 Journal of Signal and Information Processing, 20 11 , 2, 72 - 78 doi:10.4236/jsip.2011.22010 Published Online May 2011 (http://www.SciRP.org/journal/jsip) Copyright © 2011 SciRes. JSIP Video Frame’s Background Modeling: Reviewing the Techniques Hamid Hassanpour, Mehdi Sedighi, Ali Reza Manashty Department of Computer Engineering & IT, Shahrood University of Technology, Shahrood, Iran. Email: h_hassanpour@yahoo.com, {sedighi_mahdi87, a.r.manashty}@gmail.com Received January 20th, 2011; revised February 27th, 2011; accepted March 5th, 2011. ABSTRACT Background modeling is a technique for extracting moving objects in video frames. This technique can be used in ma- chine vision applicatio ns, such as video frame compression and monitoring. To model the background in video frames, initially, a model of scene background is constructed, th en the current frame is subt racted from the background. Even- tually, the difference determines the moving objects. This paper evaluates a number of existing background modeling techniques in terms of accuracy, speed and memory requirement. Keywords: Background Modeling, Moving Object 1. Introduction Detection of objects or persons in a video sequence re- quires, in most of the techniques, that the background of the frame be omitted from the scene. A common method for extracting moving objects in video sequences is background subtraction [1,2]. This technique can be used in monitoring applications such as work place security, traffic control and video frame compression [3-5]. To detect the moving objects in video frames, initially, the model of scene background must be constructed (i.e. the image without the moving objects), then current frame is subtracted from the background model and eventually, the difference, determines the moving objects [6,7]. Background modeling can be classified into two main groups: non-statistical [8-10] and statistical approaches [2,11,12]. In the former group, the background image, usually from the initial frame, is modified along the frame sequences. In this approach, to extract the moving objects in the video sequences, the difference between the current frame and the background model is computed. Non-statistical approaches are fast, hence, they are suit- able for real time applications. The non-statistical background modeling presented in [1,13] namely RGABM, considers each pixel in a frame to be either as part of the moving object (simply the ob- ject) or the background. In this approach, the first frame is considered as the background and subsequent frames are subtracted from the background. Then the pixels with a value higher than a threshold are considered as the ob- jects. In this approach, the background is updated along the frame sequences. In the second group of background modeling ap- proaches, the statistical based approaches, the probability distribution functions of the background pixels are esti- mated; then, in each video frame, the likelihood that a pixel belongs to the background is computed. The statis- tical based approaches have a better performance, com- pared to the non-statistical based approaches, in model- ing background of the outer scenes. However, they may require more memory and processing time and hence be slower than the non-statistical based approaches. One of the important statistical-based approaches to model the background image is the Gaussian mixture model. This approach uses mixture of models (multi- models) to represent the statistics of the pixels in the scene. The multimodal background modeling can be very useful in removing repetitive motion from, for examples shining water, leaves on a branch, or a wigging flag [14, 15]. This approach is based on