Paper Menu >>
Journal Menu >>
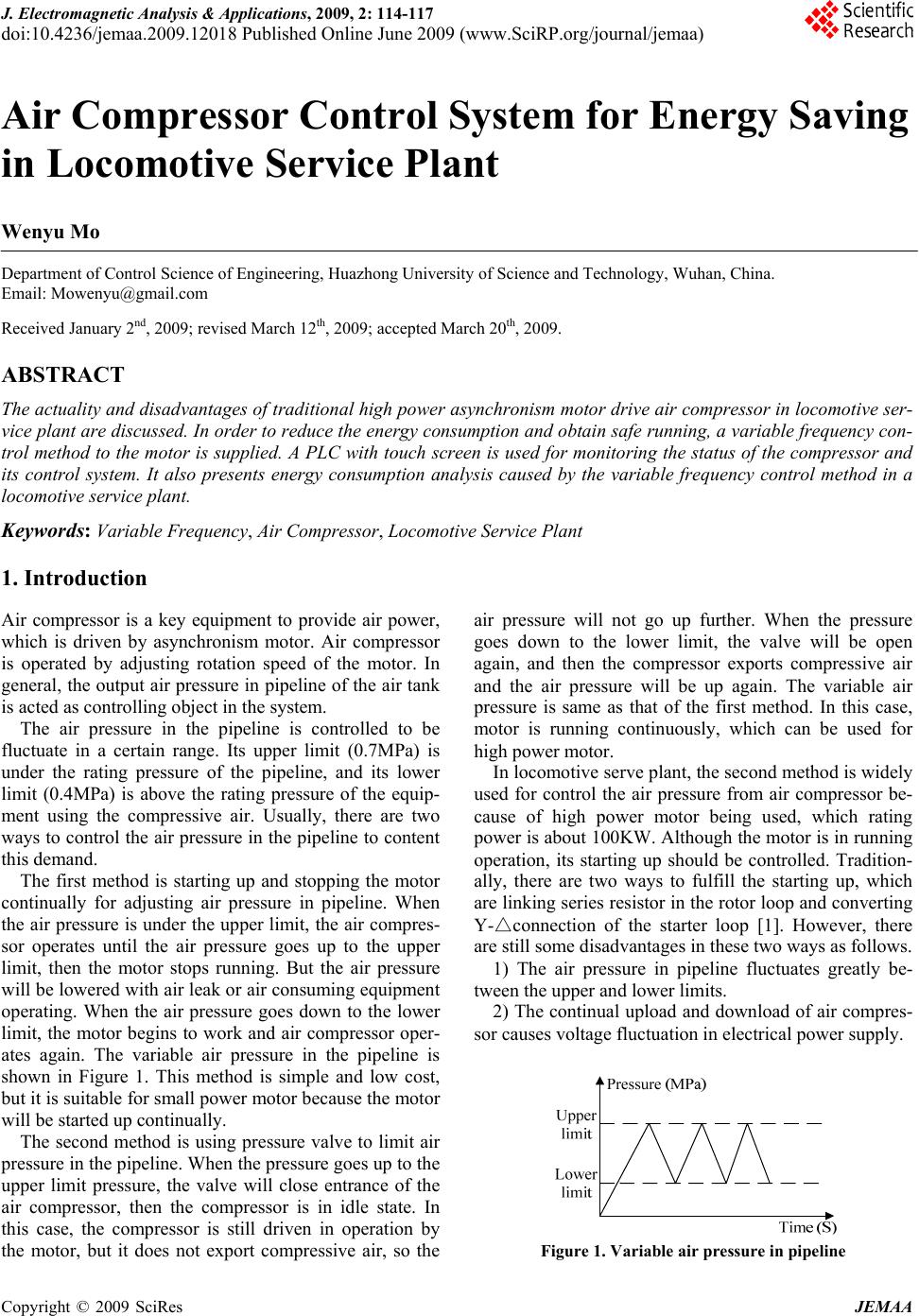 J. Electromagnetic Analysis & Applications, 2009, 2: 114-117 doi:10.4236/jemaa.2009.12018 Published Online June 2009 (www.SciRP.org/journal/jemaa) Copyright © 2009 SciRes JEMAA 1 Air Compressor Control System for Energy Saving in Locomotive Service Plant Wenyu Mo Department of Control Science of Engineering, Huazhong University of Science and Technology, Wuhan, China. Email: Mowenyu@gmail.com Received January 2nd, 2009; revised March 12th, 2009; accepted March 20th, 2009. ABSTRACT The actuality and disadvantages of traditional high power asynchronism motor drive air compressor in locomotive ser- vice plant are discussed. In order to reduce the energy consumption and obtain safe running, a variable frequency con- trol method to the motor is sup plied. A PLC with touch screen is used for monitoring the status of th e compressor and its control system. It also presents energy consumption analysis caused by the variable frequency control method in a locomotive service plant. Keywords: Variable Frequency, Air Compressor, Locomotive Service Plant 1. Introduction Air compressor is a key equipment to provide air power, which is driven by asynchronism motor. Air compressor is operated by adjusting rotation speed of the motor. In general, the output air pressure in pip eline of the air tank is acted as controlling object in the system. The air pressure in the pipeline is controlled to be fluctuate in a certain range. Its upper limit (0.7MPa) is under the rating pressure of the pipeline, and its lower limit (0.4MPa) is above the rating pressure of the equip- ment using the compressive air. Usually, there are two ways to control the air pressure in the pipeline to content this demand. The first method is starting up and stopping the motor continually for adjusting air pressure in pipeline. When the air pressure is under the upper limit, the air compres- sor operates until the air pressure goes up to the upper limit, then the motor stops running. But the air pressure will be lowered with air leak or air consuming equ ipment operating. When the air pressure goes down to the lower limit, the motor begins to work and air compressor oper- ates again. The variable air pressure in the pipeline is shown in Figure 1. This method is simple