T. H. PHAM ET AL.
Copyright © 2011 SciRes. WSN
173
Finally, energy-saving operation is a certain require-
ment in the future implementation. Nodes when operat-
ing in energy-saving are able to alternate between sleep
and wake-up states. They would be in the sleep mode
most of the time and wake up when it is needed. Spe-
cifically, if there is no transmission or reception, each
node turns off unnecessary activities to save power.
When it has a message to send or there is a message
coming, it turns on these activities on to carry out the
process. Performance study about the effect of the pro-
posed CSPIN on other system parameters, such as power
dissipation, throughput, bit error rate and end-to-end de-
lay, were left for future work.
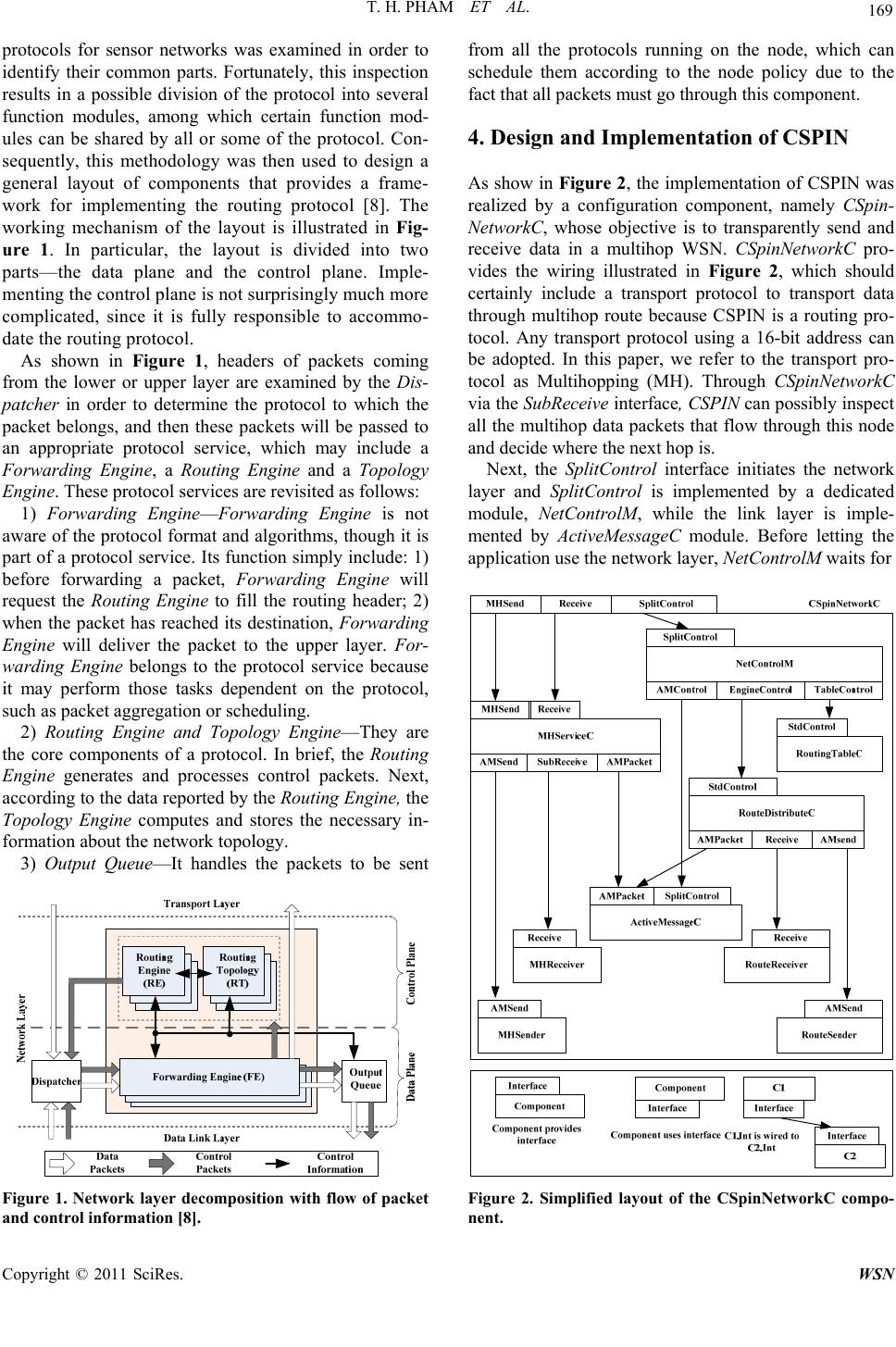
TestM Component
Interface3 Interface4 Interface5
Interface1 Interface2 Interface3 Interface4Interface5
Interface1 Interface2
Figure 8.The generic wiring of a test program.