the finite mixture model in mathematics, and its parameters are assigned using the expectation maximization (EM) algorithm. The non-parametric statistical-based background mod- eling presented in [11] can handle situations in which the background of the scene is cluttered and not completely static. In the other words, the background may have small wiggling motions, as it is in tree branches and bushes. This model estimates the probability of observ- ing a specified value for a pixel in its previous values  Video Frame’s Background Modeling: Reviewing the Techniques73 , obtained from older frame sequences. This model is fre- quently updated to adapt with the changes in the scene, hence to have a sensitive detection of moving targets. There is a tradeoff between computational speed, memory requirement and accuracy in using the statistical based methods compared to non-statistical based meth- ods. It is important for users to know the capabilities of different techniques, to choose the suitable method for their applications, which is the aim of this paper. There are a number of issues need to be considered in any background modeling technique, they include de- tecting objects from the background, updating the back- ground during time and extracting moving objects from video frames. These issues are considered as comparison factors in the evaluation process of this paper. The rest of this paper is organized as following: Sec- tion 2, and Section 3, respectively, review a number of non-statistical and statistical background modeling meth- ods. Experimental results of evaluating different back- ground modeling methods on various videos are pre- sented in Section 4. Finally, the paper is concluded in Section 5. 2. Non-Statistical-Based Background Modeling Methods The non-statistical approaches suppose that the back- ground is an image, usually from the initial frame, which is modified along the frame sequences. These approaches, aimed to extract the moving objects in the video se- quences, use the difference between the current frame and the background model. The non-statistical methods are suitable for real time applications as they are consid- erably fast. To detect moving objects, in these approaches, subsequent frames are subtracted from the background, and then pixels with the value higher than a threshold are considered as the objects. A number of existing non- statistical background modeling methods are briefly de- scribed in the following subsections. 2.1. Background Modeling Independent of Time This method is the simplest approach for computing background, which is independent of time; hence this method is named as BMIT (Background Modeling Inde- pendent of Time) [14,16,17]. In this approach, the first frame in video frame sequences is supposed to be the background and remains unchanged along the video se- quences. The mathematical description of the back- ground model can be represented as 0 , k yx BIy (1) where , k y is the pixel (x, y) of k-th captured frames, and , k y B 2.2. The Improved Basic Background Modeling BMIT suffers from noise and varying luminance in im- age sequence. The improved basic background modeling (IBBM) method was developed in [5] to alleviate the deficiencies of BMIT approach. Once the pixel value of the absolute difference frame is more than the threshold value, the pixel is regarded as part of the foreground; otherwise, it is assigned to the background. Whenever a pixel belongs to the moving object, it should be updated; otherwise, it is not essential to update. According to this idea, the mathematical description of IBBM can be ex- pressed as the following [16]: ,, ,1 ,, , , kk xy xy k xy kk xy xy AD T BBAD T (2) where , k y D is the pixel (x, y) of the absolute difference frame between the k-th captured frame and the (k-1)-th background model, i.e: 1 ,,, kkk yxyxy ADIB (3) The IBBM method can be used to reduce the noise ef- fect and the varying luminance effect. However, IBBM has deckle effect hence it suffers from updating the deckle of the foreground in the background model [16,18]. On the other hand, if the foreground and back- ground have similar colors then the wrong updating oc- curs. 2.3. The Long-Term Average Background Modeling To solve the deckle effect problem of IBBM, the long- term average background modeling (LTABM) was sug- gested in [15,19] as defined bellow: , 1 1k k , k y r B k xy I (4) and its recursive model is as follows: 1 ,, 11 1 kk , k yxy BB kk xy I (5) The LTABM computes the average by involving the whole past frame up to the current frame. This approach depends on the number of frames (K). The smaller the number of frames, the larger the weight of each frame; hence, noise in each frame would be considered more. By increasing the number of frame, the weight of each frame is reduced; subsequently, the luminance variation would considerably generate amount of noise effect on the background. 2.4. The Moving Average Background Modeling The moving average background modeling (MABM) is the pixel (x, y) of k-th background model. Copyright © 2011 SciRes. JSIP  Video Frame’s Background Modeling: Reviewing the Techniques 74 improves the LTABM, by employing the following defi- nition for background model [10]: , ,, 1 ,1 1, i xy kr xy xy rk W IW BI others W 0i (6) where W is the moving length. The background is the average of recent W captured frames. The weights of the last W frames are equal, but it cannot be written in a re- cursive form, which results in a very high memory re- quirement. 2.5. Running Gaussian Averaging Background Modeling The Running Gaussian Averaging Background Modeling (RGABM) approach not only can be used to reduce the varying luminance effect and noise, but also can be writ- ten in a recursive form, as follows [16]: 1 ,, ,0 , 1,1, 0, 0 kk xy xy k xy xy BIk BIk 0,1 (7) where 1 , k y B represents the background model in k-1 previous frames, and is the background updating rate. In this method, the value of is very important and is typically set to 0.05 [18]. 3. Statistical-Based Background Modeling Methods In statistical-based background modeling, the probability function of background is estimated. This function de- termines the probability for the belonging of the pixel to the background. Despite non-statistical based methods, these approaches are suitable for modeling outdoor and dynamic scenes. A number of these approaches are re- viewed in the following subsections. 3.1. Gaussian Mixture Model One of the challenging issues in background modeling is to model repetitive motions in the video such as the shining water, leaves of a branch, or a waving flag. Stauffer and Grimson in [2] have introduced the Gaus- sian mixture model (GMM) to extract the statistics of repetitive moving objects often exist in outdoor scenes. This approach employs the finite mixture method [20] to estimate the background model. In finite mixture me- thod, 1, , ii xxi n can be estimated as the sum of c weighted kernels as below: 1 ;, c ii i fxpgxc n (8) wher denotes the weight for the i-th kernel e pi , 1 i i p c , pi ≥ 0, ag (x; i nd ) is the probability density function with i as the kernel density parameter. For eachn give feature vector x, it is considered as the background if fx . In (8), the parameter should be set in a way that a higensity function be assigned to the samples her value d be long to the background. This issue causes the back- ground and foreground pixels be classified with an ac- ceptable accuracy. The authors in [2] have used the EM as a valuable tool for optimizing problem. In using the EM technique, the number of kernel function must be given. In this ap- proach, an initial estimate for the kernel parameters val- ues is needed. After that, the parameters are updated fol- lowing the new data value. The first step is to determine the posterior probabilities given by (9). ˆ ˆˆ ;, ˆ1, 2,,; ˆ ijii ij px icj 1, 2,, j n fx (9) where ˆij xj represents the estimated posterior prob ties that belongs to the i-th kernel, abili- ˆ ˆ ;, ii x is the Normal density function of i-th kernel evaluated at xj ,i gx in (8) was assumed to be Normal with ˆ ˆ ;, ˆ ii x , and x is the finite mixture esti- mat xj. robability in (9) provides the li- kelihood that a point s to each of the separate ker- ne ated Indeed, the posterior p belong l densities. We can use this estimated posterior prob- ability to obtain a weighted update of the parameters for each kernel. Following the EM algorithm, updated pa- rameters for the mixing coefficients, the means, and the covariance matrices are obtained as bellow [20]: 1 1ˆ n iij j wn (10) 1 ˆ 1 ˆˆ nij j iji np (11) 1 ˆˆ 1 ˆ ˆ ni jji iji x np (12) Stauffer and Grimson have used the follo tionally simplified equations, as they can be implemented us ˆ T ji x wing computa- ing recursive technique in programming [2]: 11, kktk wwpkx (13) 11 kkkkt where (14) 11 1T k kkktk x 1 tk x (15) Copyright © 2011 SciRes. JSIP  Video Frame’s Background Modeling: Reviewing the Techniques75 1 1N (16) , tk kk pkx w (17) 3.2. Non-Parametric Model Previous methods assumed that the ey need to optimize the rs; but optimization is a parameters of the model are unknown, and hence, th initial values of kernel paramete time consuming operation. To overcome this problem, a non-parametric model was introduced in [1]. In this ap- proach, there is no need to optimize the parameters of each kernel. For modeling the messy and fast wiggling behavior, the model must be updated continuously in order to capture the fast changes in the scene back- ground. For describing this model, let 12 ,, , xx be a re- cent sample of intensity values for a pixel. The probabil- ity density function, which indi va cates the pixe d using the l intensity lue (xt) at time t, can be estimatekernel es- timator K as following: 1 1 Pr N tti i Kx x N (18) If we choose our kernel estimator function, K, to be a Normal function presents width of kernelnsity can be esti- m 0,N function, , where then th e re de the band- ated using bellow equation [11]: 1 2 1 12 2 11 Pr e 2π T ti ti 1 N xxx td i xN (19) If we assume independency between the diffe or channels, and each color channel (j-th chann different kernel bandwidth value of rent col- el) has a 2 i , then the band width matrix would be: 2 1 2 2 2 3 0 00 00 0 (20) and the density estimation is reduced to [20]: 2 2 1 2 2 11 Pr e 2π j tij xN 11 tj ij xx d N j (21) The pixel xtnsidered as part of foregrou is cond pixel if Pr t t over the en wher im e the threshold t is a globa tireage that can be adjusted to achieve a de Since w e distribution and only few pairs are ex l threshold sired accuracy. e measure the deviations between two consecu- tive intensity values, the pair (xi, xj) usually comes from the same local-in-tim pected to come from cross distributions. If we assume that this local-in-time distribution is Normal 2 , , then the deviation (xi – xj) is has also a Normal distribu- tion with. 2 ,2N Therefore, the standard deviation of the first distribution can be estimated as [11]: 1 0.68m (22) ve i ects ex l to 4. Performance Evaluation udy we ha ng obj is equa In this stmplemented the above nce in term nd accurac i es: initially th the non-statistical b traction phase. In th nd coefficient associate on is also d for each pi ls are considered O(K*M* N*d ). for each ents, covariance m described s of mem- y in back- rements of e statisti- ased e updating d xel. for each pixel, then ea- sure- methods to evaluate their performa ory requirement, consuming time, a ground modeling. In the following sections, we discuss the above factors in each approach. Experimental results of the last two factors are also provided. In the evaluation process, the video frames are assumed to be gray-scale and the size of video frames is (M*N) pixels. 4.1. Memory Requirement In this section, we compare the memory requ the above described approach cal-based approaches, afterward approaches. 4.1.1. Statistical App roaches The GMM algorithm has two phases: the updating phase, and the movi phase, the mean, variance, a with each kernel (K) are updated. In addition, a number of features (d) are considered for each pixel. In the fol- lowing discussions, the mean, variance, and coefficient are verified for a frame of video in using this approach. The following assumptions are considered in evaluating the memory requirement: 1) For mean measurement: If dimension of input data is equal to d, then the mean vector dimensi A number of M*N pixe frame. The number of kernels is equal to K. Consequently, the memory requirement order for mean measurement 2) For covariance measurement: If the number of dimensions is d, then covariance matrix is a d*d matrix. The number of kernels are K K*d*d arrays are required for each pixel. According to above statem ment memory requirement for a single frame is of O(M*N*d*d*K). 3) For coefficient measurement: Copyright © 2011 SciRes. JSIP  Video Frame’s Background Modeling: Reviewing the Techniques 76 As the number of kernels for each pixel is K and each kernel the updating phase to c (13)-(17) for each pixel. If data dimension is d, ing equal tinsump- r of consuming tim k*d*d) for each pi racy, ity of the methods to discriminate ob- has one coefficient, K coefficients are t in coefficient measurement and coefficient for each pixel are stored in the m e kernel fu und as an image. All techniques in of memory for pix- ime consumption of dif- techniques. As mentioned ting the moving objects are needed for each pixel. The number of total pixels in a frame is M*N. According to the two aforementioned assumptions, the order of memory requiremen is O(M*N*K) for each frame. Eventually, it is concluded that the first phase of GMM algorithm needs O(M*N*K*d*d) units of mem- ory. The second phase of GMM algorithm extracts the moving objects. At this step, the values of mean, covari- ance, emory. According to the first phase, the memory re- quirement for this step is also O(M*N*K*d*d). The second algorithm in statistical-based approaches is non-parametric background modeling. In this approach, memory requirement directly depends upon th nction. If the considered kernel function has a Normal distribution, the number of evaluating samples is equal to H, and the extracting feature dimension is equal to d for each pixel, then the required memory will have an order of O(H*M*N*d*d). 4.1.2. N on-Statistical Appro ach es The non-statistical approaches of background modeling consider the backgro these approaches need M*N units el-data storage except the MABM technique, which needs L*M* N entries (L denotes the number of frames). Table 1 summarizes the memory requirement for all of the techniques discussed above. 