and low cost, but it is suitable for small power motor because the motor will be started up continually. The second method is using pressure valve to limit air pressure in th e pip elin e. When th e p ressure go es up to th e upper limit pressure, the valve will close entrance of the air compressor, then the compressor is in idle state. In this case, the compressor is still driven in operation by the motor, but it does not export compressive air, so the air pressure will not go up further. When the pressure goes down to the lower limit, the valve will be open again, and then the compressor exports compressive air and the air pressure will be up again. The variable air pressure is same as that of the first method. In this case, motor is running continuously, which can be used for high powe r motor. In locomotive serve plant, the second method is widely used for control the air pressure from air compressor be- cause of high power motor being used, which rating power is about 100KW. Although the motor is in running operation, its starting up should be controlled. Tradition- ally, there are two ways to fulfill the starting up, which are linking series resistor in the rotor loop and converting Y-connection of the starter loop [1]. However, there △ are still some disadvantages in these two ways as follows. 1) The air pressure in pipeline fluctuates greatly be- tween the upper and lower limits. 2) The con tinual upload and d ownload of air comp res- sor causes voltage fl uct uati o n in electrical power supply. Figure 1. Variable air pressure in pipeline 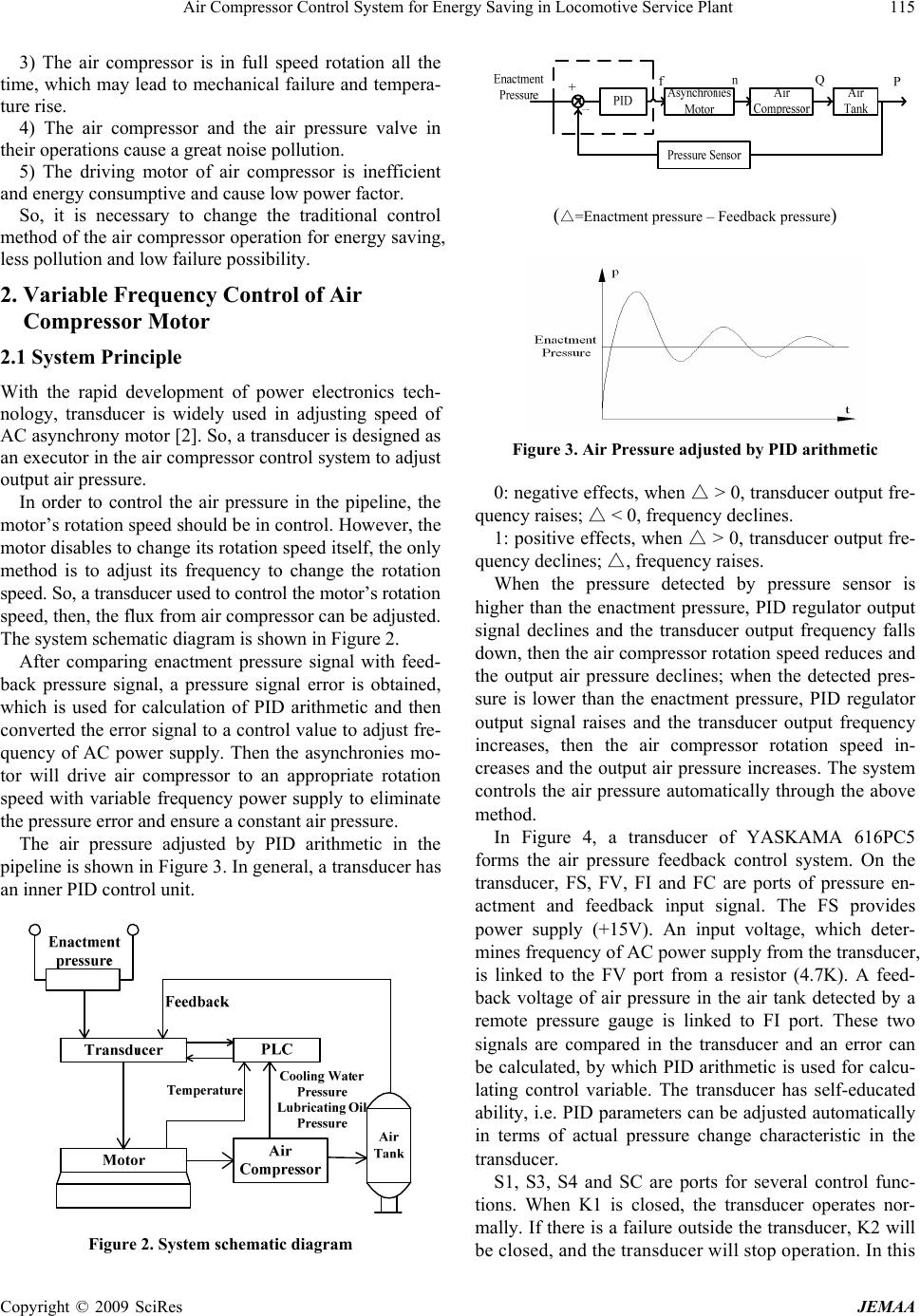 Air Compressor Control System for Energy Saving in Locomotive Service Plant 115 Copyright © 2009 SciRes JEMAA 3) The air compressor is in full speed rotation all the time, which may lead to mechanical failure and tempera- ture rise. 4) The air compressor and the air pressure valve in their operations cause a great noise pollution. 5) The driving motor of air compressor is inefficient and energy consumptive and cause low power factor. So, it is necessary to change the traditional control method of the air compressor operation for energy saving, less pollution and low failure possibility. 