Applied Mathematics
Vol.06 No.10(2015), Article ID:59733,14 pages
10.4236/am.2015.610152
An Implicit Smooth Conjugate Projection Gradient Algorithm for Optimization with Nonlinear Complementarity Constraints
Cong Zhang1*, Limin Sun1, Zhibin Zhu2, Minglei Fang3
1Huarui College, Xinyang Normal University, Xinyang, China
2School of Mathematics & Computational Science, Guilin University of Electronic Technology, Guilin, China
3College of Science, Anhui University of Science and Technology, Huainan, China
Email: *zhcopt@126.com
Copyright © 2015 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 26 July 2015; accepted 15 September 2015; published 18 September 2015
ABSTRACT
This paper discusses a special class of mathematical programs with equilibrium constraints. At first, by using a generalized complementarity function, the discussed problem is transformed into a family of general nonlinear optimization problems containing additional variable m. Furthermore, combining the idea of penalty function, an auxiliary problem with inequality constraints is presented. And then, by providing explicit searching direction, we establish a new conjugate projection gradient method for optimization with nonlinear complementarity constraints. Under some suitable conditions, the proposed method is proved to possess global and superlinear convergence rate.
Keywords:
Mathematical Programs with Equilibrium Constraints, Conjugate Projection Gradient, Global Convergence, Superlinear Convergence

1. Introduction
Mathematical programs with equilibrium constraints (MPEC) include the bilevel programming problem as its special case and have extensive applications in practical areas such as traffic control, engineering design, and economic modeling. So many scholars are interested in this kind of problems and make great achievements, (see [1] -[10] ).
In this paper, we consider an important subclass of MPEC problem, which is called mathematical program with nonlinear complementarity constraints (MPCC):
 (1.1)
(1.1)
where ,
,
 ,
,
 are all continuously differential functions,
are all continuously differential functions, .
.
 denotes orthogonality of the vectors y and
denotes orthogonality of the vectors y and , i.e.,
, i.e., .
.
In order to eliminate the complementary constraints, which can not satisfy the standard constraint qualification [11] , we introduce the generalized nonlinear complementary function

Obviously, the following practical results about function
 hold:
hold:
• if
 and
and , then
, then
 (1.2)
(1.2)
•
 (1.3)
(1.3)
By means of the function , problem (1.1) is transformed equivalently into the following standard nonlinear optimization problem
, problem (1.1) is transformed equivalently into the following standard nonlinear optimization problem
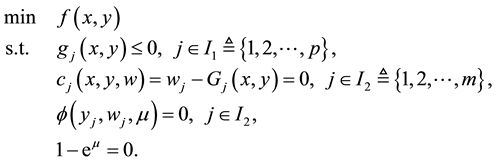 (1.4)
(1.4)
Similar to [12] , we define the following penalty function