8. References
[1] T. S. Rappaport, “Wireless Communications: Principles
and Practice,” 2nd Edition, Prentice Hall, New Jersey,
2002.
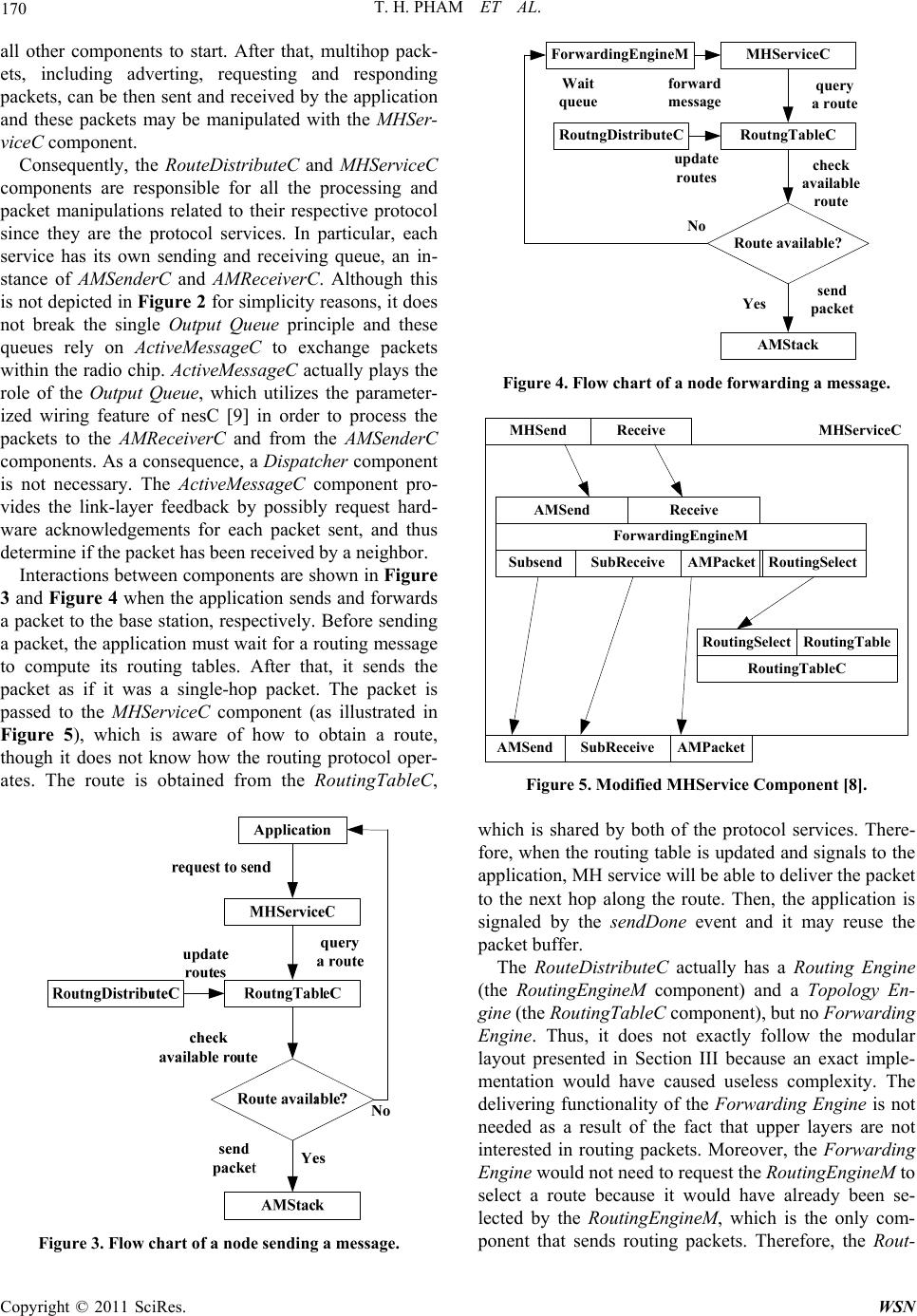
Figure 9. Four nodes topology with multihop routing.
[2] X. J. Li, B.-C. Seet and P. H. J. Chong, “Multihop Cellu-
lar Networks: Technology and Economics,” Computer
Networks, Vol. 52, No. 9, 2008, pp. 1825-1837.
doi:10.1016/j.comnet.2008.01.019
cal nodes. After simulation study by TOSSIM, we have
implemented CSPIN into CrossBow nodes to demon-
strate its functionality. Experimental results from Cross-
Bow nodes show that it works well. [3] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam and E.
Cayirci, “Wireless Sensor Networks: A Survey,” Com-
puter Networks, Vol. 38, No. 4, 2002, pp. 393-422.
doi:10.1016/S1389-1286(01)00302-4
7. Discussions and Conclusions
[4] H. Karl and A. Willig, “Protocols and Architectures for
Wireless Sensor Networks,” Wiley, New Jersey, 2005.
doi:10.1002/0470095121
The goal of this paper is to design and implement a data-
centric multihop routing protocol that is suitable for data
acquisition in wireless sensor networks. The results ob-
tained by CSPIN in a small WSN meet the design re-
quirements (centralized control and reduced redundant
transmission). However, performance of the CSPIN is yet
fully evaluated in terms of scalability, energy consumption
and comparison with other routing protocols due to tech-
nical issues. CSPIN still has much room for improvements.
Currently, it is only a simple disseminated routing proto-
col that supports multihop. There is no reliable communi-
cation over links, which heavily impacts on the network
performance when the size of the network gets bigger. As
a result, providing a reliable transmission over communi-
cation links is necessary. This will make sure the requ ests
reach the requested nodes and collected data arrive at the
base station without any loss.
[5] K. Akkaya and M. Younis, “A Survey on Routing Proto-
cols for Wireless Sensor Networks,” Ad Hoc Networks,
Vol. 3, No. 3, 2005, pp. 325-349.
doi:10.1016/j.adhoc.2003.09.010
[6] J. Kulik, W. Heinzelman and H. Balakrishnan, “Negotia-
tion-Based Protocols for Disseminating Information in
Wireless Sensor Networks,” Wireless Networks, Vol. 8,
No. 2-3, 2002, pp. 169-185.
doi:10.1023/A:1013715909417
[7] T. E. Cheng, R. Fonseca, S. Kim, D. Moon, A. Ta-
vakoli, D. Culler, S. Shenker and I. Stoica, “A
Modular Network Layer for Sensornets,” Proceed-
ings of ACM ODSI’06, Seattle, 6-8 November 2006,
pp. 249-262.
[8] “TinyOS Documentation Wiki,”
http://docs.tinyos.net/index.php/Tymo.
Next, another issue is the scalability of the WSN.
CSPIN can operate properly in small network because
the number of hops is small. If the network grows larger,
certain nodes have to handle more processes, which will
shorten the battery life of these nodes, and subsequently
cause data transmission interruptions. Furthermore, over-
flow control is therefore needed to manage these situa-
tions. Nodes are able to switch over limited transmis-
sions to the other nodes that are idle or have light com-
utational load.
[9] D. Gay, P. Levis, R. von Behren, M. Wel sh, E. Brewer and
D. Culler, “The NesC Language: A Holistic Approach to
Networked Embedded Systems,” Proceedings of ACM
SIGPLAN’03, San Diego, 11-13 June 2003, pp. 1-11.
[10] P. Levis and N. Lee, “TOSSIM: A Simulator for
TinyOS Networks,” Proceedings of the ACM SIG-
PLAN 2003 Conference on Programming Language
Design and Implementation, Vol. 38, No. 5, 2003,
pp. 1-11. doi:10.1145/781131.781133
p