4.2. Time Consumption In this section, we compute the t ferent background modeling earlier, updating and extrac the two phases of the GMM algorithm. It is essential in Table 1. Memory requirement for different background modeling approaches. Approach Type Algorithm Name Memory Requirements GMM O(K*M*N*d*d) Statistical Approaches Non-parametric ackground model b M*N LTABM L*M*N O(K*M*N*d*d) BMIT IBBM M*N M*N MABM Non-Statistical Approaches RGABM M*N ompute by assumme co tion for multiplication and division operations, and ne- glecting the time consumption for addition and subtrac- tion operations, then: 1) In (13), the order of time is O(d*d). 2) In (14), the order of time is O(d). 3) In (15), the order of time is O(d*d). 4) In (16), the order of time is O(1). 5) In (17), the order of time is O(d*d). 6) If the model has k kernels, then orde e for the updating phase would be O( xel, thus, order of time for each frame will be O(M*N*k*d*d). We need to use (19) to extract the moving object from the video sequences. In this equation, the order of time is O(k*d*d) per pixel, therefore the time consumption of each frame will be O(k*d*d*m*n ). In non-parametric method, by considering K and A as respectively the number of kernels and the time con- sumption to compute the belonging of a pixel to each kernel, the order of time for each pixel and each frame will respectively be O(K* A) and O(M*N* K* A). The or- der of time for BMIT is a constant, hence of order O(1). For background modeling using IBBM, according to (3), the order of this function is O(M*N). The LTABM me- thod uses (15) for background modeling and this function contains two multiplications and one addition operation. Consequently, the order of time for LTABM will be of order O(M*N). MABM algorithm, for constructing the model, calculates mean of L frames, hence the time con- sumption for this method is of order O (L*M*N). Even- tually the order of time for RGABM method, according to (9), is of order O(M*N). To intuitively evaluate the time consumption of dif- ferent background modeling techniques, we applied them on a sample video containing 100 frames each with a dimension of 320 × 240 pixels. The experimental results have been provided in Table 2. The results demonstrate that the non-statistical methods are faster than statistical method; hence, these methods are suitable for real time applications. On the contrary, the consuming time of statistical methods (in particular, the non-parametric me- thod) is much more than non-statistical methods; there- fore, these methods cannot be used for real time applica- tions. These results confirm the results in [5,10,16]. 4.3. Accuracy The last factor to be discussed in this paper is accu which is the abil jects from the background. For computing the accuracy, we define two error parameters. The first parameter is Copyright © 2011 SciRes. JSIP 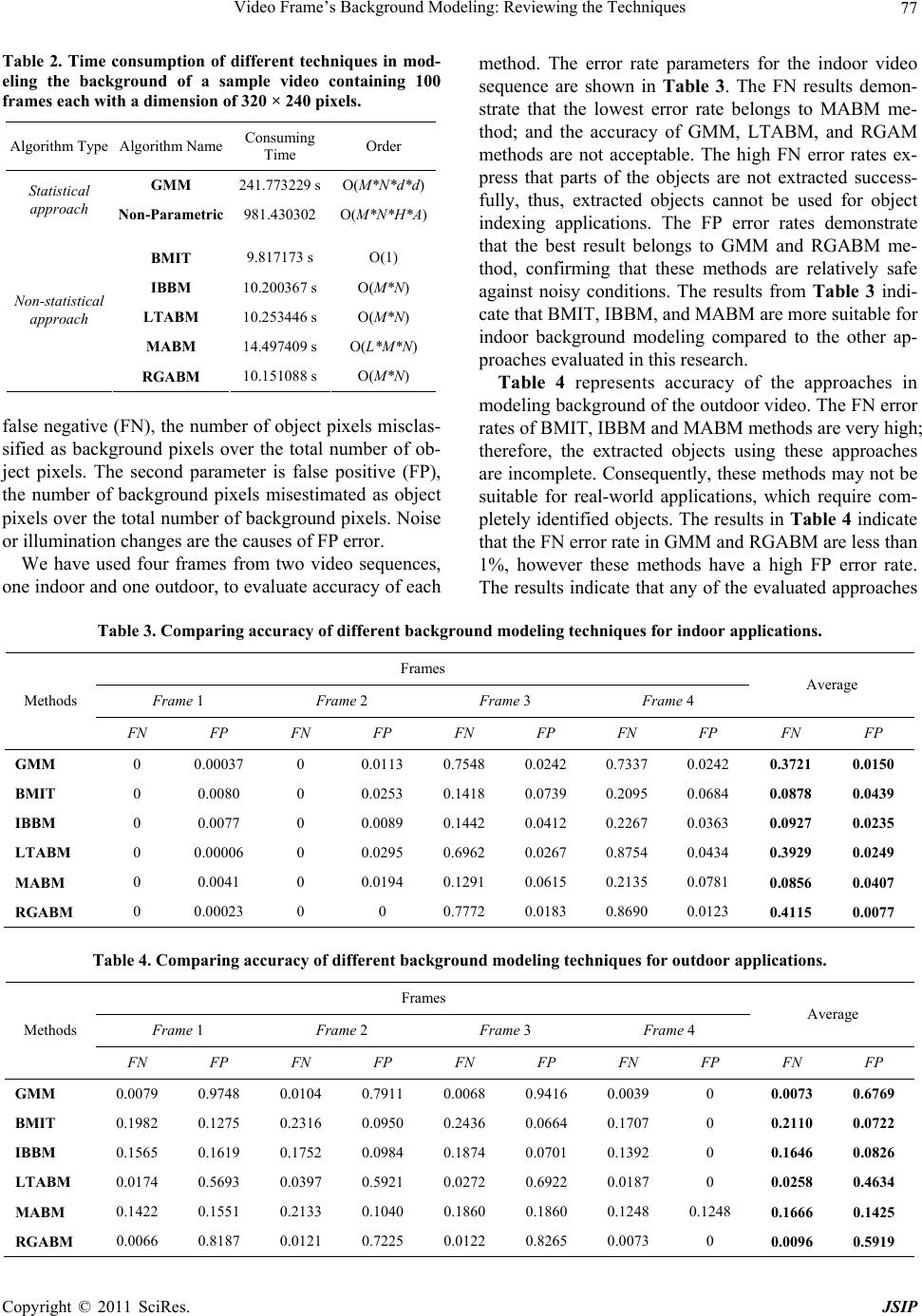 Video Frame’s Background Modeling: Reviewing the Techniques Copyright © 2011 SciRes. JSIP 77 Table 2. Time consumption of different techniques in mod- eling the background of a sample video containing 100 frames each with a dimension of 320 × 240 pixels. Algorithm Type Algorithm Name Consuming Time Order GMM 241.773229 s O(M*N*d*d) Statistical O(M*N*H*A) LTABM O O Non-statistical approach approach Non-Parametric 981.430302 BMIT 9.817173 s O(1) IBBM 10.200367 s O(M*N) 10.253446 s (M*N) MABM 14.497409 s (L*M*N) RGABM 10.151088 s O(M*N) false negative (FN), t sified as backgrounum ixels. The second parameter is false positive (FP), the approaches in m ound modeling techniques for indoor applications. he number of object pixels misclas- nd pixels over the total ber of ob- ject p the number of background pixels misestimated as object pixels over the total number of background pixels. Noise or illumination changes are the causes of FP error. We have used four frames from two video sequences, one indoor and one outdoor, to evaluate accuracy of each method. The error rate parameters for the indoor video sequence are shown in Table 3. The FN results demon- strate that the lowest error rate belongs to MABM me- thod; and the accuracy of GMM, LTABM, and RGAM methods are not acceptable. The high FN error rates ex- press that parts of the objects are not extracted success- fully, thus, extracted objects cannot be used for object indexing applications. The FP error rates demonstrate that the best result belongs to GMM and RGABM me- thod, confirming that these methods are relatively safe against noisy conditions. The results from Table 3 indi- cate that BMIT, IBBM, and MABM are more suitable for indoor background modeling compared to the other ap- proaches evaluated in this research. Table 4 represents accuracy of Table 3. Comparing accuracy of different backgr odeling background of the outdoor video. The FN error rates of BMIT, IBBM and MABM methods are very high; therefore, the extracted objects using these approaches are incomplete. Consequently, these methods may not be suitable for real-world applications, which require com- pletely identified objects. The results in Table 4 indicate that the FN error rate in GMM and RGABM are less than 1%, however these methods have a high FP error rate. The results indicate that any of the evaluated approaches Frames Frame 1 Frame 2 Frame 3 Frame 4 rage Ave Methods FN FN FN FN FN FP FPFP FP FP GMM 0. 7 0. 0. 0. 0. 0. 0. 0 0 0003 0 011375480242 7337 02423721 .0150 BMIT 0 0.0080 0 0.0253 0.1418 0.0739 0.2095 0.0684 0.0878 0.0439 IBBM 0 0.0077 0 0.0089 0.1442 0.0412 0.2267 0.0363 0.0927 0.0235 LTABM 0. 0. 0 00006 0 0.0295 0.6962 0.0267 0.8754 0.0434 0.3929 0.0249 MABM 0 0.0041 0 0.0194 0.1291 0.0615 0.2135 0.0781 0.0856 0.0407 RGABM 0 00023 0 0 0.7772 0.0183 0.8690 0.0123 0.4115 0.0077 Table. Comccuraof differe backgmodchnr ouppl. 4paring acy ntround eling teiques fotdoor aications Frames Frame 1 Frame 2 Frame 3 Frame 4 age Aver Methods FN FP FNP FNFN FP F FP FN FP GMM 0. 0. 0. 0. 0. 0. 0. 0. 0 0079 9748 0104 7911 0068 9416 00390 0073 .6769 BMIT 0.1982 0.1275 0.2316 0.0950 0.2436 0.0664 0.1707 0 0.2110 0.0722 IBBM 0.1565 0.1619 0.1752 0.0984 0.1874 0.0701 0.1392 0 0.1646 0.0826 LTABM 0.0174 0.5693 0.0397 0.5921 0.0272 0.6922 0.0187 0 0.0258 0.4634 MABM 0.1422 0.1551 0.2133 0.1040 0.1860 0.1860 0.1248 0.1248 RGABM 0.0066 0.8187 0.0121 0.7225 0.0122 0.8265 0.0073 0 0.0096 0.5919 0.1666 0.1425  Current Distortion Evaluation in Traction 4Q Constant Switching Frequency Converters 78 hr a hi or FPisved tharamato erly for u icat ling methods can be classified into atistical and non-statistical approaches. irst group use statistical concep . R. Wren, A. Azarbayejani, T. Darrell and A. P. Pent- land, “Pfinderthe Human Body,” IEEE Transacis and Machine as eithegh FN a high, which concei at their p tdoor appl meters ions. y need be prop tuned o 5. Conclusions The background mode two main groups: st Approaches in the fts for background modeling. Memory requirement and con- suming time of these methods are very high; hence, sta- tistical approaches are not suitable for real time applica- tions. On the other hand, these methods can be suitable for outdoor environment if their parameters be properly tuned, because of their safe operation in noise and sud- den change condition. However, non-statistical methods are very easy to implement, and memory requirement of these approaches is very low compared to statistical me- thods. In addition, time consumption of non-statistical methods is rather low; consequently, these methods are suitable for indoor