where
 is a penalty parameter. Therefore, our approach consists of solving an auxiliary inequality constrained problem which is defined by
is a penalty parameter. Therefore, our approach consists of solving an auxiliary inequality constrained problem which is defined by
 (1.5)
(1.5)
2. Preliminaries and Algorithm
For the sake of simplicity, we denote
 (2.1)
(2.1)
Throughout this paper, the following basic assumptions are assumed.
H 2.1. The feasible set of (1.1) is nonempty, i.e., .
.
H 2.2. The functions
 are twice continuously differentiable.
are twice continuously differentiable.
H 2.3. , the vectors
, the vectors
 are linearly independent.
are linearly independent.
The following definition and proposition can be refereed to in [13] .
Definition 2.1. Suppose that
 satisfies the so-called nondegeneracy condition:
satisfies the so-called nondegeneracy condition:
 (2.2)
(2.2)
If there exists multipliers
 such that
such that
 (2.3)
(2.3)
 (2.4)
(2.4)
hold, then
 is said to be a
is said to be a
 point of (1.1).
point of (1.1).
Proposition 2.1. Suppose that
 satisfies the so-called nondegeneracy condition (2.2), then
satisfies the so-called nondegeneracy condition (2.2), then
 is a
is a
 point of (1.1) if and only if
point of (1.1) if and only if
 satisfies
satisfies
 (2.5)
(2.5)
 (2.6)
(2.6)
where
 (2.7)
(2.7)
 and.
and.
Proposition 2.2. (1) s is a feasible point of (1.1) if and only if
 with
with
 is a feasible point of (1.4).
is a feasible point of (1.4).
(2)
 is a
is a
 point of (1) if and only if
point of (1) if and only if
 with
with
 is a
is a
 point of (1.4).
point of (1.4).
Proof. (1) According to the property of function , the conclusion follows immediately from (1.3).
, the conclusion follows immediately from (1.3).
(2) Suppose that
 is a
is a
 point of (1.1). If set
point of (1.1). If set
 and
and , then, from (1), we see
, then, from (1), we see
 is a feasible point of (1.4). While, it follows from proposition 2.1 that there exists vector
is a feasible point of (1.4). While, it follows from proposition 2.1 that there exists vector
 such that (2.5) and (2.6) hold. Define
such that (2.5) and (2.6) hold. Define
 (2.8)
(2.8)
So, it is not difficult to prove that
 satisfies the
satisfies the
 system of (1.4), according to (1.3), (2.5) and (2.6).
system of (1.4), according to (1.3), (2.5) and (2.6).
Conversely, if
 is a
is a
 point of (1.4), then it follows that
point of (1.4), then it follows that
 and
and ,
,
which shows that
 is a feasible point of (1.1). Suppose
is a feasible point of (1.1). Suppose
 is a
is a
 multiplier corresponding to
multiplier corresponding to
 of (1.4). Define
of (1.4). Define
 as follows:
as follows:
 (2.9)
(2.9)
Then, it is easy to see, from (1.2) and the
 system of (4) at
system of (4) at , that
, that
 with the multiplier
with the multiplier
 satisfies (2.5) and (2.6). Therefore, we assert
satisfies (2.5) and (2.6). Therefore, we assert
 is a
is a
 point of (1.1) according to proposition 2.1.
point of (1.1) according to proposition 2.1.
Now, we present the definition of multiplier function associated with
 -active set [14] .
-active set [14] .
Definition 2.2. A continuous function
 is said to a multiplier function, if
is said to a multiplier function, if
 satisfies the
satisfies the
 system of (1.5) with corresponding multipliers
system of (1.5) with corresponding multipliers .
.
Firstly, for a given point , by using the pivoting operation, we obtain an approximate active
, by using the pivoting operation, we obtain an approximate active .
.
Algorithm A:
Step 1. For the current point
 and parameter
and parameter . Set
. Set ,
, ;
;
Step 2. If , let
, let , stop; otherwise, goto Step 3, where
, stop; otherwise, goto Step 3, where
 (2.10)
(2.10)
Step 3. ,
,
 , go back to Step 2.
, go back to Step 2.
Lemma 2.1. For any iteration index k, algorithm A terminates in finite iteration.
For the current point
 and
and
 -active set
-active set , compute
, compute
 (2.11)
(2.11)
Now we give some notations and the explicit search direction in this paper.
 (2.12)
(2.12)
 (2.13)
(2.13)
 (2.14)
(2.14)
 (2.15)
(2.15)
 (2.16)
(2.16)
where .
.
According to the above analysis, the algorithm for the solution of the problem (1.1) can be stated as follows.
Algorithm B:
Step 0. Given a starting point , and an initial symmetric positive definite matrix
, and an initial symmetric positive definite matrix .
.
Choose parameters .
.
Step 1. By means of Algorithm A, compute
 and
and .
.
Step 2. Compute
 according to (2.13). If
according to (2.13). If , stop; otherwise, compute
, stop; otherwise, compute
 according to (2.14). If
according to (2.14). If
 (2.17)
(2.17)
goto Step 3; otherwise, goto Step 4.
Step 3. Let .
.
(1) If
 (2.18)
(2.18)
 (2.19)
(2.19)
Set , goto Step 5.
, goto Step 5.
(2) Let . if
. if , goto Step 4; otherwise, repeat (1).
, goto Step 4; otherwise, repeat (1).
Step 4. Obtain feasible descent direction
 from (2.16), and compute βk, the first number β in the sequence
from (2.16), and compute βk, the first number β in the sequence
 satisfying
satisfying
 (2.20)
(2.20)
 (2.21)
(2.21)
Let .
.
Step 5. Define ,
,
 and set
and set
 (2.22)
(2.22)
and . Obtain
. Obtain
 by updating the positive definite matrix
by updating the positive definite matrix
 using some quasi- Newton formulas, and set k = k + 1. Go back to Step 1.
using some quasi- Newton formulas, and set k = k + 1. Go back to Step 1.
In the remainder of this section, we give some results to show that Algorithm B is correctly stated.
Lemma 2.2. (1) If , then we have
, then we have
 (2.23)
(2.23)
 (2.24)
(2.24)
(2) If the sequence
 is bounded, then there exists a constant
is bounded, then there exists a constant
 such that
such that
 (2.25)
(2.25)
Proof. (1) If , then
, then

In view of , we get
, we get . Since
. Since

so we have
 (2.26)
(2.26)
(2) Note that the boundedness of sequence
 and
and
 positive definite, we know that
positive definite, we know that
 are bounded. By (2.16), there exists constant
are bounded. By (2.16), there exists constant
 such that
such that . Thus, there exists constant
. Thus, there exists constant
 such that
such that

So, the claim holds.
According to Lemma 2.2 and the continuity of functions
 and
and , the following result is true.
, the following result is true.
Lemma 2.3. Algorithm B is well defined.
3. Global Convergence
In this section, we consider the global convergence of the algorithm B. Firstly, we show that
 is an exact stationary point of (1.1) if the Algorithm B terminates at the current iteration point
is an exact stationary point of (1.1) if the Algorithm B terminates at the current iteration point .
.
Lemma 3.1. (1)
 is a K − T point of (1.5) if and only if
is a K − T point of (1.5) if and only if .
.
(2) If
 is a
is a
 point of (1.5), then
point of (1.5), then
 with
with
 is a K − T point of (1.4).
is a K − T point of (1.4).
Proof. (1) If
 is a K − T point of (1.5), then from the definition of index set Jk, we know the K − T multiplier corresponding to constraints about index
is a K − T point of (1.5), then from the definition of index set Jk, we know the K − T multiplier corresponding to constraints about index
 is 0. Thus, there exists vector
is 0. Thus, there exists vector
 such that
such that
 (3.1)
(3.1)
Note that matrix
 is full of column rank, and
is full of column rank, and
 positive definite. Thus we have
positive definite. Thus we have
 exists. Furthermore, it follows from (3.1) that
exists. Furthermore, it follows from (3.1) that

By (2.14) and (3.1), we have

so

On the other hand, it is easy to verify that

It follows from
 that
that

From the positive definiteness of
 and (2.12), (2.13) and (2.14), we have
and (2.12), (2.13) and (2.14), we have
 (3.2)
(3.2)
which implies that
 is a
is a
 point of (1.5).
point of (1.5).
(2) In view of the definition of , we obtain from (3.2) that
, we obtain from (3.2) that
 (3.3)
(3.3)
Since the vectors
 are linearly independent, we have
are linearly independent, we have

i.e.