2. Variable Frequency Control of Air Compressor Motor 2.1 System Principle With the rapid development of power electronics tech- nology, transducer is widely used in adjusting speed of AC asynchrony moto r [2]. So, a tran sducer is design ed as an executor in the air compressor control system to adjust output air pressure. In order to control the air pressure in the pipeline, the motor’s rotation speed should be in control. However, the motor disables to change its ro tation speed itself, the only method is to adjust its frequency to change the rotation speed. So, a transducer used to control the motor’s rotat i o n speed, then, the flux from air compressor can be adjusted. The system schematic diagram is shown in Figure 2. After comparing enactment pressure signal with feed- back pressure signal, a pressure signal error is obtained, which is used for calculation of PID arithmetic and then converted the error signal to a control value to adju st fre- quency of AC power supply. Then the asynchronies mo- tor will drive air compressor to an appropriate rotation speed with variable frequency power supply to eliminate the pressure error and ensure a constant air pressure. The air pressure adjusted by PID arithmetic in the pipeline is shown in Figure 3. In general, a transducer has an inner PID control unit. Figure 2. System schematic diagram (=Enactment pressure △– Feedback pressure) Figure 3. Air Pressure adjusted by PID arithmetic 0: negative effects, when △ > 0, transducer output fre- quency raises; △ < 0, frequency declines. 1: positive effects, when △ > 0, transducer output fre- quency declines; , frequency raises.△ When the pressure detected by pressure sensor is higher than the enactment pressure, PID regulator output signal declines and the transducer output frequency falls down, then the air compressor rotation speed reduces and the output air pressure declines; when the detected pres- sure is lower than the enactment pressure, PID regulator output signal raises and the transducer output frequency increases, then the air compressor rotation speed in- creases and the output air pressure increases. The system controls the air pressure automatically through the above method. In Figure 4, a transducer of YASKAMA 616PC5 forms the air pressure feedback control system. On the transducer, FS, FV, FI and FC are ports of pressure en- actment and feedback input signal. The FS provides power supply (+15V). An input