environments and real-time applica- tions. REFERENCES [1] C : Real-Time Tracking of tions on Pattern AnalysIn- telligence, Vol. 19, No. 7, 1997, pp. 780-785. doi:10.1109/34.598236 [2] C. Stauffer and W. E. L. Grimson, “Adaptive Background Mixture Models for Real-Time Tracking,” IE puter Society ConferencEE Com- e on Computer Vision and Pat- tern Recognition, Vol. 2, No. 23-25, 1999, pp. 246-252. [3] L. Hanzo, P. J. Cherriman and J. Streit, “Video Compres- sion and Communications,” WILEY, 2007. doi:10.1002/9780470519929 [4] Y. Q. Shi, H. F. Sun, “Image and Video Compression for Multimedia Engineering,” CRC Press, Boca Raton, 2008. doi:10.1201/9781420007268 [5] P. Kumar, K. Sengupta and A. Lee. “A Comparative Study of Different Color Spaces for Foreground and Shadow Detection for Traffic Monitoring System,” Pro- 4. ] P. Blauensteiner, H. Wildenauer, A. Hanbur. KamOn Cpr Changte Shadow Suppression,” Proceedings 1th er st Symposium on Applied perception in E ICCV’99 gs of the 12th ter Society and Machine In- ceedings of the IEEE 5th International Conference on In- telligent Transportation Systems, 2002, pp. 100-105. [6] N. Schofield and C. McFarlane, “Segmentation and Track- ing of Piglets in Images,” Machine Vision and Applica- tions, 1995, pp. 187-193. [7] Cavallaro, A. Salvador and E. Ebrahimi, “Detecting Sha- dows in Image Sequences,” Visual Media Production (CVMP), 2004, pp. 165-17 [8 y and M ction andpel, “olour Saces foe De of the 1Comput Winter Vision Workshop (CVWWS6), 6-8 February 2006, pp. 117-123. [9] Erum A. Khan and E. Reinhard, “A Survey of Color Spaces for Shadow Identification,” APGV ’04: Proceed- ings of the 1 graphics and visualization, New York, 2004, p.160. [10] M. Piccardi, “Background Subtraction Techniques: A Review,” IEEE International Conference on Systems, Man and Cybernetics, Vol. 4, 2004, pp. 3099-3104. [11] A. M. Elgammal, D. Harwood and L. S. Davis, “Non- Parametric Model for Background Subtraction,” Pro- ceedings of ECCV 2000, 2000, pp. 751-767. [12] T. Horprasert, D. Harwood and L. S. Davis. “A Statistical Approach for Real-Time Robust Background Subtraction and Shadow Detection,” Proceedings of IEE FRAME-RATE Workshop, 1999, pp. 1-19. [13] D. Koller, J. Weber, T. Huang, J. Malik, G. Ogasawara, B. Rao and S. Russell, “Towards Robust Automatic Traffic Scene Analysis in Real-Time,” Proceedin IAPR International Conference on Computer Vision & Image Processing, Vol. 1, 1994, pp. 126-131. [14] N. Martel-Brisson and A. Zaccarin, “Moving Cast Shadow Detection from a Gaussian Mixture Shadow Model,” In CVPR ’05: Proceedings of the IEEE Compu Conference on Computer Vision and Pattern Recognition (CVPR’05), Vol. 2, 2005, pp. 643-648. [15] A. Prati, I. Mikic, M. M. Trivedi and R. Cucchiara, “De- tecting Moving Shadows: Algorithms and Evaluation,” IEEE Transactions on Pattern Analysis telligence, Vol. 25, No. 7, 2003, pp. 918-923. doi:10.1109/TPAMI.2003.1206520 [16] S.-T. Su and Y.-Y. Chen, “Moving Object Segmentation Using Improved Running Gaussian Average B Model,” Digital Image Computing: ackground Techniques and Ap- Vision Systems, Springer, edman and S. Russell, “Image Segmentation in ersity in Artificial In- plications, 2006, pp. 24-30. [17] N. Oliver, B. Rosario and A. Pentland, “A Bayesian Com- puter Vision System for Modeling Human Interactions,” International Conference on 1999. [18] R. Jain, R. Kasturi and B. G. Schunk, “Machine Vision,” McGraw-Hill Inc., 2003, pp. 63-69. [19] N. Fri Video Sequences: A Probabilistic Approach,” Proceed- ings of the 13th Conference on Univ telligence (UAI), 1997. [20] L. Wendy and A. R. Martinez, “Computational Statistics Handbook with Matlab,” CRC Press, 2002. Copyright © 2011 SciRes. JSIP
|