Thus, we deduce
 (3.4)
(3.4)
In view of the definition of penalty parameter , from (3.4), we have
, from (3.4), we have
 (3.5)
(3.5)
Combining with (3.2) and (3.5), it holds that
 (3.6)
(3.6)
Let
 where
where . From (3.3) and (3.6), we can easily see that
. From (3.3) and (3.6), we can easily see that
 is a K − T point pair of (1.4).
is a K − T point pair of (1.4).
Theorem 3.1. Suppose the nondegeneracy condition holds at . If
. If
 is a K − T point of (1.4), then
is a K − T point of (1.4), then
 is a K − T point of (1.1).
is a K − T point of (1.1).
Proof. According to the K − T system of (1.4) and the relationship of index i and j in (2.1), we see that
 (3.7)
(3.7)
Then, combining with Proposition 2.1 and Proposition 2.2, we can conclude that
 is a K − T point of (1.1).
is a K − T point of (1.1).
In the sequel, it is assumed that the Algorithm B generates an infinite sequence . The following further assumption about
. The following further assumption about
 is required in subsequent discussions.
is required in subsequent discussions.
H 3.1. (1) The sequence
 is bounded.
is bounded.
(2) The accumulation point
 of infinite sequence
of infinite sequence
 satisfies (2.2).
satisfies (2.2).
From H 3.1 and the fact that there are only finitely many choices for sets , we may assume that there exists a subsequence K, such that
, we may assume that there exists a subsequence K, such that
 (3.8)
(3.8)
where J is a constant set. Correspondingly, the following results hold:

Lemma 3.2. Suppose , then for
, then for
 large enough, we have
large enough, we have
(1) there exists a constant
 such that
such that .
.
(2) there exists a constant
 such that
such that .
.
Proof. (1) suppose, by contradiction, that there exists an index set
 such that
such that . Let
. Let . For
. For
 large enough, from Algorithm A, we have
large enough, from Algorithm A, we have
 (3.9)
(3.9)
Since there are only finite possible subsets of , there must be an infinite subset
, there must be an infinite subset
 such that for any
such that for any . Thus, it follows from (3.9) that
. Thus, it follows from (3.9) that
 (3.10)
(3.10)
which contradicts the condition H 2.3.
(2) Suppose by contradiction, there exists a subsequence
 such that
such that , then from the definition of
, then from the definition of , we have
, we have
 (3.11)
(3.11)
From the finite selectivity of , we can suppose without loss of generality that
, we can suppose without loss of generality that . By (1), we can see that
. By (1), we can see that
 is bounded, i.e.,
is bounded, i.e.,
 for some
for some . Let M be such an integer that
. Let M be such an integer that , then we have
, then we have

a contradiction, and the result is proved.
Lemma 3.3. Suppose that , and
, and
 which is generated by Step 4 and Step 5. If
which is generated by Step 4 and Step 5. If
 is not a
is not a
 point of (1.5), then we have
point of (1.5), then we have
(1) ,
,
(2) .
.
Proof. (1) Suppose . Since
. Since
 is not a
is not a
 of (1.5), so we have
of (1.5), so we have
 and
and

Therefore, for
 large enough, we obtain
large enough, we obtain
 (3.12)
(3.12)
(2) For (2.20), denote

From (3.12), for
 large enough and
large enough and
 small enough, it holds that
small enough, it holds that .
.
For (2.21), when , the fact
, the fact
 and the continuity of
and the continuity of
 imply that (4.5) holds. When
imply that (4.5) holds. When , it holds that
, it holds that . From (3.12), for
. From (3.12), for
 large enough and
large enough and
 small enough, we have
small enough, we have

According to the analysis above, the result is true.
Lemma 3.4. Algorithm B generates infinite sequence , whose any accumulation points
, whose any accumulation points
 are
are
 points of (1.1).
points of (1.1).
Proof. Suppose that . From (2.17), (2.18), (2.20) and Lemma 2.2, we know that
. From (2.17), (2.18), (2.20) and Lemma 2.2, we know that
 is a descent sequence. While, for
is a descent sequence. While, for , it is obvious that
, it is obvious that . So
. So
 (3.13)
(3.13)
Now we consider the following two cases:
(1) Suppose there exists an infinite subset
 such that
such that

which is obtained by Step 3 and Step 5. In view of
 in Step 3, it follows from (2.17) and (2.18) that
in Step 3, it follows from (2.17) and (2.18) that

