Y. H. Tang
GS
Generator
and excitation
Francis turbine
and governortransformer
Load of the
hydro plantLoad
I
n
f
i
n
i
t
e
b
u
s
line
u
p
s
t
r
e
a
m
Water
conduit
transformer
Figure 5. Simulation system general view.
3.1. Simulation of the Two-Segment Closing Characteristic of Actuating Mechanism
In the load rejection study, the simulation system is shown in Figure 5. The length of the water conduit of
Xiaowan hydroelectric power station is no more than 800 m. Thus the rigid model of water column was applied.
The actuating mechanism model developed in this paper and IEEE nonlinear turbine model were used to repre-
sent the turbine-governor.
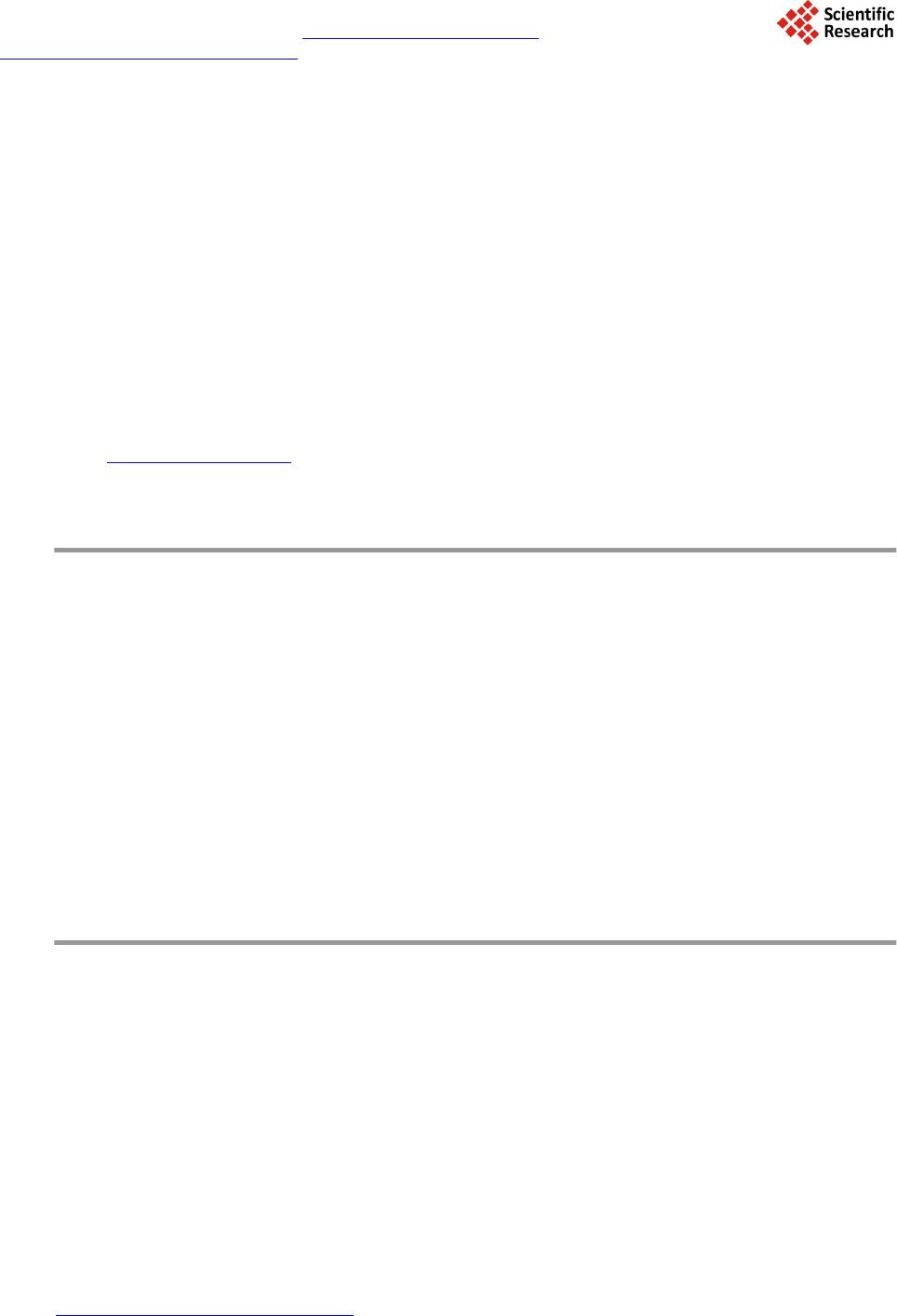
Different value of inflection point was set respectively in order to study the influence of the two-segment
closing characteristic. The generator trips when t = 8 s. The 100% load rejection simulation results are shown in
Figure 6.
It can be seen from Figure 6:
There is an observable difference between the simulation results of four types of inflection point value. With
the increasing of inflection point setting value, the over-speed event will be more serious during the load rejec-
tion. The dynamic time lasts longer and the maximum deviation of the frequency excursion increases. The same
phenomenon resulting from serious over-speed happens in the dynamics of other electrical quantities, including
generator voltage, rotor angle, electrical power.
3.2. Validation of the Actuating Mechanism Model
The actuating mechanism model in Figure 2 and BPA model were applied to the actuating mechanism open/
close test of Xiaowan Unit #2. The recorded output of PID controller was used to drive the model response.