voltage, which deter- mines frequency o f AC power supply from the transducer, is linked to the FV port from a resistor (4.7K). A feed- back voltage of air pressure in the air tank detected by a remote pressure gauge is linked to FI port. These two signals are compared in the transducer and an error can be calculated, by which PID arithmetic is used for calcu- lating control variable. The transducer has self-educated ability, i.e. PID parameters can be adjusted automatically in terms of actual pressure change characteristic in the transducer. S1, S3, S4 and SC are ports for several control func- tions. When K1 is closed, the transducer operates nor- mally. If there is a failure outside the transducer, K2 will be closed, and the transducer will stop operation. In this 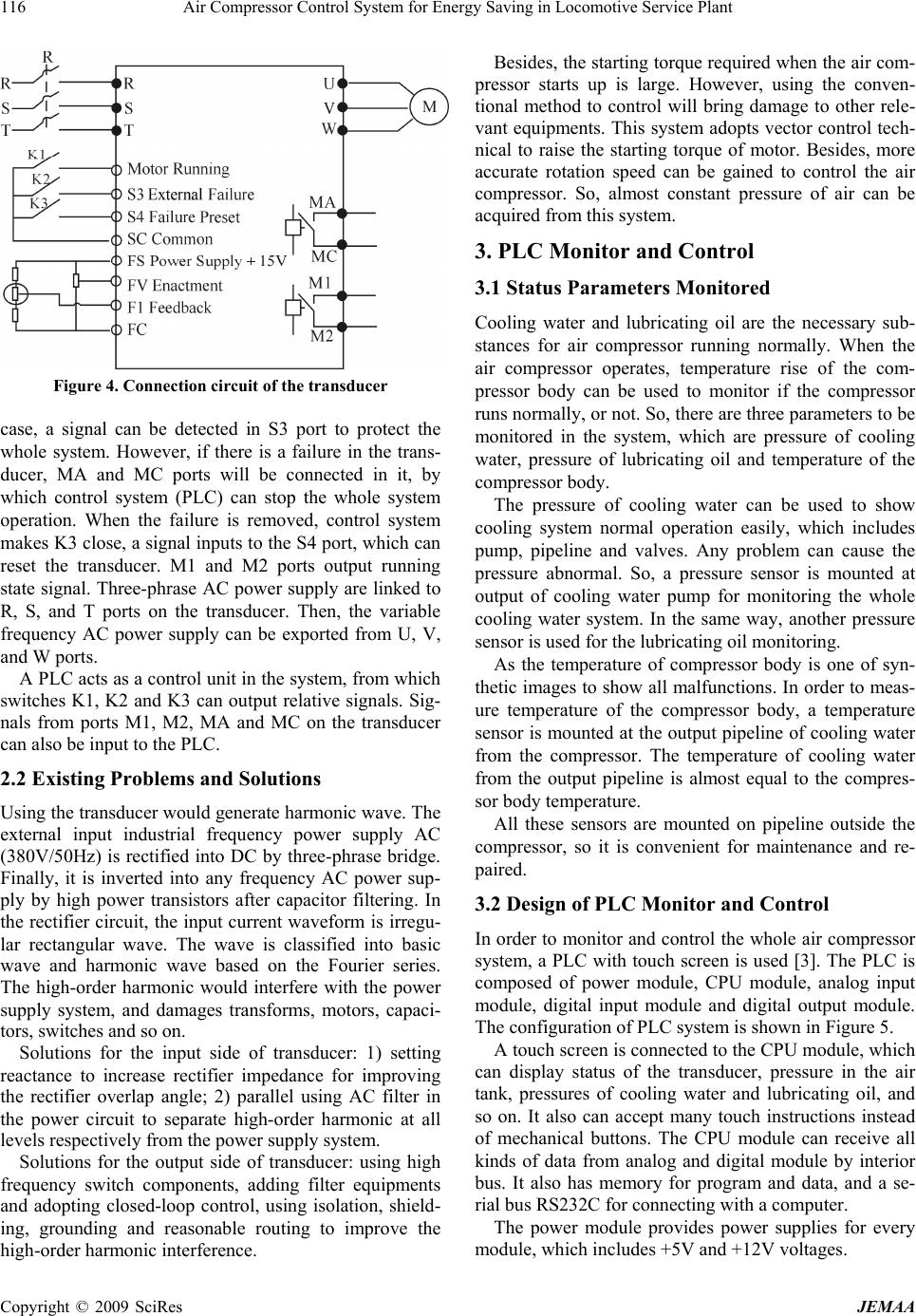 116 Air Compressor Control System for Energy Saving in Locomotive Service Plant Figure 4. Connection circuit of the transducer case, a signal can be detected in S3 port to protect the whole system. However, if there is a failure in the trans- ducer, MA and MC ports will be connected in it, by which control system (PLC) can stop the whole system operation. When the failure is removed, control system makes K3 close, a signal inputs to the S4 port, which can reset the transducer. M1 and M2 ports output running state signal. Three-phrase AC power supply are linked to R, S, and T ports on the transducer. Then, the variable frequency AC power supply can be exported from U, V, and W ports. A PLC acts as a control unit in the system, from which switches K1, K2 and K3 can output relative signals. Sig- nals from ports M1, M2, MA and MC on the transducer can also be input to the PLC. 2.2 Existing Problems and Solutions Using the transducer would generate harmonic wave. The external input industrial frequency power supply AC (380V/50Hz) is rectified into DC by three-phrase bridge. Finally, it is inverted into any frequency AC power sup- ply by high power transistors after capacitor filtering. In the rectifier circuit, the input current waveform is irregu- lar rectangular wave. The wave is classified into basic wave and harmonic wave based on the Fourier series. The high-order harmonic would interfere with the power supply system, and damages transforms, motors, capaci- tors, switches and so