Obvious, . Again,
. Again,
 , so we have
, so we have . Imitating the proof of Lemma 3.1, it is easy to see that
. Imitating the proof of Lemma 3.1, it is easy to see that
 is a
is a
 point of (1.5).
point of (1.5).
(2) Assume the iteration
 is generated by Step 4 and Step 5. Suppose by contradiction that
is generated by Step 4 and Step 5. Suppose by contradiction that
 is not a
is not a
 point of (1.5). Then, from (3.12) and Lemma 3.3, we have
point of (1.5). Then, from (3.12) and Lemma 3.3, we have

which is a contradiction. Thus, the claim holds.
Theorem 3.2. The
 point
point
 of (1.5) must be the one of (1.4), where
of (1.5) must be the one of (1.4), where .
.
Proof. If
 is a
is a
 point of (1.5), then there exists multiplier
point of (1.5), then there exists multiplier
 such that
such that
 (3.14)
(3.14)
Set

Obvious, . While, from (3.14) we get
. While, from (3.14) we get

i.e.

Thereby,
 (3.15)
(3.15)
According to the definition of , it is clear that
, it is clear that
 (3.16)
(3.16)
In addition, combining with (3.2) (3.16), we obtain
 (3.17)
(3.17)
Let , where
, where . It follows from (3.14) and (3.17) that
. It follows from (3.14) and (3.17) that
 is a
is a
 point pair of (1.4).
point pair of (1.4).
Theorem 3.3. Suppose (2.2) holds at . If
. If
 is a
is a
 point of (1.4), then
point of (1.4), then
 is a
is a
 point of (1.1).
point of (1.1).
Proof. According to Theorem 3.2 and (2.1), Proposition 2.1 and Proposition 2.2 imply
 is a
is a
 point of (1.1).
point of (1.1).
4. Superlinear Convergence
Now we discuss the convergence rate of the Algorithm B, and prove that the sequence
 generated by the Algorithm B is one-step superlinearly convergent. For this purpose, we add some stronger regularity assumptions.
generated by the Algorithm B is one-step superlinearly convergent. For this purpose, we add some stronger regularity assumptions.
H 4.1. The bounded sequence
 possesses an accumulation point
possesses an accumulation point , at which second-order sufficiency condition and strict complementary slackness hold, where
, at which second-order sufficiency condition and strict complementary slackness hold, where
 is the corresponding multiplier of
is the corresponding multiplier of .
.
Lemma 4.1. Under H 2.1-H 4.2, we have that

Proof. For
 generated by Step 3 and Step 5, from (2.17) and (2.18), it holds that
generated by Step 3 and Step 5, from (2.17) and (2.18), it holds that

While, for
 generated by Step 4 and Step 5, from (2.17), (2.20) and Lemma 2.2, we have
generated by Step 4 and Step 5, from (2.17), (2.20) and Lemma 2.2, we have

So

Passing to the limit
 and from (3.13), we obtain
and from (3.13), we obtain

Thereby

Theorem 4.1. The entire sequence
 converges to
converges to , i.e.,
, i.e., .
.
In order to obtain the superlinear convergence rate, we make the following assumption.
H 4.2.
 positive definite.
positive definite.
Lemma 4.2. If H 2.1-H 4.2 hold, then we get that
(1) for k large enough, .
.
(2) .
.
Proof. (1) On one hand, by Lemma 3.2, for k large enough, there exists a constant
 such that
such that
 in Algorithm A. It follows from H 4.1 and the fact
in Algorithm A. It follows from H 4.1 and the fact
 that, for k large enough,
that, for k large enough, .
.
On the other hand, we assert that . Otherwise, there exists some index t and infinite subset K such that
. Otherwise, there exists some index t and infinite subset K such that

Let , then
, then

It is a contradiction with the complementary slackness condition, which shows that , i.e.,
, i.e., .
.
(2) According to
 and
and , the fact
, the fact
 implies
implies . Again, since
. Again, since
 is a
is a
 point of (1.5), imitating the proof of Lemma 3.1, we get that
point of (1.5), imitating the proof of Lemma 3.1, we get that

So the uniqueness of
 multiplier shows
multiplier shows .
.
Lemma 4.3. Under H 2.1-H 4.2, for k large enough,
 with the corresponding multiplier
with the corresponding multiplier
 is a
is a
 point of the following quadratic program
point of the following quadratic program
 (4.1)
(4.1)
Proof. Suppose that
 is a
is a
 point pair of (4.1). From (2.12), (2.14) and (4.1), it holds that
point pair of (4.1). From (2.12), (2.14) and (4.1), it holds that

