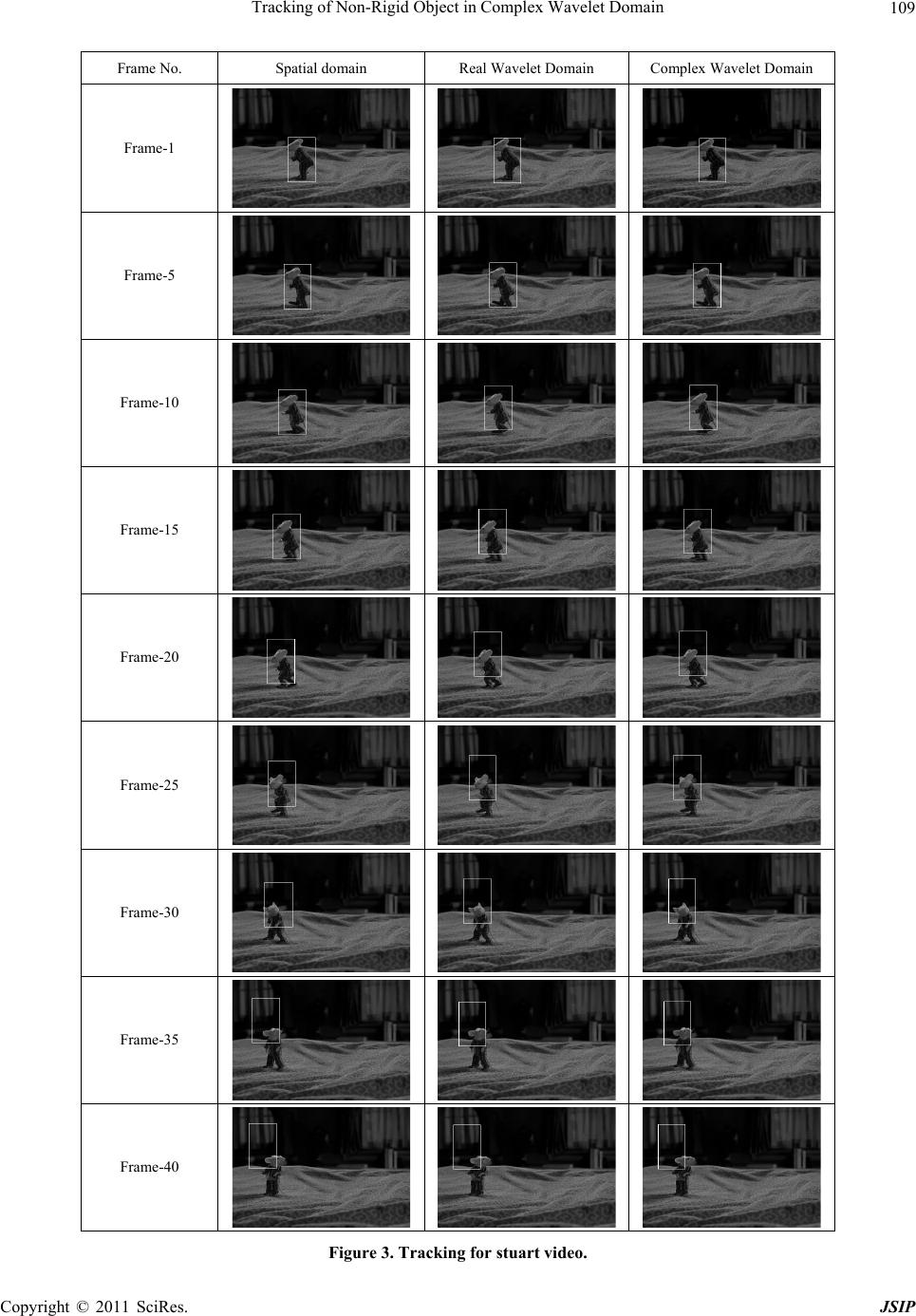
Also, we observed that in the spatial domain and real
wavelet domain the tracking work well up to the 15
frames and thereafter tracker is not able to track the ob-
ject accurately while as in complex wavelet domain it is
more accurate and efficient. Here the results are only
mentioned up to the 40 frames. The comparative results
for two representative videos are presented: in spatial
domain, real wavelet domain and dual tree complex
wavelet domain in Figure 2 and Figure 3.
5. Conclusions and Future Scope
The experiments are performed on various moving vid-
eos and non-rigid objects are tracked in spatial domain,
real wavelet domain and in complex wavelet domain.
Comparing the tracking results in three domains, we
found that the tracking in spatial domain is very accurate
because the operations are performed pixel-wise basis
but the computational time in spatial domain is high. It
has been observed that in real wavelet domain, the com-
putational complexity is low (approximately 4 times less)
but results of tracking are very poor. Tracking in com-
plex wavelet domain is fast as well as it produce good
results as compared to real wavelet domain. Here in
complex wavelet domain, both real as well as imaginary
components are taken which provide us better segmenta-
tion and tracking as compared to that of real wavelets.
The proposed tracking algorithm can be extended for
tracking of multiple objects in video sequences.
6. Acknowledgements
The authors are thankful to the Department of Science &
Technology, New Delhi and the University Grants
Commission (UGC), New Delhi, India for providing re-
search grant vide its grant nos. SF/FTP/ETA-023/2009
and 36-246/2008( SR) for research project.
REFERENCES
[1] A. K. Jain, “Fundamentals of Digital Image Processing,”
Prentice Hall of India Pvt. Ltd., New Delhi, 2001.
[2] S. Nigam and A. Khare, “Curvelet Transform Based Ob-
ject Tracking,” Proceedings of IEEE International Con-
ference on Computer and Communication Technologies,
Allahabad, 17-19 September 2010, pp. 230-235.
[3] M. Khare, T. Patnaik and A. Khare, “Dual Tree Complex
Wavelet Transform Based Video Object Tracking,” Com-
munications in Computer and Information Science, Vol.
101, No. 2, 2010, pp. 281-286.
[4] H. Goszczynska, “A Method for Densitometric Analysis
of Moving Object Tracking in Medical Images,” Machine
Graphics & Vision International Journal, Vol. 17, No. 1,
2008.
[5] Z. M. Budimlija, M. Leckpammer, D. Popiolek, F. Fogt,
M. Forenderick and R.Bieber, “Forensic Applications of
Capture Laser Microdissections: Use in DNA-Based Pa-
rentage Testing and Plateform Validation,” Croatian
Medical Journal, Vol. 46, No. 4, 2005, pp. 549-555.
[6] R. Anderson, N. Kingsbury and J. Fauqueur, “Coarse
Level Object Recognition Using Interlevel Products of
Complex Wavelets,” Proceedings of IEEE Conference on
Image Processing, Genoa, September 2005.
[7] N. G. Kingsbury and J. F. A. Magarey, “Wavelet Trans-
forms in Image Processing,” Proceedings of 1st European
Conference on Signal Analysis and Prediction, Prague,
24-27 June 1997, pp. 23-34.
[8] I. W. Selesnick, R. G. Baraniuk and N. G. Kingsbury,
“The Dual-Tree Complex Wavelet Transform,” IEEE