Figure 7 shows the comparison of simulated and recorded responses.
It can be seen from Figure 7:
1) Both of the improved model and the BPA model can correctly simulate the gate-opening process, and the
response of the improved model is more accurate.
2) The measured governor response (gate position) and the simulated response of the improved model are in
very close agreement in the process of gate-closing, while the BPA model can’t reflect the step closing charac-
teristic.
3) The actuating mechanism closes the guide vane according to speed limit of each section. And the inflection
point value of Xiaowan 2# unit is 0.13.
3.3. Validation of the Francis Turbine and Governor Models
The validation is based on power-raising test of Xiaowan 2# unit.
The rated head of the turbine is 216 m, and the rated power is 700 MW. The actual head is 171 m, and the
maximum power is about 470 MW.
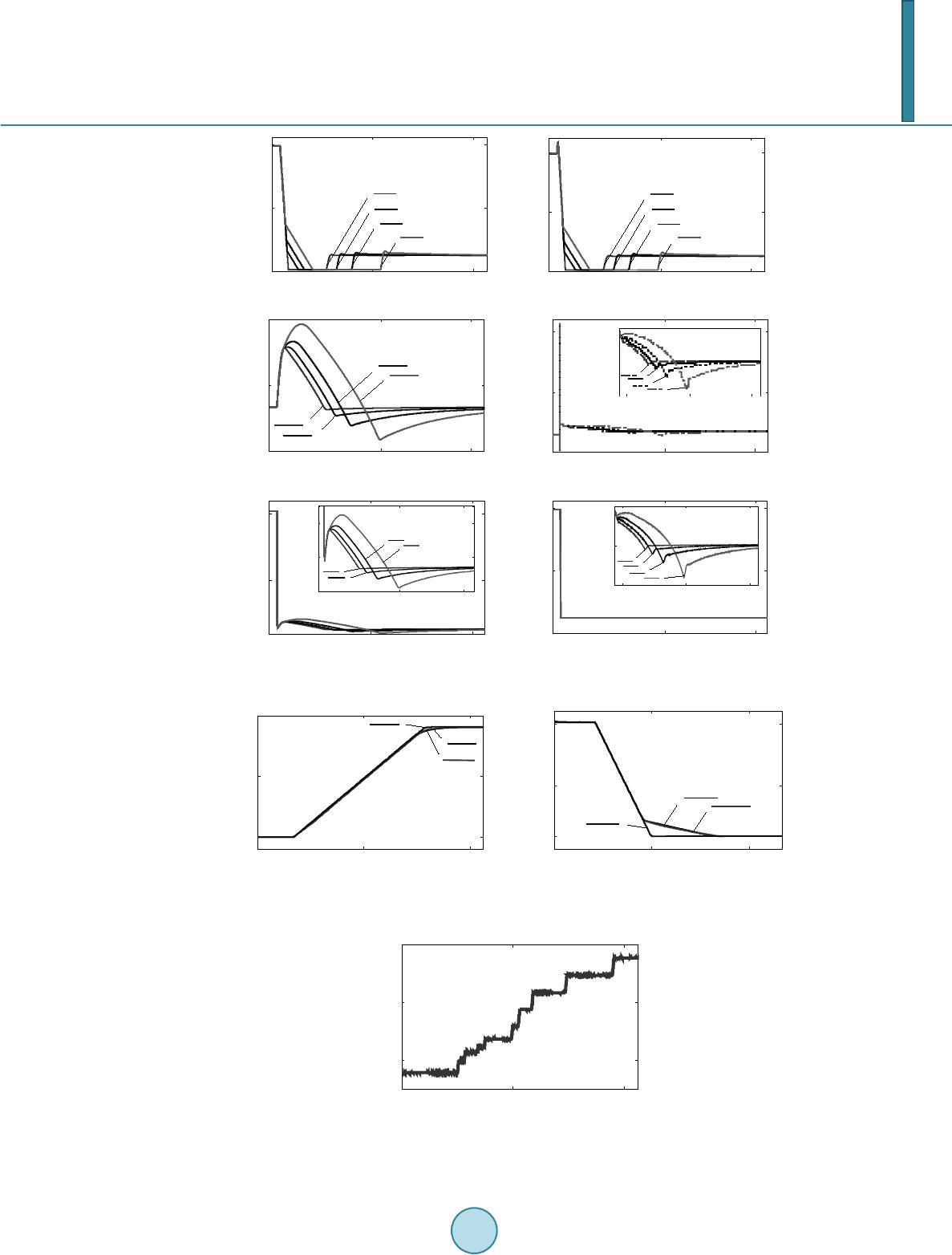
#2 unit online, 210 - 350 MW power-raising test was conducted by stepping the power reference, using type
TCFZ-35A multifunctional tester for hydro turbine governing system to record the input signal of governor, step
responses of relative variables, including gate position and electrical power. The actual power reference signal is
shown in Figure 8.
In the simulation, the rigid model of water column was used, and four model combinations were applied to
represent the turbine-governor system:
Combination 1: The Francis turbine and governor improved models proposed in this paper;
Combination 2: IEEE nonlinear turbine model and the improved actuating mechanism model in Figure 2;
Combination 3: BPA ideal turbine model and the improved actuating mechanism model in Figure 2;