B. P. DAS ET AL.
Copyright © 2011 SciRes. EPE
134
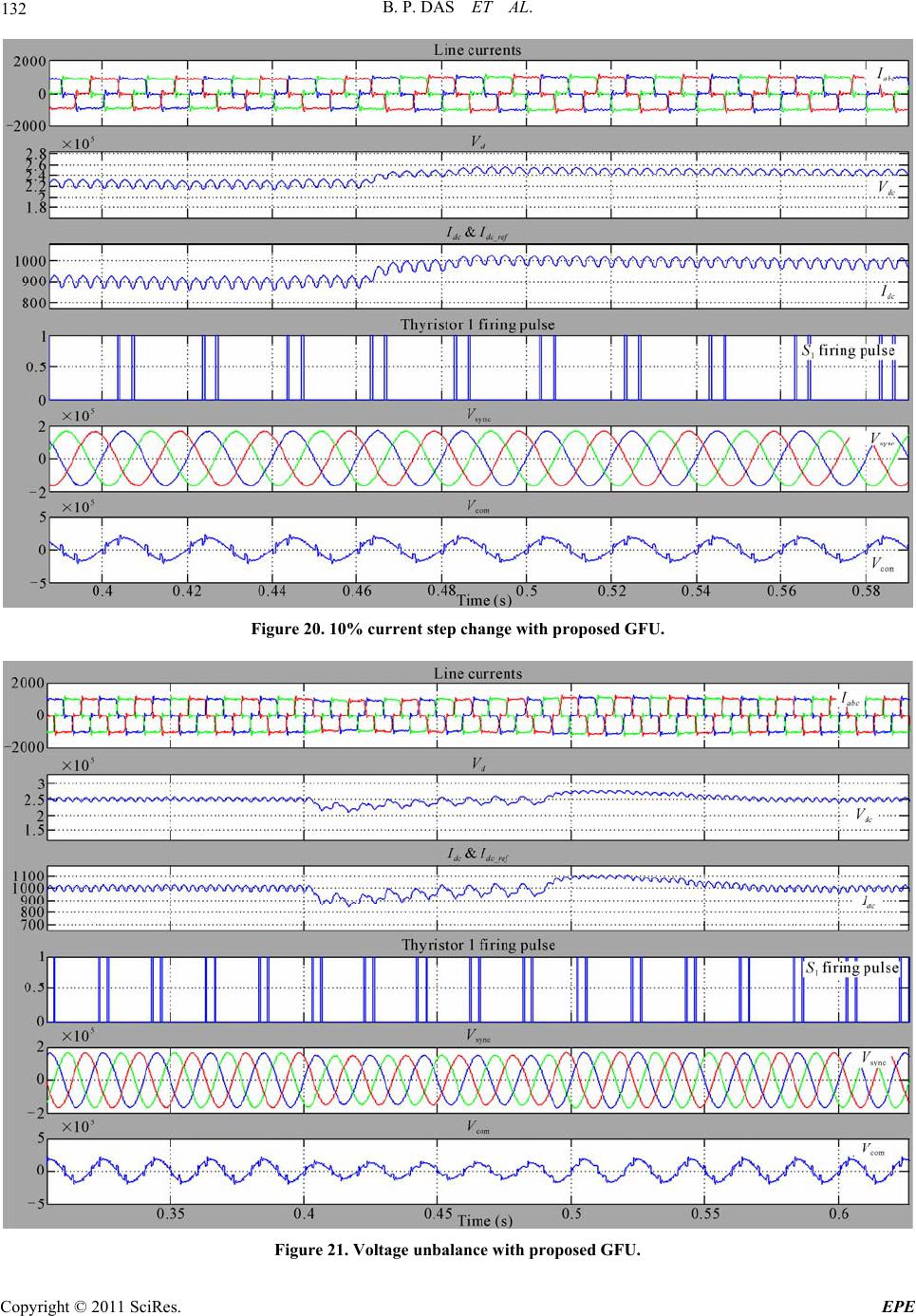
Table 1. Shows the comparison with trans-vector type GFU.
Condition Trans-vector Proposed
Start-up 60 ms 20 ms
10% step change in Idc 30 ms 20 ms
Voltage unbalance 100 ms 50 ms
DC line fault 80 ms 20 ms
Open loop start up ------ 10 ms
Open loop voltage sag ------ 10 ms
The GFU is immune to mains voltage unbalance, har-
monics, voltage sag, phase jump, frequency variation etc.
Also, there is no stability or tuning issue involved. Fur-
ther, work in extending this to a complete HVDC system
is planned.
6. References
[1] The Joint Research Centre (JRC), European Union, “To-
wards the Super Grid for More Renewable Energy,” 5
July 2010.
