Energy and Power En gi neering, 2011, 3, 107-112
doi:10.4236/epe.2011.32014 Published Online May 2011 (http://www.SciRP.org/journal/epe)
Copyright © 2011 SciRes. EPE
Energy Efficient Control of Three-Phase Induction
Motor Drive
Hussein Sarhan
Faculty of Engineering Technology, Al-Balqa’ Applied University, Salt, Jordan
E-mail: sarhan_52@hotmail.com
Received March 7, 2011; revised March 25, 2011; accepted March 29, 2011
Abstract
Induction motors are extensively used in industrial and household appliances and consume more than 50% of
the total generated electrical energy. The need for energy conservation is increasing the requirements for
saving the electrical energy. It is therefore important to optimize the efficiency of electrical drive systems
under certain operating conditions. This paper proposes a new control scheme based on search method taking
advantage of the fact, that at a certain torque and speed (operating point) there is only one value of stator
voltage that operates the motor at optimum efficiency. Simulation performed and results are presented.
Keywords: Induction Motor Drive, Efficiency Optimization, Slip Compensation
1. Introduction
Induction motors are the most used in industry since they
are rugged, inexpensive, and are maintenance free. It is
estimated that more than 50% of the world electric en-
ergy generated is consumed by electric machines. Im-
proving efficiency in electric drives is important, mainly
for economic saving and reduction of environmental
pollution [1,2]. Induction motors have a high efficiency
at rated speed and torque. However, at light loads, motor
efficiency decreases dramatically due to an imbalance
between the copper and the core losses. Hence, energy
saving can be achieved by proper selection of the flux
level in the motor [3,4 ]. The main inductio n motor losses
are usually split into: stator copper losses, rotor copper
losses, core (iron) losses, mechanical and stray losses. To
improve the motor efficiency, the flux must be reduced,
obtaining a balance between copper and core losses.
Many minimum-loss control schemes based on scalar
control or vector control of induction motor drives have
been reported in literature [4-8]. Induction motor drive
can be controlled according to a number of performance
functions, such as input power, speed, torque, airgap flux,
power factor, stator current, stator voltage, and overall
efficiency [9]. Basically, there are three strategies, which
are used in efficiency optimization of induction motor
drive: Simple state control, model based control, and
search control. Search strategy methods have an impor-
tant advantage compared to other strategies. It is com-
pletely insensitive to parameters changes, while effects
of the parameters variations caused by temperature and
saturation are very expressed in two other strategies
[10-12]. In this paper, an efficiency optimization con-
troller of induction motor drive system, based on search-
ing the value of stator voltage that maximizes the effi-
ciency, is developed. Then, the validity of the proposed
controller and the performance of the drive system were
analyzed by simulation results. To reduce the slip at light
loads and low frequencies, a slip compensator has been
introduced.
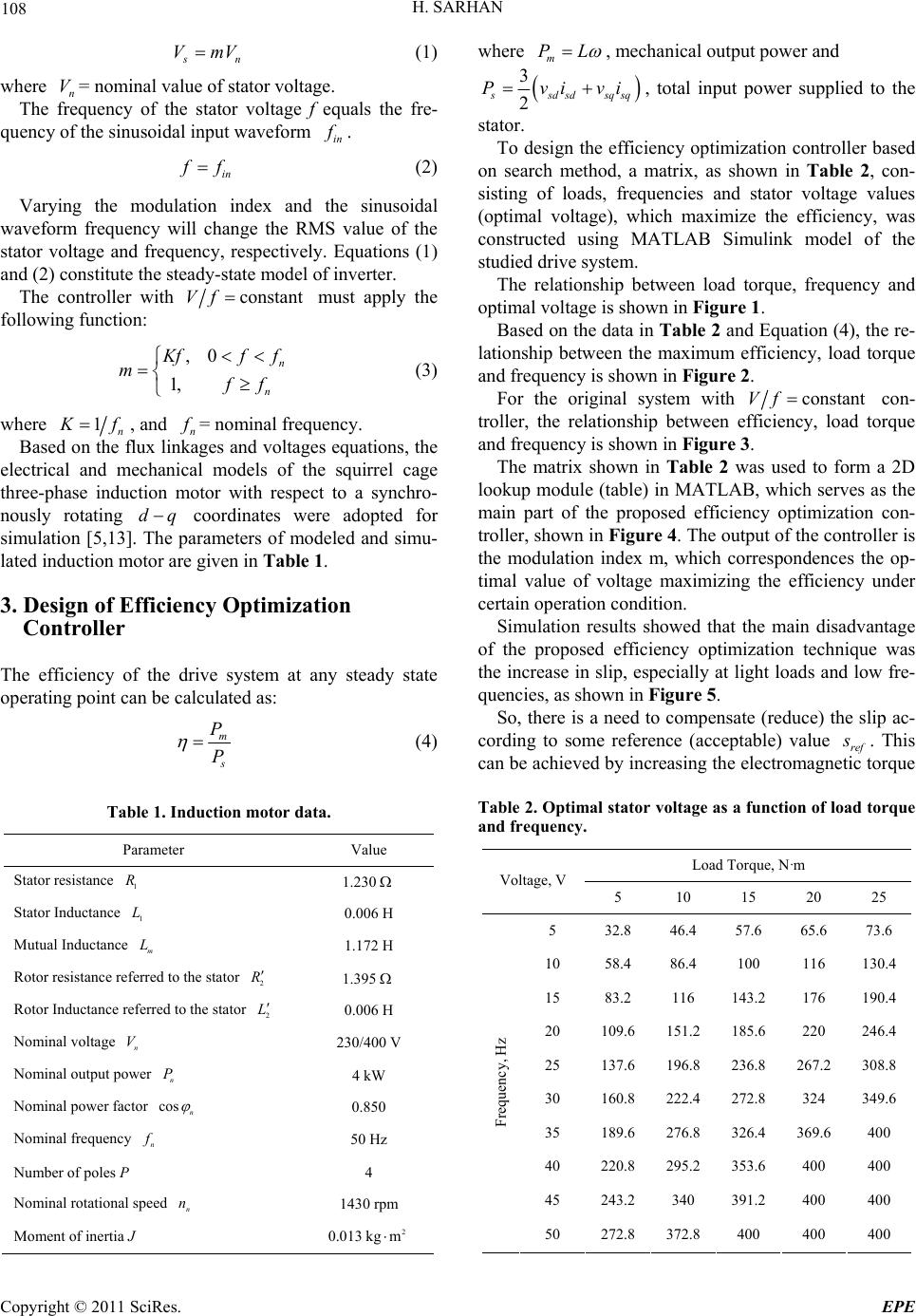
2. Modeling and Simulation of Drive System
The original drive system studied in this paper consists
of IGBT-inverter-based AC to AC converter, three-phase
squirrel cage induction motor and Vf
controller. In
order to analyze the system performance, all of these
components should be modeled (mathematically de-
scribed). The inverter-based AC-to-AC converter is con-
sidered to be an ideal system, where the DC voltage at
the input of the inverter has no AC component, and the
output voltage of the filter at the output of the inverter
has no harmonics. For sinusoidal pulse width modula-
tion SPWM, the ratio of the amplitude of the sinusoidal
waveform to the amplitude of the triangular waveform
is called the modulation index , which can be in the
range of 0 to 1 [5]. The stator voltage
m
V can be de-
fined as: