Paper Menu >>
Journal Menu >>
 J. Biomedical Science and Engineering, 2011, 4, 320-340 JBiSE doi:10.4236/jbise.2011.44042 Published Online April 2011 (http://www.SciRP.org/journal/jbise/). Published Online April 2011 in SciRes. http://www.scirp.org/journal/JBiSE Theoretical modeling of airways pressure waveform for dual-controlled ventilation with physiological pattern and linear respiratory mechanics Francesco Montecchia Laboratorio Sperimentale Policentrico di Ingegneria Medica, Dipartimento di Ingegneria Civile, Università degli Studi di Roma “Tor Vergata”, Rome, Italy. Email:francesco.montecchia@uniroma2.it Received 13 January 2011; revised 28 March 2011; accepted 7 April 2011. ABSTRACT The present paper describes the theoretical treat- ment performed for the geometrical opt imization of advanced and improved-shape waveforms as air- ways pressure excitation for controlled breathings in dual-controlled ventilation applied to anaesthe- tized or severe brain injured patients, the respira- tory mechanics of which can be assumed linear. Advanced means insensitive to patient breathing activity as well as to ventilator settings while im- proved-shape intends in comparison to conventional square waveform for a progressive approaching to- wards physiological transpulmonary pressure and respiratory airflow waveforms. Such functional fea- tures along with the best ventilation control for the specific therapeutic requirements of each patient can be achieved through the implementation of both diagnostic and compensation procedures ef- fectively carried out by the Advance Lung Ventila- tion System (ALVS) already successfully tested for square waveform as airways pressure excitation. Triangular and trapezoidal waveforms have been considered as airways pressure excitation. The re- sults shows that the latter fits completely the re- quirements for a physiological pattern of endoal- veolar pressure and respiratory airflow waveforms, while the former exhibits a lower physiological be- haviour but it is anyhow periodically recommended for performing adequately the powerful diagnostic procedure. Keywords: Mathematical Modeling; Mechanical Ventilation; Controlled Breathing; Pressure and Airflow Waveforms; Respiratory Mechanics; Tidal and Minute Vo l um e s 1. INTRODUCTION The clinical applications of assisted/controlled ventila- tion are mainly devoted to patients treated with anaes- thesia or in Intensive Care Units or affected by the res- piratory insufficient syndrome [1-3]. When spontaneous breathing of such patients is absent or forbidden for the entire time of treatment, controlled ventilation is required. The respiratory pattern during controlled ventilation shows only controlled breathings, i.e. breathings for which the control of lung ventilation is completely carried out by an external ventilator, in series with time [4,5]. Otherwise, when spontaneous breathing is present, even if partially in time or below the standard physio- logical level, assisted/controlled ventilation is recom- mended. Allowing the patient the possibility of sponta- neous breathing at his will or capability, assisted/ con- trolled ventilation is so called because, it includes all that modalities or techniques in which the ventilator supplies the patient with controlled breathing only after a long lasting interval of apnea (assisted ventilation) or at de- tection of a very weak effort of spontaneous breathing (triggered ventilation). The respiratory pattern during assisted/controlled ventilation shows both controlled and spontaneous breathings in random series with time [6-7]. The controlled breathings supplied to patient during controlled or assisted/controlled ventilation can be prop- erly classified considering the primary physical parame- ters controlled during the inspiration by the ventilator irrespective of load (respiratory characteristics of patient) variations or fluctuations as well as ventilator settings [8, 9]. Volume-controlled ventilation (VCV) or pressure- controlled ventilation (PCV) refer to different modalities in which during the inspiration the ventilator supplies the load (lungs) with the pre-established volume (tidal or  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 321 minute volume) through the selected respiratory airflow waveform or applies to the load the pre-established air- ways pressure waveform, respectively [8,9]. The historical background of both VCV and PCV as well as their advantages and disadvantages in different clinical applications of assisted/controlled ventilation have been extensively described elsewhere [9,10]. In summary, considering the higher physiological character along with lower level of intrinsic pathological risks and functional failure involved, nowadays PCV is certainly the most adopted in the clinical practice [9-12]. The functional disadvantages of PCV which does not provide for the control of lung volume (tidal or minute) has been overcome with the implementation of dual- controlled ventilation (DCV), i.e. PCV with ensured tidal or minute volume [13,14]. In detail, DCV is an ad- vanced form of PCV in which the magnitude of selected airways pressure waveform is automatically regulated by feedback control for delivering during the inspiration time either the tidal volume required or, considering the current breathing frequency, the minute volume pre- established [9,15]. This is the so called DCV “breath to breath” mode, representing the most diffused form of DCV in the clinical practice [15,16]. In a different way, the so called DCV “within a breath” mode is a DCV mode in which the ventilator switches from pressure to volume control in the middle of the breath [15,16]. In most cases during assisted/controlled ventilation, the respiratory system of healthy anaesthetized or severe brain injured patients exhibits a steady and reproducible response to controlled breathings, if evaluated as a whole. Moreover, the breathing dynamics involved is consid- erably reduced on account of small tidal volume required. Therefore, the respiratory mechanics of such patients can be properly assumed steady and linear [9]. According to PCV excitation hypothesis along with to steady and lin- ear respiratory mechanics assumption, only DCV “breath to breath” mode will be considered in the present work. Moreover, DCV “breath to breath” mode is per- fectly compatible with the feedback control adopted for the ventilation process [9] which regulates the operative parameters only between different breathings evaluated as a whole, i.e. in steady conditions and does not within the transient time of each breath [9,15,16]. Until today, PCV or DCV have been mainly imple- mented with square waveform as airways pressure exci- tation, i.e. two different constant levels of airways pres- sure applied to patient during both inspiration and expi- ration [12,14,16]. Such strong limitation in waveform modeling of airways pressure controlled by the ventilator, resulting from simplified hardware and software design, reduces drastically the functional versatility of the venti- lator performances. Among the different systems proposed for removing this limitation [8,9,17-28] and thus for evaluating the effect of varying inspiratory airflow waveforms on cli- nical parameters of mechanically ventilated patients [29- 31], the Advanced Lung Ventilation System (ALVS) has been conceived and designed for the waveform optimi- zation of airways pressure excitation when controlled breathings have to be apply during assisted/ controlled ventilation to anaesthetized or severe brain injured pa- tients, the respiratory mechanics of which can be as- sumed steady and linear [9,32-36]. The functional flexi- bility and versatility of ALVS are both extremely useful for the research activity with an optimal and advanced ventilator as well as for its laboratory and clinical de- velopment and testing [9]. The present work deals with the description of both theory and ALVS settings performed for modeling a more realistic approximation of airways pressure excita- tion to physiological transpulmonary pressure waveform. The optimization of such excitation for patient, i.e. air- ways pressure waveform, has been carried out in order to reach a more physiological reaction of patient, i.e. respi- ratory airflow and endoalveolar pressure waveforms. 2. METHODS The optimization of controlled breathing during assisted/ controlled ventilation obtained by the functional features of ALVS, has been extensively reported and discussed elsewhere [9]. Concerning the controlled breathings ap- plied to patient during assisted/controlled ventilation, in order to improve over the conventional PCV with en- sured tidal or minute volume, i.e. dual-controlled venti- lation (DCV), ALVS has been designed for performing two subsequent functional steps. The first step consists in the optimization of the venti- lation control with conventional square waveform as airways pressure excitation applied to patient. This result has been already reached by means of two effective functional procedures: The diagnostic and the compen- sation procedures. The theoretic approach on which the optimization of the ventilation control as well as both the diagnostic and the compensation procedures found, have been exten- sively reported in a previous paper [9] in which the res- piratory mechanics of considered patients, i.e. anaesthe- tized or severe brain injured patients, has been properly assumed linear. Moreover, the ventilation control works by feedback regulation acting after the acquisition of each controlled breathing accounted as a whole, i.e. in steady conditions. The diagnostic procedure establishes the optimal time of both inspiration and expiration taking into account the  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 322 current respiratory characteristics (airways resistance and lung compliance) of patient and his diagnostic eva- luations. Practically, the procedure sets the time of both inspiration and expiration as about five times the current inspiratory and expiratory time constants, the determina- tion of which, along with other useful diagnostic pa- rameter, is obtained real-time by ALVS monitoring sys- tem [37-39]. The determination of both airways resis- tance and lung compliance of patient is currently per- formed by the diagnostic procedure with high accuracy and without any unfavourable deformation of respiratory pattern otherwise introduced with the required artificial respiratory airflow interruption [40,41]. The high accu- racy results from the application of the compensation procedure, described as follows, since it allows the cor- rect implementation of the results available from the theory developed assuming a real square waveform as airways pressure excitation [9,42-44]. The compensation procedure stabilizes the airflow across the external resistance which controls the airways pressure applied to patient during the whole respiratory time. The procedure is performed through the variation during both inspiration and expiration of ALVS genera- tor’s internal resistance around its steady equilibrium value assumed during apnea, according to the respiratory airflow waveform resulting from patient's breathing ac- tivity and characteristics. The determination of the res- piratory airflow waveform is obtained real-time by AL- VS monitoring system. In such a way, ALVS behaves like an ideal airways pressure generator, making possible a real square waveform as airways pressure excitation through a proper square waveform as external resistance of ALVS controlling the airways pressure applied to pa- tient, eliminating the airways pressure distortion induced by the dependence on current value of load (airways resistance and lung compliance) and its variations. The experimental results obtained by ALVS connected with a well suited and versatile lung simulator perform- ing the implementation of both diagnostic and compen- sation procedure for advanced square waveform as air- ways pressure excitation are completely in agreement with the theoretical ones, showing clearly that the venti- lation control optimization has been reached. In particu- lar, concerning the lung volume control, the results point out that the tidal or minute volume are independent on airways resistance or lung compliance, respectively [9]. The last results are very interesting from both clinical and engineering point of view since an increase of air- ways resistance (obstructive process) or a reduction of lung compliance (restrictive process) does not affect the control of tidal or minute volume, respectively, avoiding a critical regulation of the airways pressure levels ap- plied to patient. The second step consists in the optimization of the ventilation control with waveforms of improved shapes as airways pressure excitation applied to patients con- sidering their current clinical conditions and specific the- rapeutic requirements. Improved shapes means more realistic approximation of airways pressure waveform to physiological transpulmonary pressure waveform indu- cing a more physiological reaction of patient, i.e. respi- ratory airflow and endoalveolar pressure waveforms. The implementation of the diagnostic procedure in these cases also ensures that the optimal time of both inspiration and expiration is retained taking anyhow into account the current respiratory characteristic of patient (airways resistance and lung compliance) and his diag- nostic evaluations. Moreover, the implementation of the compensation procedure in these cases also, making the selected airways pressure waveform insensitive to pa- tient’s respiratory characteristics, allows any airways pressure waveform of clinical interest during both inspi- ration and expiration through an identical shape of ex- ternal resistance waveform which controls the airways pressure applied to patient. In the present work, from a theoretical point of view, two waveforms of increasing geometrical shape with respect to conventional square waveform have been con- sidered as airways pressure excitation applied to patient: triangular and trapezoidal. Accordingly to the physiopa- thological and clinical condition of patients considered as well as to the physical characteristics of controlled breathings in assisted/controlled ventilation modalities, the theoretical treatment in both cases has been carried out evaluating each controlled breathing as a whole, i.e. in steady conditions and assuming linear the respiratory mechanics of patients [9,32-36]. 3. RESULTS 3.1. Advanced Square Waveform as Airways Pressure Excitation (AD_SQUARE) Figure 1 shows the airways (pAW(t)) and endoalveolar (pEA(t)) pressures (p(t)) as well as the respiratory airflow ( RES(t)) as a function of time (t) resulting from the ap- plication to patient of the advanced square waveform as airways pressure excitation (AD_SQUARE). The time, the variables and the parameters relative to inspiration and expiration will be denoted with the addition of a specific pedix character (i) and (e), respectively. As de- picted in Figure 1(b), on account of their opposite direc- tions, the inspiratory ( INS(ti)) and expiratory ( EXP(te)) airflows are conventionally considered positive and negative quantities, respectively. The most relevant results obtained in the previous work [9] are summed up as follows. The real time  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 323 Figure 1. (a) Airways (pAW(t)) and endoalveolar (pEA(t)) pres- sures (p(t)) along with (b) respiratory airflow ( RES(t)) as a function of time (t) resulting from the application of AD_ SQUARE. In (b) inspiratory ( INS(ti)) and expiratory ( EXP(te)) airflows are depicted as positive and negative quantities, re- spectively, on account of their opposite directions. monitoring of both INS(ti) and EXP(te) provides for the determination of the following parameters: tTI; tTE; INS(0); EXP(0). INS(0) and EXP(0) are the initial maxi- mum values assumed by INS and EXP, respectively, while tTI and tTE are the times required for reaching the end of transient inspiration and expiration times, i.e. for observing a ninety nine percent (99%) reduction of INS and EXP with regard to INS(0) and EXP(0), respectively. If the upper (PI) and lower or external positive end expiratory pressure (PEEPEXT) constant levels of square waveform as pAW excitation are kept for an inspiration (TI) and expiration (TE) times equals to tTI and tTE, re- spectively, the following expressions occur: 55 TIINSINS P TItR C (1) 55 TEEXPEXP P TE tRC (2) p PEA t Cpt (3) e i I NS t EAi iEXT ptPIPI PEEP (4) e e E XP t EAe eEXTEXT ptPEEPPI PEEP (5) EAi AWi pTIPAPpTIPI (6) E AeTOT AWeEXT pTE PEEPpTE PEEP (7) 0 E Ai EAeEXT ppTE PEEP (8) I NS and E XP are the inspiratory and expiratory time constants, respectively, while Pt is the lung volume as a function of time. According to the assumption of linear respiratory mechanics for controlled breathings accounted as a whole, i.e. in steady conditions [9], the static lung compliance (CP), defined by (3), can be considered as constant during the whole respiration time, while the different values assumed by the respiratory airways resistance (RRES) during inspiration (RINS) and expira- tion (REXP) can be both considered constant. According to (6) and (7), the maximum or peak (PAP) and minimum or total positive end expiratory pressure (PEEPTOT) values of pEA assumed at the end of inspiration (ti = TI) and expiration (te = TE), respec- tively, can be easily detected since they equal the con- stant PI and PEEPEXT values assumed by pAW during the inspiration (0 ≤ ti ≤ TI) and the expiration (0 ≤ te ≤ TE), respectively. (8) establishes that the value as- sumed by pEA at the beginning of inspiration (pEAi(0)) should be equal to that assumed at the end of last ex- piration (pEAe(TE)). Concerning with vP, considering (3), (6) and (8) at the beginning (ti = 0) and end (ti = TI) of inspiration, the following expressions result: 00 pip EAipEXT vCpC PEEPFRC (9) pip EAip vTI Cp TI CPI (10) 0 TID pipipEXT VvTIvC PIPEEP (11) FRC and VTID denote the functional residual capacity and the tidal volume delivered to patient for every inspira- tion. If TI and TE are expressed in seconds, considering that the breathing period (TR) equals to the sum TI + TE, from both (1) and (2), the breathing frequency (FR), expressed in act for minutes, is defined as follows: 60 6060 5 P INS EXP FR TRTI TEC RR (12) Considering both (11) and (12), the so-called minute volume (VMIN), i.e. the volume delivered to patient for every minute, is given by the following expression: 12 E XT MINTID INS EXP PI PEEP VFRV RR (13) As pointed out in § 2, (11) and (13) establish that VTID or VMIN are independent on RRES (both RINS and REXP) or CP, respectively. That is extremely relevant from both clinical and engineering point of view since an increase  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 324 of RRES (obstructive process) or a reduction of CP (re- strictive process) does not affect the control of VTID or VMIN, respectively, avoiding a critical regulation of pAW constant levels applied to patient. As it is well known, the mean value (M) of a periodic function of time (t) with period T (fT(t)) is defined as follows: 0 1d T T M ftt T (14) If pAW(t) and pEA(t) are considered as periodic functions of time with period TR, the mean pAW(t) (MAP) and pEA(t) (MEP) assume the following expressions: 0 1d TR AW M APptt TR (15) 0 1d TR EA M EPpt t TR (16) From Figure 1(a), (1), (2), (4), (5), (12), (15) and (16), it is easy to demonstrate that MAP and MEP values of AD_SQUARE (MAPsqu and MEPsqu) result as follows: E XT INS squ EXTINS EXP PI PEEP MAP PEEP (17) 0,80, 2 E XT INSEXP squ EXTINS EXP PI PEEP MEP PEEP (18) 3.2. Advanced Improved-Shape Waveforms as Airways Pressure Excitation The favourable results obtained with the implementation of AD_SQUARE in term of ventilation control optimi- zation (§ 3.1), suggest theoretical effort for considering advanced and improved-shape waveforms as pAW excita- tion applied to patient. Advanced means insensitive to patient breathing activity as well as to ventilator settings. Improved-shape intends in comparison to conventional square waveform for a progressive approaching to phy- siological transpulmonary pressure waveform producing a more suitable reaction of patient, i.e. a more realistic approximation of RES and pEA waveforms to physio- logical ones. For this reason, moving from AD_SQUARE, two waveforms of different geometrical shape which pro- gressively approach the best solution are going to be considered: Triangular and trapezoidal. The problem to be solved consists in the proper smoothing of RES verti- cal discontinuities occurring at the beginning of both inspiration and expiration when RES is reversed, as re- sponse to upward and downward pAW vertical transitions characteristic of square waveform. So that, the elimina- tion of such pAW vertical transitions is the most relevant change to be applied on AD_SQUARE. 3.3. Advanced Triangula r Waveform as Ai rways Pressure Excitation (AD_TRIANG) Figure 2 shows the advanced triangular waveform as pAW excitation (AD_TRIANG). Unlike AD_SQUARE, where pAW is kept constant during the whole time of in- spiration (0 ≤ ti ≤ TI), in AD_TRIANG pAW increases linearly from minimum or PEEPEXT to maximum or peak (PIP) values assumed at the beginning (ti = 0) and at the end (ti = TI) of the time during inspiration (ti), respec- tively. The linear increase of pAW has been selected for smoothing RES discontinuity occurring at the beginning of every inspiration as response to upward pAW vertical transition of AD_SQUARE. As in AD_SQUARE, during the whole time of expiration (0 ≤ te ≤ TE) pAW is kept constant on PEEPEXT value. AD_TRIANG can be carried out by connecting the patient’s airways with an ideal generator creating a tri- angular waveform of pAW. The electrical-equivalent cir- cuit of AD_TRIANG generator connected to the patient's airways is shown in Figure 3. The respiratory mechanics of patient (lung simulator) has been treated with a steady and linear physical model consisting of the respiratory airways resistance (RRES) connected in series to the lung compliance (CP) [9,45,46]. Such physical model does not include any inductance on account of negligible in- ertia of airflow as well as airways, lungs and chest tis- sues at very low breathing frequencies involved (10 - 12 act/min). 3.3.1. Inspiration Time The application of the second Kirchhoff’s law to the circuit of Figure 3 provides for the following equation: 0 AWi iINSINSiEAi i ptR tpt (19) AD_TRIANG (Figure 2) requires the following expres- sion of pAWi(ti): Figure 2. The advanced triangular waveform as airways pres- sure (pAW(t)) excitation (AD_TRIANG).  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 325 Figure 3. Electrical-equivalent circuit of AD_TRIANG gen- erator connected to the patient’s airways. 1AWiiEXTi i ptPEEPkt (20) where k1i is the slope of pAWi(ti) linear increase with time (ti). As it is well known, INS(ti) is defined as the time derivation of vPi(ti), as follows: d d P ii INS ii vt tt (21) Considering (3) as well as by inserting both (20) and (21) into (19), the following equation results: 1 d0 d Pi iPi i EXTi iINSiP vt vt PEEPk tRtC (22) In order to solve Eq.22, i.e. to find out the transient and steady expressions of vPi(ti), it is useful to transform it from time (ti) to Laplace (s) variable domains, as fol- lows: 1 200 Pi i EXT INS PiPiP vs k PEEP Rsvsv sC s (23) On account of both (1) and (9), the solution of (23) con- sists in the following expression: 21 21 i I NS INS Pi INS k FRC FRCss R vs ss (24) Eq.24 can be properly decomposed as follows: 21 Pi I NS A BC vs s ss (25) The unknown constants A, B and C can be determined by setting Eq.24 equal to Eq.25, resulting as follows: 1iP A kC (26) 11 P EXTi INSiP INS BCPEEPkFRCk C (27) 1iPINS CkC (28) Finally, by inserting (26), (27) and (28) into (25), the following expression results: 111 21 iPiPINS iPINS Pi I NS kCFRCkCkC vs s ss (29) According to the Inverse Laplace Transform of (29), the function vPi(ti) assumes the following expression: 11e i INS t Piii PiINS vt FRCkCt (30) The functions INS(ti) and pEAi(ti) can be determined considering (21) and (3), respectively, as follows: 11e i INS t INSii P tkC (31) 11e i INS t EAi iEXTiiINS ptPEEPk t (32) The functions vPi(ti), INS(ti) and pEAi(ti) are reported in Figure 4, Figure 5 and Figure 6, respectively. The difference between pAWi(ti) and pEAi(ti) (pi(ti)) can be determined from both (20) and (32), as follows (Figure 6): 11e i INS t ii iINS pt k (33) The same result of (33) could also be obtained by in- serting (31) into (19). Considering (30), (31) and (32) at the beginning of inspiration time (ti = 0), the following expressions result: 0 pi vFRC (34) 00 INS (35) 00 EAiEXT AWi pPEEP p (36) (34) and (36) fit well (9) and (8), respectively (Figure 4 and Figure 6), according to the same steady conditions occurring in AD_SQUARE at the beginning of inspira- tion time (ti = 0) and thus at the end of last expiration time (te = TE). If TI is set equal to the time required for reaching the  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 326 Figure 4. Lung volume (vP(t)) as a function of time (t) resulting from the application of AD_TRIANG. Figure 5. Respiratory airflow ( RES(t)) as a function of time (t) resulting from the application of AD_TRIANG. Figure 6 . Endoalveolar pressure (pEA(t)) as a function of time (t) resulting from the application of AD_TRIANG. steady condition, i. e. the end of transient inspiration time (tTI = 5 INS), (20), (30), (31), (32) and (33) provide for the following expressions: 1 55 AWiINSEXTiINS pTIPIP PEEPk (37) 5 1 1 551e 4 piINSi PINSINS iPINS vTI FRCkC FRCkC (38) 5 11 51e I NSINSi Pi P TI kCkC (39) 1 54 E AiINSEXTi INS pTIPAP PEEPk (40) 1 5 iINS iINS pTIPIP PAPk (41) (39) establishes that at the end of transient time (ti = TI = 5 INS), the increase of INS reaches a saturation value given by the product of CP with the linear slope (k1i) selected for pAW (Figure 5). This result is remarkable since INS(5 INS) being independent on RINS, provides for a more physiological INS waveform adapting itself to lung elastic characteristic (CP). Moreover, INS(5 INS) can be adequately adjusted by k1i regulation for a proper compensation of the actual CP value. According to our purpose, (35) establishes the real smoothing of RES discontinuity occurring at the begin- ning of every inspiration time (Figure 5). Unfortunately, unlike AD_SQUARE, according to (39), the final value of INS ( INS(5 INS)) is different from zero (Figure 5). Such problem will be soon after removed with AD_ TRAPEZ (§ 3.4). Both (33) and (41) establish that pi increases from zero to a saturation value (Figure 6) given by the prod- uct k1i INS reached at the end of transient time (ti = TI = 5 INS). Moreover, (32) establishes that during the tran- sient time (0 ≤ ti ≤ TI) the second time derivation of pEAi(ti) is positive, the time rate of pEAi(ti) increasing from 0 to k1i, that is the slope selected for pAWi(ti). The last results are equally remarkable if compared to those obtained with AD_SQUARE. Unlike AD_SQUARE, indeed, where pEAi(ti) waveform can be controlled only by selecting the maximum (PI) constant level of pAW (control of first order), in AD_TRIANG pEAi(ti) wave- form can be much safely controlled by selecting k1i value under of which the pEAi(ti) increasing rate with time is certainly kept (control of second order). Considering both (34) and (38), VTID for an inspiration time equal to TI (VTID(TI)), results as follows: 1 504 TIDpiINSpiiP INS VTIvTIvkC (42) From both (12) and (42), VMIN for an inspiration time equal to TI (VMIN(TI)), results as follows: 1 48 iINS MIN I NS EXP k VTIRR (43) (43) takes into account that TE is set equal to 5 EXP (§ 3.3.2). Expressions (37)-(43) provide the rationale for the op- timization of ventilation control in AD_TRIANG during the time of inspiration. k1i value required for delivering in the same time (TI = 5 INS) the same VTID as in AD_SQUARE (ksqu1i) can be determined by setting (42) equal to (11), obtaining the  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 327 following expression: 14 E XT squ iINS PI PEEP k (44) Under the last condition (k1i = ksqu1i), the following ex- pressions result: 4 E XT PI PEEP PIP PI (45) PAP PI (46) 4 E XT PI PEEP PIPPAP (47) 4 E XT INS INS INS PI PEEP PIP PAP TI RR (48) So, the peak of INS and PIP required in AD_TRIANG for delivering in the same time (TI = 5 INS) the same VTID and thus for reaching the same PAP as in AD_SQUARE shows a 75% reduction and increases a quarter of the difference between upper (PI) and lower (PEEPEXT) pAW constant levels, respectively. The diagnostic procedure has to be implemented as follows. According to both (1) and (31), the measure- ment of the time required for reaching the end of tran- sient inspiration time (tTI = 5 INS), i.e. for observing a differential increase of INS with time lower than one percent (1%) or saturated INS ( INS(tTI=5 INS)), is useful for the determination of INS, as follows: 5 TI INS t (49) According to (39), for a given k1i value, the monitoring of INS(tTI=5 INS) leads to the determination of CP, as follows: 1 (5) I NS TIINS Pi t Ck (50) From (1), (49) and (50), RINS can be determined as fol- lows: 1 5(5) INSTI i INS P INS TIINS tk RCt (51) Once INS, CP and RINS have been determined, TI should be set equal to the measured tTI (TI = tTI) and k1i regula- tion should be performed in order to fit the clinical re- quirements on PIP, PAP, VTID or VMIN through (37), (40), (42) or (43), respectively. In particular, concerning with dual-control mode, k1i values ensuring the pre-set VTID (k1iTID) or VMIN (k1iMIN) can be determined from (42) or (43), as follows: 14 TID iTID P INS V kC (52) 148 M IN INSEXP iMIN INS VR R k (53) PIP values resulting from VTID (PIPTID) or VMIN (PIPMIN) dual-control mode, can be obtained by inserting (52) or (53) into (37), as follows: 5 4 TID TID EXT P V PIP PEEPC (54) 5 48 MIN INSEXP MIN EXT VR R PIP PEEP (55) (54) and (55) show that PIPTID or PIPMIN are independ- ent on RRES or CP, respectively. That is extremely rele- vant from both physiopathological and clinical point of view since an increase of RRES (obstructive process) or a reduction of CP (restrictive process) does not affect the maximum pAW value reached for dual-control mode with pre-set VTID or VMIN, respectively. The compensation procedure is required in order to assimilate ALVS with an ideal pAW generator providing for a real AD_TRIANG, i.e. triangular waveform as pAW excitation insensitive to patient’s respiratory characteris- tics and ventilator settings, through a proper triangular waveform of external resistance (REXT) of ALVS which controls pAW [9]. The electrical-equivalent network of ALVS is shown in Figure 7. According to ALVS con- figuration and performances [9], the compensation pro- cedure requires that during both inspiration and expira- tion the airflow crossing REXT, i.e. the external airflow ( EXT), must be kept constant and equal to the equilib- rium value assumed in initial steady conditions during apnea ( EXT0), for which the following expressions re- sult: Figure 7. Electrical-equivalent network of ALVS. The compo- nents crossed with folded arrows are devices whose character- istic parameter output can be varied according to input setting control.  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 328 0 RES (56) 00 0 G EXT VENG P R (57) 0 00 0 G EXT EXTEXTEXTG PR PEEPR R (58) VEN0 is the steady equilibrium value assumed by the ventilation airflow ( VEN), i.e. the airflow delivered by the generator. REXT0 is the lowest REXT value set for PEEPEXT regulation by means of (58). PG and RG0 are the output pressure and equilibrium value assumed by the internal resistance (RG) of ALVS generator, respectively, both set for VEN0 regulation by means of (57), according to the following initial steady condition: 00G EXT RR (59) Considering (58), (59) implies the following condition: G EXT PPEEP (60) If EXT is stabilized on constant steady EXT0 value, AD_TRIANG can be obtained by modeling REXT wave- form (REXT(t)) as linear increasing of REXT from REXT0 to its maximum value (* E XT R) during inspiration (0 ≤ ti ≤ TI) and as instantaneous fall of REXT from * E XT R to REXT0 followed by constant keeping of REXT on REXT0 during expiration (0 ≤ te ≤ TE). From (57) and (58), * E XT R is determined as follows: *00 0 G EXT EXT E XT GEXT R PIPRPIP PIP RP PEEP (61) In particular, concerning with dual-control mode, * E XT R values ensuring the pre-set VTID (*TID E XT R) or VMIN (* M IN E XT R) can be obtained by inserting (54) or (55) into (61), respectively, and considering (9), as follows: * 0 5 14 TID TID EXT EXT V RR F RC (62) * 0 5 148 MIN INSEXP MIN EXT EXTEXT VR R RR PEEP (63) So, R EXT(ti) to be implemented for dual-control mode during inspiration (0 ≤ ti ≤ TI) with pre-set VTID (REXT(ti)TID) or VMIN (REXT(ti)MIN), assumes the following expressions: 014 TID TID i EXT iEXTINS Vt Rt RFRC (64) 0148 M ININSEXP i MIN EXT iEXTINS VR Rt Rt RR FRC (65) The stabilization of EXT during inspiration ( EXTi(ti)) on EXT0 can be carried out by proper modeling VEN wave- form during inspiration ( VENi(ti)) according to the first Kirchhoff’s low applied at airways node of ALVS’s net- work (Figur e 7): 0VENi iEXTi iINS iEXTINS i ttt t (66) By inserting both (57) and (31) into (66), the following expression results: 1 0 1e i INS t G VENiii P G P tkC R (67) The second Kirchhoff’s low applied to the circuit of ALVS generator (Figure 7), assumes the following ex- pression: 0 GGii VENiiAWii PRtt p t (68) RGi(ti) is the RG waveform to be implemented for per- forming an effective compensation procedure during inspiration. By inserting both (67) and (20) into (68), RGi(ti) can be determined as follows: 1 1 0 1e i INS GEXTi i Gi it GiP G PPEEP kt Rt PkC R (69) From (69), on account of (60), the maximum (RGi*) and minimum (Gi R ) values assumed by RGi(ti) at the beginning (ti = 0) and at end (ti = TI) of the time during inspiration (ti), respectively, result as follows: * 0 0 Gi GiG RR R (70) 1 0 Gi G Gi GiP G PPIP RRTIPkC R (71) So, considering that in coincidence with the end of in- spiration (ti = TI ), i.e. the end of transient inspiration time, RGi and REXTi assume their minimum (Gi R) and maximum (* E XT R) values, respectively, RGi modeling must take into account the following final steady condition: * Gi E XT RR (72) According to both (70) and (71), i.e. to condition Gi R < RG0 and considering (61), (72) implies the following condition: G PPIP (73) Obviously, (72) and (73) replace (59) and (60), re- spectively. On account of both (73) and (58), (69) and (71) reduce to the following expressions, respectively: 1 0 0 10 1e 1e i INS i INS G Gi it GiP G G EXT t EXTi EXTP P Rt PkC R R PEEP PEEPk RC (74)  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 329 0 10 1 0 Gi GG EXT Gi G E XTi EXTP iP G PR PEEP RRTIPPEEPk RC kC R (75) Moreover, in order to avoid that Gi R reaches unpractical reduced values, the following condition should be prop- erly taken into account: 0 2 Gi G R R (76) Considering (75), (76) leads to the following functional limitation on k1i value: 1 00 G E XT iP GP EXT PPEEP kCRCR (77) The function RGi(ti) is reported in Figur e 8. 3.3.2. Expiration time The application of the second Kirchhoff’ law to the circuit of Figure 3 provides for the following equa- tion: 0 AWe eEXPEXP eEAe e ptR tpt (78) As AD_SQUARE, AD_TRIANG requires the fol- lowing expression of pAWe(te): AWe eEXT p tPEEP (79) As it is well known, E XP e t is defined as the time derivation of vPe(te), as follows: d d P ee EXP ee vt tt (80) Considering (3) as well as by inserting both (79) and (80) into (78), the following equation results: Figure 8. Internal resistance (RG(t)) of ALVS generator as a function of time (t) to be implemented for performing the compensation procedure in AD_TRIANG. d0 d Pe ePe e EXT EXPeP vt vt PEEP RtC (81) In order to solve Eq.81, i.e. to find out the transient and steady expressions of vPe(te), it is useful to trans- form it from time (te) to Laplace (s) variable domains, as follows: 00 Pe EXT EXP PePeP vs PEEP Rsvsv sC (82) From both (2) and (38), on account of continuity con- dition on vP when the switching between inspiration and expiration takes place (vPe(0) ≡ vPi (TI)), the solu- tion of (82) consists in the following expression: 1 4 1 iPINS E XP Pe EXP F RC FRCk Cs vs ss (83) Eq.83 can be properly decomposed as follows: 1 Pe E XP AB vs ss (84) The unknown constants A and B can be determined by setting Eq.83 equal to Eq.84, resulting as follows: A = FRC (85) B = 4k1iCP INS (86) Finally, by inserting (85) and (86) into (84), the fol- lowing expression results: 1 4 1 iPINS Pe EXP kC FRC vs ss (87) According to the Inverse Laplace Transform of (87), the function vPe(te) assumes the following expression: 1 4e e E XP t PeeiPINS vtFRC kC (88) The functions EXP(te) and pEAe(te) can be determined considering (80) and (3), respectively, as follows: 1 4e e E XP t iINS EXP e EXP k tR (89) 1 4e e E XP t EAeeEXTi INS p tPEEPk (90) The functions vPe(te), EXP(te) and pEAe(te) are re- ported in Figure 4, Figure 5 and Figure 6, respec- tively. The difference between pAWe(te) and pEAe(te) (pe(te)) can be determined from both (79) and (90), as follows  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 330 (Figure 6): 1 4 e E XP t ee iINS ptk v (91) The same result of (91) could also be obtained by in- serting (89) into (78). Considering (88), (89) and (90) at the beginning of expiration time (te = 0), the following expressions result: 1 04 PeiP INSPi vFRCkCvTI (92) 1 4 0iINS EXP EXP k R (93) 1 04 EAeEXTi INSEAi pPEEPkp TI (94) (92) and (94) fit well (38) and (40), respectively, ac- cording to continuity condition required between the end of inspiration and the beginning of expiration (Figure 4 and Figure 6). Unlike our purpose, (39) together with (93) establish a considerable discontinuity occurring on RES at the end of every inspiration when the switching between inspiration and expiration takes place (Figure 5). Such problem will be soon after removed with AD_ TRAPEZ (§ 3.4). If TE is set equal to the time required for reaching the steady condition, i.e. the end of transient expiration time (tTE = 5 EXP), (88), (89), (90) and (91) provide for the following expressions: 5 1 54e 0 PeINSiP INSPi vTEFRC kCFRCv (95) 15 4 5e0 iINS EXPINS EXP k TE R (96) 5 1 54e 0 EAeINSEXTi INS EXTEAi pTEPEEP k PEEP p (97) 5 1 54e0 eINSi INS pTEk (98) (95) and (97) fit well (34) and (36), respectively, ac- cording to continuity condition required at the transition between the end of every expiration and the beginning of the following inspiration (Figure 4 and Figure 6). More- over, according to our purpose, (96) together with (35) establish the real elimination of RES discontinuity occur- ring in coincidence with such a transition (Figure 5). The diagnostic procedure has been implemented as follows. According to both (2) and (89), the measure- ment of the time required for reaching the end of tran- sient expiration time (tTE = 5 EXP), i.e. for observing a ninety nine per cent (99%) reduction of EXP with regard to its initial value ( EXP(0)), is useful for the determina- tion of EXP, as follows: 5 TE EXP t (99) According to (93), for a given k1i and INS values, the monitoring of EXP(0) leads to the determination of REXP, as follows: 1 4 0 iINS EXP EXP k R (100) From (2), (99) and (100), CP can be determined as fol- lows: 1 0 20 TE EXP EXP P E XPi INS t CRk (101) (101) can be employed for confirming the result ob- tained with (50). Once EXP, REXP and CP have been de- termined, TE should be set equal to the measured tTE (TE = tTE). So, considering (58) and (79), REXT(te) to be imple- mented for dual-control mode during expiration (0 ≤ te ≤ TE) with pre-set VTID (REXT(te)TID) or VMIN (REXT(te)MIN), assume the following expression: 0 TID MIN E XT eEXT eEXT Rt RtR (102) The compensation procedure, i.e. the stabilization of EXT during expiration ( EXTe(te)) on EXT0 can be carried out by proper modeling VEN waveform during expiration ( VENe(te)) according to the first Kirchhoff’s low applied at airways node of ALVS’s network (Figure 7): 0VENe eEXTeeEXP eEXTEXP e tttt (103) By inserting both (57) and (89) into (103), the following expression results: 1 0 4e e E XP t GiINS VENe eGEXP Pk tRR (104) The second Kirchhoff's low applied to the circuit of ALVS generator (Figure 7), assumes the following ex- pression: 0 GGee VENeeAWee PRttp t (105) RGe(te) is the RG waveform to be implemented for per- forming an effective compensation procedure during expiration. By inserting both (104) and (79) into (105), RGe(te) can be determined as follows: 1 0 4e e E XP G EXT Ge et GiINS G EXP P PEEP Rt Pk RR (106) From (106), on account of (60), the maximum (* Ge R) and minimum (Ge R ) values assumed by RGe(te) at the be- ginning (te = 0) and at end (te = TE) of the time during  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 331 expiration (te), respectively, result as follows: * 1 0 04 Ge G Ge GiINS G EXP P RR Pk RR (107) 0 Ge Ge G RRTER (108) On account of both (58) and (60), (106) and (107) re- duce to the following expressions, respectively: 1 0 0 10 4e 4e e EXP e E XP G Ge et GiINS G EXP GEXTt iEXT INS EXT EXP P Rt Pk RR RPEEP kR PEEP R (109) *0 10 04 Ge G EXT Ge iEXT INS EXT EXP R PEEP RR kR PEEP R (110) The function RGe(te) is reported in Figure 8. So that, in conclusion, the implementation of (74) and (109) during the inspiration (0 ≤ ti ≤ TI) and expiration (0 ≤ te ≤ TE) times, respectively, ensures the compensa- tion procedure to be carried out, providing for an effec- tive AD_TRIANG. From Figure 2, Figure 6, (12), (15), (16), (20), (32), (44), (79) and (90), it is easy to demonstrate that MAP and MEP values of AD_TRIANG (MAPtri and MEPtri) result as follows: 0 625 E XT INS tri EXTINS EXP PI PEEP. MAP PEEP (111) 0425 02 tri EXT E XTINS EXP INS EXP MEP PEEP PI PEEP.. (112) In comparison with (17), (111) shows a 37.5% reduction of the component of MAPtri above PEEPEXT with regard to the same component of MAPsqu. Moreover, in com- parison with (18), (112) shows a 31.3% reduction of the component of MEPtri above PEEPEXT with regard to the same component of MEPsqu, if the ratio between EXP and INS is estimated twice. 