on. Solutions for the input side of transducer: 1) setting reactance to increase rectifier impedance for improving the rectifier overlap angle; 2) parallel using AC filter in the power circuit to separate high-order harmonic at all levels respectively from the power supply system. Solutions for the output side of transducer: using high frequency switch components, adding filter equipments and adopting closed-loop control, using isolation, shield- ing, grounding and reasonable routing to improve the high-order harmonic interfere nce. Besides, the starting torque required when the air com- pressor starts up is large. However, using the conven- tional method to control will bring damage to other rele- vant equipments. This system adopts vector control tech- nical to raise the starting torque of motor. Besides, more accurate rotation speed can be gained to control the air compressor. So, almost constant pressure of air can be acquired from this system. 3. PLC Monitor and Control 3.1 Status Parameters Monitored Cooling water and lubricating oil are the necessary sub- stances for air compressor running normally. When the air compressor operates, temperature rise of the com- pressor body can be used to monitor if the compressor runs normally, or not. So, there are three parameters to be monitored in the system, which are pressure of cooling water, pressure of lubricating oil and temperature of the compressor bo dy. The pressure of cooling water can be used to show cooling system normal operation easily, which includes pump, pipeline and valves. Any problem can cause the pressure abnormal. So, a pressure sensor is mounted at output of cooling water pump for monitoring the whole cooling water system. In the same way, another pressure sensor is used for the lubricating oil monitoring. As the temperature of compressor body is one of syn- thetic images to show all malfunctions . In order to meas- ure temperature of the compressor body, a temperature sensor is mounted at the output pipeline of cooling water from the compressor. The temperature of cooling water from the output pipeline is almost equal to the compres- sor body temperatur e. All these sensors are mounted on pipeline outside the compressor, so it is convenient for maintenance and re- paired. 