In addition, for k large enough,
 holds from fact
holds from fact
 and strict complementarity condition. While, from the definition of
and strict complementarity condition. While, from the definition of , it holds that
, it holds that . So the claim holds.
. So the claim holds.
Lemma 4.4. (1) For k large enough, there exist constants
 such that
such that
 (4.2)
(4.2)
(2)
 obtained by (2.15) satisfies
obtained by (2.15) satisfies
 (4.3)
(4.3)
Proof. (1) Since , and for k large enough,
, and for k large enough,
 , it is easy to see
, it is easy to see
 (4.4)
(4.4)
Obviously, for k large enough, . Thereby, there exists a constant
. Thereby, there exists a constant
 such that
such that

In addition, from Lemma 4.3, we see
 (4.5)
(4.5)
So
 (4.6)
(4.6)
(2) Since

we know

From
 and the boundedness of
and the boundedness of , it follows that
, it follows that

So, the result is true.
In order to obtain the superlinear convergence rate, we make another assumption.
H 4.3. The sequence of symmetric matrices
 satisfies
satisfies

where

Lemma 4.5. For k large enough, Algorithm B is not implemented on Step 4, and

holds in Step 3.
Proof. According to
 and Lemma 4.4, we have
and Lemma 4.4, we have

which shows (2.17) hold. Now we prove that, the arc search (2.19) and (2.18) eventually accept unit step, i.e.,
 , for k large enough.
, for k large enough.
Firstly, for (2.19), when , the fact that
, the fact that
 and the continuity of
and the continuity of
 imply
imply

when , using Taylor expansion, we get
, using Taylor expansion, we get
 (4.7)
(4.7)
Again, from

we see

Thus, (4.7) yields
 (4.8)
(4.8)
In view of , (2.19) obviously holds when
, (2.19) obviously holds when .
.
Secondly, we prove that, for k large enough, (2.18) holds for . Denote
. Denote
 (4.9)
(4.9)
From (4.5), we have

Also, by (4.8), it holds that

So

Thus, (4.6) yields

Denote , then
, then . Set
. Set
 (4.10)
(4.10)
Clearly,

while, from (2) and (10), it holds that

So

which implies the theorem hold.
According to Lemma 4.3, Lemma 4.4 and Lemma 4.5, combining with Theorem 12.3.3 in [15] , the following state holds.
Theorem 4.2. The Algorithm B is superlinearly convergent, i.e.,

5. Conclusion
By means of perturbed technique and generalized complementarity function, we, using implicit smoothing strategy, equivalently transform the original problem into a family of general optimization problems. Based on the idea of penalty function, the discussed problem is transformed an associated problem with only inequality constraints containing parameter. And then, by providing explicit searching direction, a new variable metric gradient projection method for MPCC is established. The smoothing factor
 regarded as a variable ensures that we can obtain an exact stationary point of original problem once the algorithm terminates in finite iteration. What’s more, the proposed algorithm adjusts penalty parameter automatically. Under some mild conditions, the global convergence is obtained as well as the superlinear convergence rate.
regarded as a variable ensures that we can obtain an exact stationary point of original problem once the algorithm terminates in finite iteration. What’s more, the proposed algorithm adjusts penalty parameter automatically. Under some mild conditions, the global convergence is obtained as well as the superlinear convergence rate.
Acknowledgements
The authors are indebted to the anonymous referees for valuable comments and remarks that helped them improve the original version of the paper.
Funding
This work was supported in part by the National Natural Science Foundation (No. 11361018), the Natural Sci- ence Foundation of Guangxi Province (No. 2014GXNSFFA118001), the Key Program for Science and Techno- logy in Henan Education Institution (No. 15B110008) and Huarui College Science Foundation (No. 2014qn35) of China.
Cite this paper
CongZhang,LiminSun,ZhibinZhu,MingleiFang, (2015) An Implicit Smooth Conjugate Projection Gradient Algorithm for Optimization with Nonlinear Complementarity Constraints. Applied Mathematics,06,1712-1726. doi: 10.4236/am.2015.610152
References
- 1. Kocvara, M. and Outrata, J. (1994) On Optimization Systems Govern by Implicit Complementarity Problems. Numerical Functional Analysis and Optimization, 15, 869-887.
http://dx.doi.org/10.1080/01630569408816597 - 2. Fletcher, R., Leyffer, S., Ralph, D. and Scholtes, S. (2006) Local Convergence of SQP Methods for Mathematical Programs with Equilibrium Constraints. SIAM: SIAM Journal on Optimization, 17, 259-286.
http://dx.doi.org/10.1137/S1052623402407382 - 3. Luo, Z.Q., Pang, J.S. and Ralph, D. (1996) Mathmetical Programs with Equilibrium Constraints. Cambridge University Press, Cambridge.
http://dx.doi.org/10.1017/CBO9780511983658 - 4. Jiang, H. (2000) Smooth SQP Methods for Mathematical Programs with Nonlinear Complementarity Constaints. SIAM Journal of Optimization, 10, 779-808.
http://dx.doi.org/10.1137/S1052623497332329 - 5. Kocvara, M. and Outrata, J. (1995) A Nonsmmoth Approach to Optimization Problems with Equilibrium Constraints. In: Ierns, M.C. and Pang, J.D., Eds., Proceedings of the International Conference on Complementatity Problems, SIAM Publications, Baltimore, 148-164.
- 6. Outrata, J. (1990) On the Numberical Solution of a Class of Stachelberg Problems. Zeitschrift for Operations Research, 4, 255-278.
- 7. Zhang, C., Zhu, Z.B., Chen, F.H. and Fang, M.L. (2010) Sequential System of Linear Equations Algorithm for Optimization with Complementary Constraints. Mathematics Modelling and Applied Computing, 1, 71-80.
- 8. Zhang, C., Zhu, Z.B. and Fang, M.L. (2010) A Superlinearly Covergent SSLE Algorithm for Optimization Problems with Linear Complementarity Constraints. Journal of Mathematical Science: Advance and Application, 6, 149-164.
- 9. Huang, Z.H., Lin, G.H. and Xiu, N.H. (2014) Several Developments of Variational Inequalities and Complementarity Problems, Bilevel Programming and MPEC. Operations Research Transactions, 18, 113-133.
- 10. Zhang, C., Sun, L.M., Zhu, Z.B. and Fang, M.L. (2015) Levenberg-Marquardt Method for Mathematical Programs with Linearly Complementarity Constraints. American Journal of Computational Mathematics, 5, 239-242.
http://dx.doi.org/10.4236/ajcm.2015.53020 - 11. Outrata, J., Kocvara, M. and Zowe, J. (1998) Nonsmmoth Approach to Aptimization Problems with Equilibrium Constraints. Kluwer Academic Publishers, The Netherland.
http://dx.doi.org/10.1007/978-1-4757-2825-5 - 12. Gao, Z.Y., He, G.P. and Wu, F. (2004) Sequential Systems of Linear Equations Algorithm for Nonlinear Optimization Problems—General Constrained Problems. Applied Mathematics and Computation, 147, 211-226.
http://dx.doi.org/10.1016/S0096-3003(02)00662-8 - 13. Jian, J.B., Qin, Y. and Liang, Y.M. (2007) A Generalized Strongly Sub-Feasible Algorithm for Mathematical Problems with Nonliear Complementarity Constraints. Numerical Mathematics: A Journal of Chinese Universities, 29, 15-27.
- 14. Zhu, Z.B. and Zhang, K.C. (2004) A New Conjugate Projuction Gradient Method and Superlinear Convergence. Acta Mathematicae Applicatae Sinica, 27, 149-161.
- 15. Yuan, Y.X. and Sun, W.Y. (1997) Optimization Theory and Method. Science Press, Beijing.
NOTES

*Corresponding author.