3.4. Advanced Trapez oida l Waveform as Airways Pressure Excitation (AD_TRAPEZ) Figure 9 shows the advanced trapezoidal waveform as pAW excitation (AD_TRAPEZ). In AD_TRAPEZ the time of inspiration (0 ≤ ti ≤ TI) is divided into two sub Figure 9. The advanced trapezoidal waveform as airways pre- ssure (pAW(t)) excitation (AD_TRAPEZ). sequent intervals of time lasting t1 and t2. During first (0 ≤ ti ≤ t1) and second (t1 ≤ ti ≤ t1 + t2 = TI) intervals, pAW increases linearly with an higher slope (k2i) from mini- mum or PEEPEXT to maximum or peak (PIP) values and keeps constant on PIP value, respectively. Therefore, t1, t2 and k2i fit the following conditions: 12tt TI (113) 21ii kk (114) As in AD_TRIANG, the linear increase of pAW has been selected for smoothing RES discontinuity occurring at the beginning of every inspiration, but its duration has been reduced (t1 < TI) for having a following interval (t2 = TI − t1) with constant pAW available for reducing to zero the final value of INS. Unlike AD_SQUARE and AD_TRIANG, during the time of expiration (0 ≤ te ≤ TE) pAW is no more kept constant on PEEPEXT. During the first interval of expiration (0 ≤ te ≤ t3), pAW linearly falls with a slope k2e from PIP to PEEPEXT values for reduc- ing to zero the initial value of EXP, while during the second interval of expiration (t3 ≤ te ≤ t3 + t4 = TE) pAW keeps constant on PEEPEXT value for reducing to zero the final value of EXP. Obviously, t3 and t4 fit the fol- lowing condition: t3 + t4 = TE (115) In such a way, according to our purpose, the discontinu- ity on RES occurring in AD_TRIANG at the end of every inspiration when the switching between inspiration and expiration takes place can be completely removed. AD_TRAPEZ can be carried out by connecting the patient’s airways with an ideal generator creating a trapezoidal waveform of pAW. The electrical-equivalent circuit of AD_TRIANG generator connected to the pa- tient’s airways is shown in Figure 10. 3.4.1 Inspiration Time Concerning the first interval of inspiration (0 ≤ ti ≤ t1),  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 332 Figure 10. Electrical-equivalent circuit of AD_TRAPEZ gen- erator connected to the patient’s airways. according to the results of § 3.3.1, if t1 is set equal to 2 INS (t1 = 2 INS), the following expressions result: 2 12 2 AWiINSEXTi INS ptPIPPEEP k (116) 2 2 2 122 1e 114 piINSi PINSINS iPINS vtFRCk C FRC.k C (117) 2 22 121e0.86 I NSINSi Pi P tkC kC (118) 2 12 12 1.14 pi INS EAi INSP E XTi INS vt pt C PEEPk (119) 2 1212 12 0.86 i INSAWi INSEAi INS iINS ptptpt k (120) According to AD_SQUARE analysis (§ 3.1), during the second interval of inspiration (t1 ≤ ti ≤ t1 + t2 = TI), on account of initial conditions (ti = t1) established by (116)-(120), the following expressions can be deduced: 2 12 AWiiAWiEXTi INS pt ptPIPPEEPk (121) 1 1 2 11e 20.86e i INS i INS tt EAi iAWii tt EXTiINS pt ptpt PEEP k (122) 1 220.86e i INS Pi iEAiiP tt iPINS vtp tC FRCk C (123) 1 2 0.86 e i I NS tt i iAWi iEAi iiINS ptptptk (124) 1 2 0.86 e i I NS tt ii INSii P INS pt tkC R (125) The functions vPi(ti), INS(ti) and pEAi(ti) are reported in Figure 11, Figure 12 and Figure 13, respectively. If t2 is set equal to 3 INS (t2 = 3 INS) and from (113), the following conditions result: 5 I NS TI (126) 21.51tt (127) Condition (126) allows the best functional comparison between AD_SQUARE, AD_TRIANG and AD_TRA- PEZ, while condition (127) represents the best trade-off for minimizing the final value of INS anyhow retaining a sufficient degree of smoothing on INS rising at the be- ginning of inspiration (Figure 12). At the end of inspiration time (ti = TI) with an AD_TRAPEZ for which both (126) and (127) result, the following expressions can be deduced: 2 512 2 AWiINS AWiINS EXTi INS pTIptPIP PEEP k (128) 3 2 2 5 2 0.86e 2 EAiINS EXTi INS EXTi INS pTI PAP PEEP k PEEP k (129) 2 55 2 p i INSEAiINSP iPINS vTIpTIC FRCk C (130) 555 0 i INSAWi INSEAi INS pTIpTIp TI (131) 5 50 iINS INS INSINS pTI TI R (132) 2 5502 TIDINSpiINSpiiP INS VTIvTIv kC (133) From both (12) and (133), VMIN for an inspiration time equal to TI (VMIN(TI)), results as follows: 2 24 iINS MIN I NS EXP k VTIRR (134) (134) takes into account that TE is set equal to 5 EXP (§ 3.4.2). According to our purpose, (131) and (132) establish the reduction to zero of both pi(TI) and INS(TI).  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 333 Figure 11. Lung volume (vP(t)) as a function of time (t) result- ing from the application of AD_TRAPEZ. Figure 12. Respiratory airflow ( RES(t)) as a function of time (t) resulting from the application of AD_TRAPEZ. Figure 13. Endoalveolar pressure (pEA(t)) as a function of time (t) resulting from the application of AD_TRAPEZ. Expressions (116)-(134) provide the rationale for the optimization of ventilation control in AD_TRAPEZ during the time of inspiration. k2i value required for delivering in the same time (TI = 5 INS) the same VTID as in AD_TRIANG (k1i), can be de- termined by setting (133) equal to (42), as follows: 21 2 ii kk (135) Therefore, by comparing Eqs.37-43 with Eqs.116-134 in those the condition (135) has to be taken into account, the following consideration can be deduced. With the same TI, VTID and thus PAP values, pAW increasing slope of AD_TRAPEZ is practically doubled while the compo- nent of PIP above PEEPEXT and the peak of INS ( INS (ti=t1)), still independent on RINS, show a 20% reduction and a 72% increase, respectively, compared to those of AD_TRIANG. According to our purpose, pi(TI) and thus INS(TI) are both practically reduced to zero Figure 13 and Figure 12). k2i value required for delivering in the same time (TI = 5 INS) the same VTID as in AD_SQUARE (ksqu2i), can be determined by setting (133) equal to (11), obtaining the following expression: 21 2 2 EXT s quisqu i INS PI PEEP kk (136) Under the last condition (k2i = ksqu2i), the following expressions result: PIP PI (137) PAP PI (138) 0PIPPAP (139) 043 1 E XT INS INS .PIPEEP tR (140) So, the peak of INS and PIP required in AD_TRAPEZ for delivering in the same time (TI = 5 INS) the same VTID and thus for reaching the same PAP as in AD_SQUARE shows a 57% reduction and keeps equals to the upper (PI) pAW constant level, respectively. The diagnostic procedure has to be implemented as follows. The time required for reaching the end of tran- sient inspiration time (tTI = 5 INS) cannot be precisely measured with AD_TRAPEZ, due to the influence of unknown INS on t1 and t2. The regular application of AD_TRIANG (§ 3.3.1) every few minutes represents the most suitable way to solve such problem. Once tTI has been evaluated in such a way, INS can be determined by means of (49). According to (118), for a given k2i value, the monitoring of INS(t1=2 INS) leads to the determina- tion of CP, as follows: 2 12 0.86 I NS INS Pi t Ck (141) From (1), (49) and (141), RINS can be determined as fol- lows: 2 0.86 512 INSTI i INS P I NS INS tk RCt (142) Once INS, CP and RINS have been determined, TI should  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 334 be set equal to the measured tTI (TI = tTI) and k2i regulation should be performed in order to fit the clinical require- ments on PIP, PAP, VTID or VMIN through (128), (129), (133) or (134), respectively. In particular, concerning with dual-control mode, k2i values ensuring the pre-set VTID (k2iTID) or VMIN (k2iMIN) can be determined from (133) or (134), as follows: 22 TID iTID P INS V kC (143) 224 MIN INSEXP iMIN INS VRR k (144) PIP values resulting from VTID (PIPTID) or VMIN (PIPMIN) dual-control mode, can be obtained by inserting (143) or (144) into (128), as follows: TID TID EXT P V PIPPEEPC (145) 12 M IN INSEXP MIN EXT VR R PIP PEEP (146) In the same