3.2 Design of PLC Monitor and Control In order to monitor and control the whole air compressor system, a PLC with touch screen is used [3]. The PLC is composed of power module, CPU module, analog input module, digital input module and digital output module. The configuration of PLC system is shown in Figure 5. A touch screen is connected to the CPU module, which can display status of the transducer, pressure in the air tank, pressures of cooling water and lubricating oil, and so on. It also can accept many touch instructions instead of mechanical buttons. The CPU module can receive all kinds of data from analog and digital module by interior bus. It also has memory for program and data, and a se- rial bus RS232C for connecting with a compu ter. The power module provides power supplies for every module, which includes +5V and +12V voltages. Copyright © 2009 SciRes JEMAA 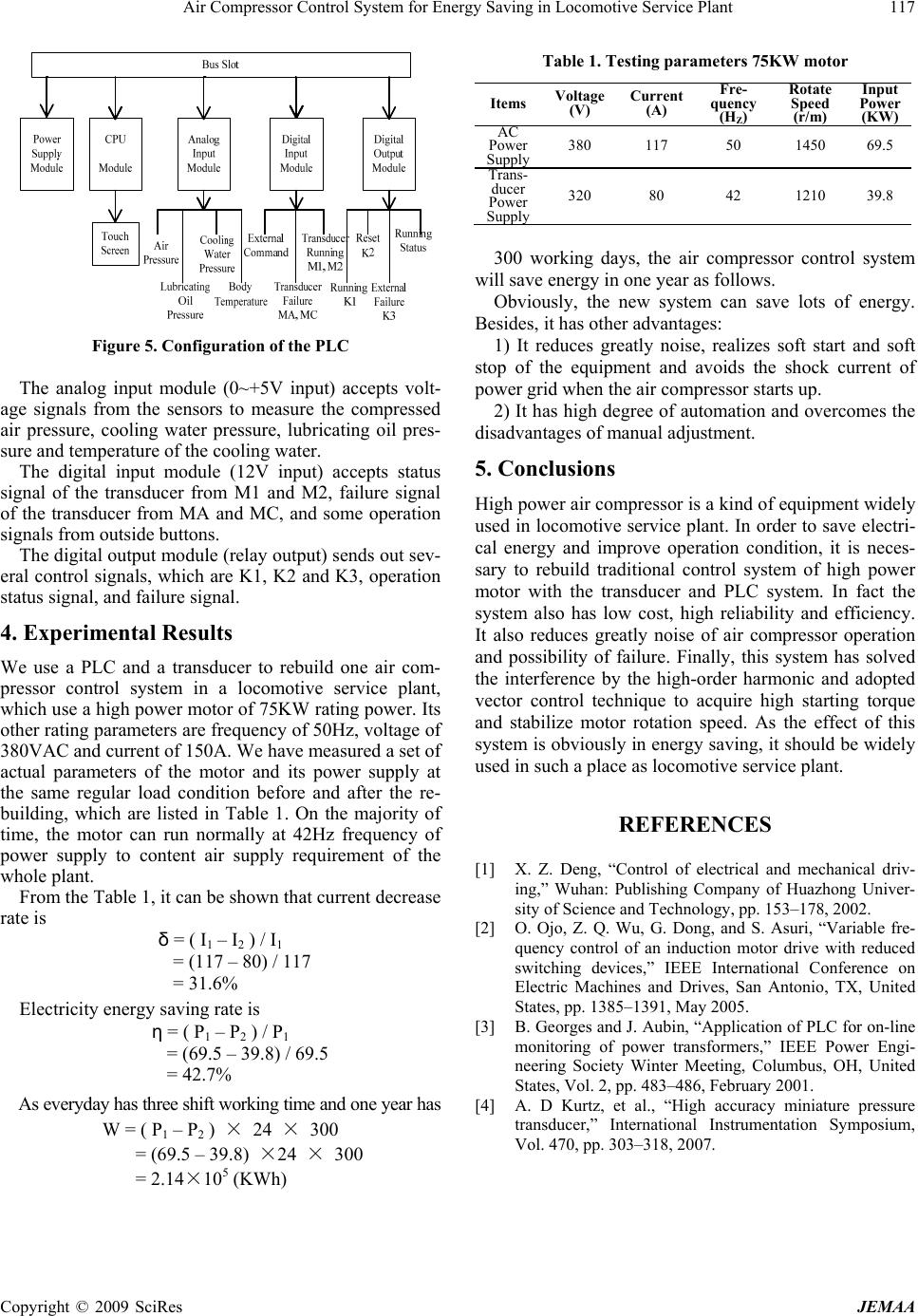 Air Compressor Control System for Energy Saving in Locomotive Service Plant 117 Copyright © 2009 SciRes JEMAA Table 1. Testing parameters 75KW motor Items Voltage (V) Current (A) Fre- quency (HZ) Rotate Speed (r/m) Input Power (KW) AC Power Supply 380 117 50 1450 69.5 Trans- ducer Power Supply 320 80 42 1210 39.8 300 working days, the air compressor control system will save energy in one year as fo llows. Obviously, the new system can save lots of energy. Besides, it has ot her advantag e s: 1) It reduces greatly noise, realizes soft start and soft stop of the equipment and avoids the shock current of power grid when the air compressor starts up. Figure 5. Configuration of the PLC The analog input module (0~+5V input) accepts volt- age signals from the sensors to measure the compressed air pressure, cooling water pressure, lubricating oil pres- sure and temperature of the cooling water. 2) It has high degree of automation and overcomes the disadvantages of manual adjustment. 5. Conclusions The digital input module (12V input) accepts status signal of the transducer from M1 and M2, failure signal of the transducer from MA and MC, and some operation signals from outside buttons . High power air compressor is a kind of equipment widely used in locomotive serv ice plant. In order to save electri- cal energy and improve operation condition, it is neces- sary to rebuild traditional control system of high power motor with the transducer and