[2] V. Khatri, V. K. Sood and H. Jin, “Analysis and EMTP
Simulation of a Conventional Gate Firing Unit for HVDC
Converters Operating with Weak AC Systems,” Pro-
ceedings of the 1994 Canadian Conference on Electrical
and Computer Engineering, Halifax, 25-28 September
1994, pp. 173-177. doi: 10.1109/CCECE.1994.405634
[3] V. Khatri, V. K. Sood and H. Jin, “EMTP Simulation of
an HVDC Rectifier Operating with a Weak AC System,”
Proceedings of the IEEE 4th Workshop on Computers in
Power Electronics, Trois-Rivieres, 7-10 August 1994, pp.
91-95. doi: 10.1109/CIPE.1994.396733
[4] V. K. Sood, V. Khatri and H. Jin, “Performance Assess-
ment Using EMTP of Two Gate Firing Units for HVDC
Converters Operating with Weak AC Systems,” Pro-
ceedings of the International Conference on Power Sys-
tem Transients, Technical University of Lisbon, Portugal,
3-7 September 1995, pp. 517-522.
[5] J. D. Ainsworth, “The Phase-Locked Oscillator: A New
Control System for Controlled Static Convertors,” IEEE
Transactions on Power Apparatus and Systems, Vol.
PAS-87, No. 3, 1968, pp. 859-865.
doi:10.1109/TPAS.1968.292202
[6] S. K. Chung, “A Phase Tracking System for Three Phase
Utility Interface Inverters,” IEEE Transactions on Power
Electronics, Vol. 15, No. 3, 2000, pp. 431-438.
doi:10.1109/63.844502
[7] J. A. Crawford, “Advanced Phase Lock Techniques,”
Artech House, London, 2008.
[8] R. Weidenbrüg, F. Dawson and R. Bonert, “New Syn-
chronization Method for Thyristor Power Converters to
Weak AC-Systems,” IEEE Transactions on Industrial
Electronics, Vol. 40, No. 5, 1993, pp. 505-511.
doi:10.1109/41.238019
[9] S. Väliviita, “Zero-Crossing Detection of Distorted Line
Voltages Using 1-B Measurements,” IEEE Transactions
on Industrial Electronics, Vol. 46, No. 5, 1999, pp. 917-
922. doi:10.1109/41.793339
[10] S.-J. Lee, J.-K. Kang and S.-K. Sul, “A New Phase De-
tecting Method for Power Conversion Systems Consider-
ing Distorted Conditions in Power System,” Proceedings
of the 34th IAS Annual Meeting Industry Applications
Conference, Phoenix, 3-7 October 1999, pp. 2167-2172.
doi: 10.1109/IAS.1999.798754
[11] P. Rodriguez, L. Sainz and J. Bergas, “Synchronous Dou-
ble Reference Frame PLL Applied to a Unified Power
Quality Conditioner,” Proceedings of the 10th Interna-
tional Conference on Harmonics and Quality of Power,
Vol. 2, 2002, pp. 614-619.
doi: 10.1109/ICHQP.2002.1221506
[12] D. Jovcic, “Phase Locked Loop System for FACTS,”
IEEE Transactions on Power Systems, Vol. 18, No. 3,
2003, pp. 1116-1124. doi:10.1109/TPWRS.2003.814885
[13] M. Karimi-Ghartemani and M. R. Iravani, “A Method for
Synchronization of Power Electronic Converters in Pol-
luted and Variable-Frequency Environments,” IEEE
Transactions on Power Systems, Vol. 19, No. 3, 2004, pp.
1263-1270. doi:10.1109/TPWRS.2004.831280
[14] M. Karimi-Ghartemani, H. Karimi and M. R. Iravani, “A
Magnitude/Phase-Locked Loop System Based on Estima-
tion of Frequency and in-Phase/Quadrature-Phase Am-
plitudes,” IEEE Transactions on Industrial Electronics,
Vol. 51, No. 2, 2004, pp. 511-517.
doi:10.1109/TIE.2004.825282
[15] Y. Han, L. Xu, M. M. Khan, G. Yao, L.-D. Zhou and C.
Chen, “A Novel Synchronization Scheme for Grid-Con-
nected Converters by Using Adaptive Linear Optimal
Filter Based PLL (ALOF- PLL),” Simulation Modelling
Practice and Theory, Vol. 17, No. 7, 2009, pp. 1299-
1345. doi:10.1016/j.simpat.2009.05.004
[16] Z. Yao, “Fundamental Phasor Calculation with Short
Delay,” IEEE Transactions on Power Delivery, Vol. 23,
No. 3, 2008, pp.1280-1287.
doi:10.1109/TPWRD.2008.916734
[17] B. P. Das, N. Watson and Y. Liu, “6-Pulse Controlled
Rectifier Synchronisation Method,” Proceedings of the
IEEE Applied Power Electronics Colloquium (IAPEC),
Malaysia, 18-19 April 2011, pp. 45-50.
[18] V. K. Sood, “HVDC and FACTS Controllers: Applica-
tions of Static Converters in Power Systems,” Kluwer
Academic Publishers, Boston, 2004.