J. Electromagnetic Analysis & Applications, 2009, 2: 85-91
doi:10.4236/jemaa.2009.12013 Published Online June 2009 (www.SciRP.org/journal/jemaa)
Copyright © 2009 SciRes JEMAA
1
Distance Measure Based Rules for Voltage
Regulation with Loss Reduction
Y. Rosales Hernandez, T. Hiyama
Department of Computer Science and Electrical Engineering, Kumamoto University, Kumamoto, Japan.
Email: yoelcuba@st.eecs.kumamoto-u.ac.jp, hiyama@cs.kumamoto-u.ac.jp
Received March 19th, 2009; revised May 25th, 2009; accepted May 28th, 2009.
ABSTRACT
This paper presents a rule-based technique to control the voltage in a power transmission network. Transformers with a
tap changer installed in the system are selected by the proposed technique as control devices. For each bus under volt-
age violation, the most effective control device is selected by using the minimum electric distance criteria. In order to
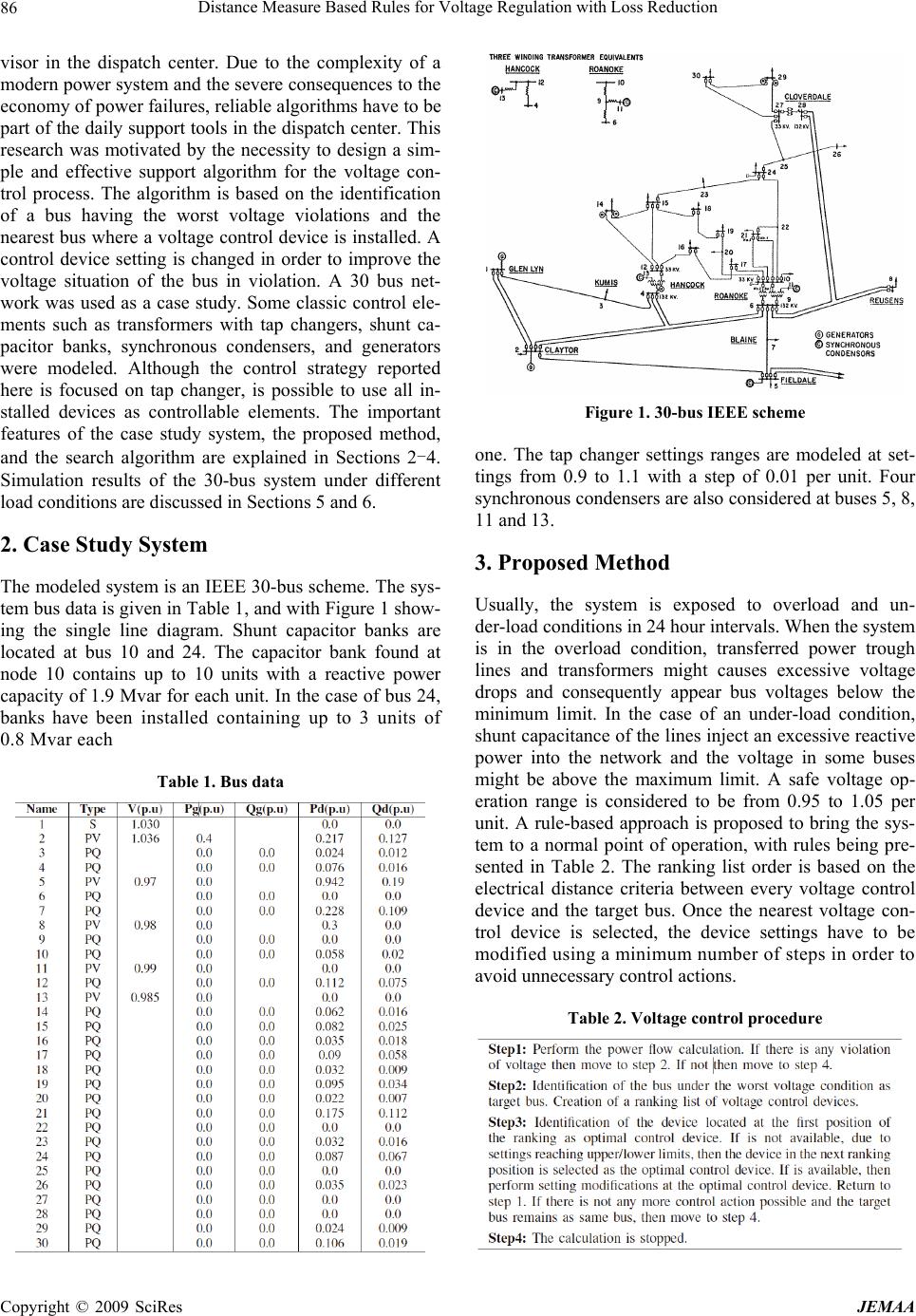
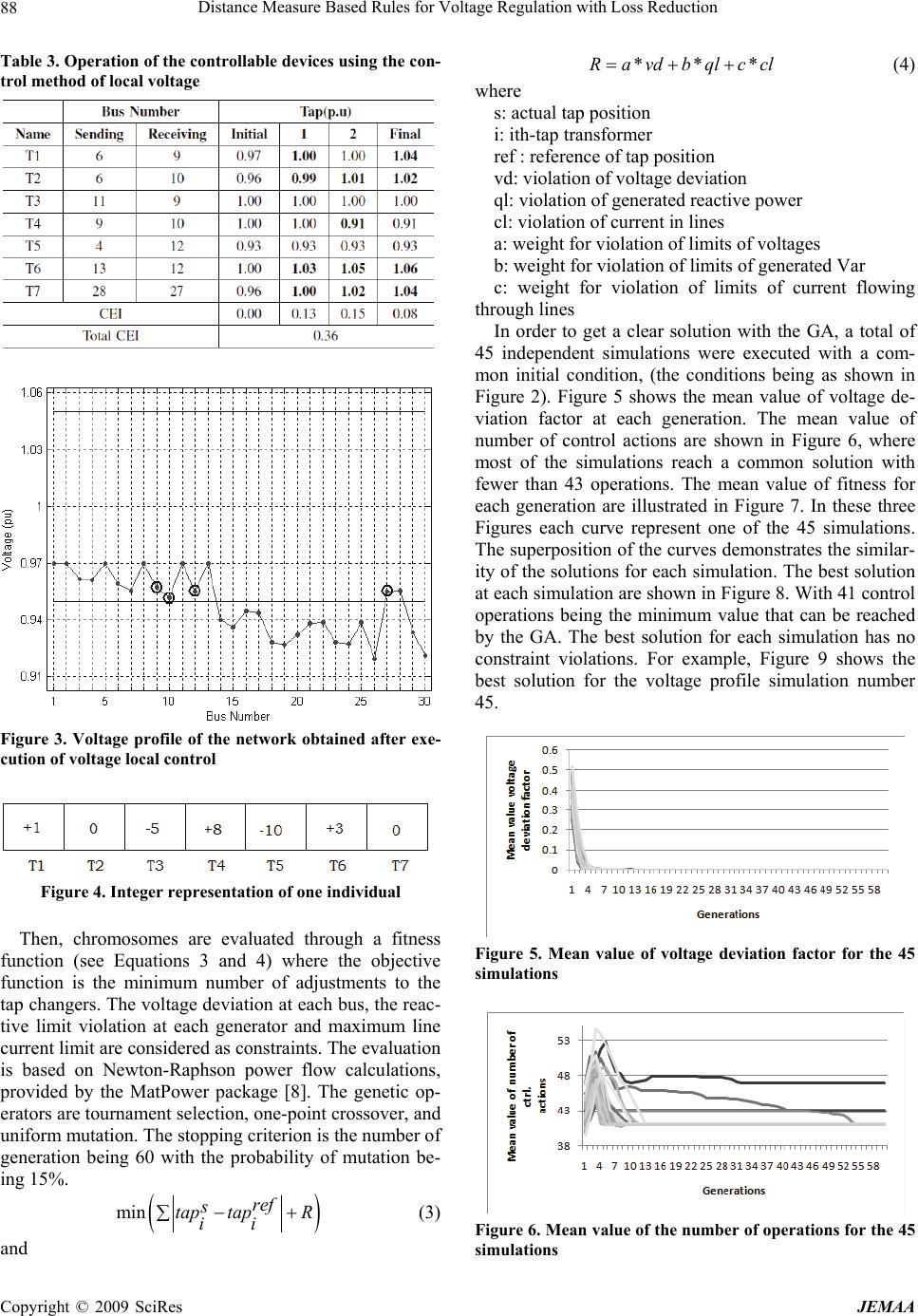
demonstrate the efficiency of the method, several simulations were performed using an IEEE 30-bus network as a model
system. The distance measure technique is compared with classic voltage regulation approach and a genetic algorithm
based. The results obtained show the robustness of the proposed method.
Keywords: Knowledge Based Systems, Losses, Voltage Control
1. Introduction
Current approaches to the operation of a modern distribu-
tion network demand high operational performance of the
system and consequently require highly effective control
strategies. Although voltage deviation control is one of
the problems that has been extensively investigated, it
still remains as an important topic to deal with. Voltage
control algorithms may be classified into two categories:
rule-based and network model-based. Rule-based algo-
rithms use rules that control switched capacitors and
transformer tap changers based on real-time measure-
ments and past experience. Network model-based sys-
tems use network topology, impedance, real-time meas-
urements and statistical information to establish the cur-
rent state of the system. It then applies optimization tech-
niques to get the best possible solution. Within the net-
work models-based systems there are many different ap-
proaches. A simulated annealing technique for global
optimal solution is presented in [1]. The authors propose
a knowledge-based expert system which detects buses
with maximum voltage deviations and operates the near-
est available transformer control unit to correct the prob-
lem. Then, a simulated annealing algorithm is utilized to
solve the problem of capacitors manipulation. The paper
shows a very good result in terms of power loss reduc-
tions but does not guarantee an economical use of trans-
formers operations. Restriction in the number of switch-
ing operation is the focus in [2]. Here, dynamic pro-
gramming and fuzzy logic algorithms are combined to
control voltages and reduce power losses. The problem is
decomposed into two sub-problems: first, the control of
the load tap changers (LTC) and capacitor banks at sub-
station level and second, the control of the capacitor
banks installed at the feeder level. Dynamic program-
ming is used in sub-problem 1 and fuzzy logic is adopted
for the second sub-problem. Simulation results show the
excellent performance of the proposed approach. The use
of genetic algorithms is another approach to the control
of voltage and reactive power in the system. The ap-
proach in [3] combines the benefits of a linearized system
model and genetic algorithms (GA). Whenever a voltage
correction is demanded, an initial calculation of the sen-
sitivity matrix is done in order to identify an initial popu-
lation for the GA. Then the GA finds a proper set of con-
trol actions to execute. The method offers good solutions
to the voltage/reactive power problem and also reduces
the number of control actions. Authors in [4] use a
method based on an artificial neural network to find the
suitable capacitor switching regime for every load state.
The main objective is to reduce power losses and the only
constraint considered is bus voltage. The advantage of
this method is the short calculation time. However, in real
applications, it might be difficult to use because the sys-
tem requires training sessions every time any small
change is made to the network topology.
The approach presented in this paper is rule-based and
is a new decision-making tool for centralized control of
voltage. When the system lacks automatic function con-
trol the task has to be performed manually by the super-