PLC system. In fact the system also has low cost, high reliability and efficiency. It also reduces greatly noise of air compressor operation and possibility of failure. Finally, this system has solved the interference by the high-order harmonic and adopted vector control technique to acquire high starting torque and stabilize motor rotation speed. As the effect of this system is obviously in energy saving, it should be widely used in such a place as locomotive service plant. The digital output module (relay output) sends out sev- eral control signals, which are K1, K2 and K3, operation status signal, and failure signal. 4. Experimental Results We use a PLC and a transducer to rebuild one air com- pressor control system in a locomotive service plant, which use a high power motor of 75KW rating power. Its other rating parameters are frequency of 50Hz, voltage of 380VAC and current of 150A. We have measured a set of actual parameters of the motor and its power supply at the same regular load condition before and after the re- building, which are listed in Table 1. On the majority of time, the motor can run normally at 42Hz frequency of power supply to content air supply requirement of the whole plant. REFERENCES [1] X. Z. Deng, “Control of electrical and mechanical driv- ing,” Wuhan: Publishing Company of Huazhong Univer- sity of Science and Technology, pp. 153–178, 2002. From the Table 1, it can be shown that current decrease rate is [2] O. Ojo, Z. Q. Wu, G. Dong, and S. Asuri, “Variable fre- quency control of an induction motor drive with reduced switching devices,” IEEE International Conference on Electric Machines and Drives, San Antonio, TX, United States, pp. 1385–1391, May 2005. δ = ( I1 – I2 ) / I1 = (117 – 80) / 117 = 31.6% Electricity energy saving rate is [3] B. Georges an d J. Aubin, “Application of PLC for on-line monitoring of power transformers,” IEEE Power Engi- neering Society Winter Meeting, Columbus, OH, United States, Vol. 2, pp. 483–486, February 2001. η = ( P1 – P2 ) / P1 = (69.5 – 39.8) / 69.5 = 42.7% As everyday has three shift working time and one year has [4] A. D Kurtz, et al., “High accuracy miniature pressure transducer,” International Instrumentation Symposium, Vol. 470, pp. 303–318, 2007. W = ( P1 – P2 ) × 24 × 300 = (69.5 – 39.8) ×24 × 300 = 2.14×105 (KWh) |