way as (54) and (55), (145) and (146) show that PIPTID or PIPMIN are independent on RRES or CP, respectively. That is, again, extremely relevant from both physiopathological and clinical point of view since an increase of RRES (obstructive process) or a reduction of CP (restrictive process) does not affect the maximum pAW value reached for dual-control mode with pre-set VTID or VMIN, respectively. Moreover, by comparing (145) and (146) with (54) and (55), respectively, the component of PIPTID and PIPMIN above PEEPEXT of AD_TRAPEZ both show a 20% reduction with respect to those of AD_ TRIANG. The compensation procedure is required in order to assimilate ALVS with an ideal pAW generator providing for a real AD_TRAPEZ, i.e. trapezoidal waveform as pAW excitation insensitive to patient’s respiratory characteris- tics and ventilator settings through a proper trapezoidal waveform of external resistance (REXT) of ALVS which controls pAW [9]. The electrical-equivalent network of ALVS is shown in Figure 7. With the same approach described in § 3.3.1, if EXT is stabilized on constant steady EXT0 value, AD_TRAPEZ can be obtained by modeling REXT waveform during inspiration (REXTi(ti)) as linear increasing of REXT from REXT0 to * E XT R in the first interval (0 ≤ ti ≤ t1) and as constant keeping of REXT on * E XT R in the second interval (t1 ≤ ti ≤ t1 + t2), respectively, while during expiration (REXTe(te)) as linear decreasing of REXT from * E XT R to REXT0 in the first interval (0 ≤ te ≤ t3) and as constant keeping of REXT on REXT0 in the second interval (t3 ≤ te ≤ t3 + t4), respectively. In particular, concerning with dual-control mode, * E XT R values en- suring the pre-set VTID (*TID E XT R) or VMIN (* M IN E XT R) can be obtained by inserting (145) or (146) into (61), respec- tively, and considering (9), as follows: * 01 TID TID EXT EXT V RR F RC (147) * 0112 MIN INSEXP MIN EXT EXTEXT VR R RR PEEP (148) So, REXT(ti) to be implemented for dual-control mode during the first (0 ≤ ti ≤ t1) and second (t1 ≤ ti ≤ TI) in- terval of inspiration (0 ≤ ti ≤ TI) with pre-set VTID (REXT(ti)TID) or for VMIN (REXT(ti)MIN), assume the following expressions: 0 (01)12 TID TIDi EXT iEXTINS Vt RttRFRC (149) 0 01 124 M ININSEXP i MIN EXT iEXTINS VR Rt RttR RFRC (150) * 1TID TID E XT iEXT RttTI R (151) * 1 M IN MIN E XT iEXT RttTI R (152) According to (66), the stabilization of EXT during inspi- ration ( EXTi(ti)) on EXT0 can be carried out by proper modeling VEN waveform during inspiration ( VENi(ti)). Concerning the first interval of inspiration (0 ≤ ti ≤ t1), on account of (20) and (31) with k2i instead of k1i as well as (57), (66) and (68), the following expressions result: 2 0 1e i INS t G VENiii P G P tkC R (153) 2 2 0 1e i INS GEXTii Gi it GiP G PPEEPkt Rt PkC R (154) With k2i instead of k1i, (70)-(77) can be retained and in particular, (74) assumes the following expression: 2 0 0 20 1e 1e i INS i INS G Gi it GiP G G EXT t EXTiEXTP P Rt PkC R RPEEP PEEPk RC (155) Concerning the second interval of inspiration (t1 ≤ ti ≤ t1 + t2 = TI), on account of (121) and (125) as well as (57), (66) and (68), the following expressions result:  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 335 1 2 0 0.86 e i I NS tt G VENiiiP G P tkC R (156) 2 1 2 0 2 0.86 e i INS GEXTi INS Gi itt GiP G PPEEP k Rt PkC R (157) On account of (73) and (58), (157) reduces to the fol- lowing expressions: 1 2 0 0 1 20 0.86 e 0.86 e i INS i I NS G Gi itt GiP G G EXT tt EXTi EXTP P Rt PkC RRPEEP PEEPk RC (158) The function RGi(ti) is reported in Figur e 14. So that, the implementation of (155) and (158) during the first (0 ≤ ti ≤ t1) and second (t1 ≤ ti ≤ t1 + t2 = TI) intervals, respectively, ensures the compensation proce- dure to be carried out during the whole inspiration time (0 ≤ ti ≤ TI). 3.4.2. Expiration Time Concerning to the first interval of expiration (0 ≤ te ≤ t3), according to (128) and to Figure 9, AD_TRAPEZ re- quires the following expression of pAWe(te): 2 21 3 e AWeeEXTi INS t p tPEEPkt (159) Considering both (3) and (9) as well as by inserting both (159) and (80) into (78), the following equation results: 2 21 3 d0 d e EXTi INS Pe ePe e EXP eP t PEEP kt vt vt RtC (160) In order to solve Eq.160, i.e. to find out the transient and steady expressions of vPe(te), it is useful to transform it from time (te) to Laplace (s) variable domains, as follows: 2 2 2 2 23 00 iINS EXTi INS Pe EXP PePeP k PEEP kt ssvs Rsvsv C (161) Figure 14. Internal resistance (RG(t)) of ALVS generator as a function of time (t) to be implemented for performing the compensation procedure in AD_TRAPEZ. From (2) and (130), on account of continuity condition on vP when the switching between inspiration and expiration takes place (vPe(0) ≡ vPi(TI)), the solution of (161) con- sists in the following expression (see * in the end): Eq.162 can be properly decomposed as follows: 21 Pe E XP AB C vs s ss (163) The unknown constants A, B and C can be deter- mined by setting Eq.162 equal to Eq.163, resulting as follows: 2 2 3 iPINS kC At (164) 2 2 21 3 21 3 EXP PEXTiINS EXP iPINS B CPEEPkt FRCk Ct (165) 2 2 3 iP INSEXP kC Ct (166) Finally, by inserting (164), (165) and (166) into (163), * 222 2 2 22 23 1 E XT iINSiINS iPINS EXP EXP Pe E XP PEEP kk FRCk CsstR R vs ss (162)  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 336 the following expression results: 2 2 2 2 2 3 21 3 2 3 1 iPINS Pe EXP PEXTi INS iPINSEXP EXP kC t vs s CPEEPkt s kC t s (167) According to the Inverse Laplace Transform of (167), the function vPe(te) assumes the following expression: 2 2 2 2 3 21 3 2e 3 e E XP iPINS Pe ee EXP iPINS t iP INSEXP kC v ttFRC t kC t kC t (168) The functions EXP(te) and pEAe(te) can be determined considering (80) and (3), respectively, as follows: 2 21e 3 e EXP t iPINS EXP e kC tt (169) 2 2 2 2 3 21 3 2e 3 e EXP iINS E Ae eeEXT EXP iINS t i INSEXP k ptt PEEP t kt k t (170) The difference between pAWe(te) and pEAe(te) (pe(te)) can be determined from both (159) and (170), as follows (Figure 13): 2 21e 3 e EXP t iINSEXP ee k pt t (171) The same result of (171) could also be obtained by in- serting (169) into (78). Considering (168), (169) and (170) at the beginning of expiration time (te = 0), the following expressions result: 2 02 peiP INSpi vFRCkCvTI (172) 00 EXP (173) 2 02 EAeEXTi INSEAi pPEEPkpTI (174) (172) and (174) fit well (130) and (129), respectively, according to continuity condition required at the transi- tion between the end of inspiration and the beginning of expiration (Figure 11 and Figure 13). Moreover, ac- cording to our purpose, (173) together with (132) estab- lish the real elimination of RES discontinuity occurring in coincidence with such transition and the reduction to zero of EXP(0) (Figure 12). If t3 is set equal to EXP (t3 = EXP), the following ex- pressions result: 3 AWe EXPEXT p tPEEP (175) 2 3126 P eEXP iPINS vt FRC.kC (176) 2 126 3iINS EXP EXPEXP .k (t) R (177) 2 3126 E AeEXPEXTi INS ptPEEP. k (178) 2 3126 eEXPiINS pt .k (179) According to AD_SQUARE analysis (§ 3.1), during the second interval of expiration (t3 ≤ te ≤ t3 + t4 = TE), on account of initial conditions (te = t3) established by (175)-(179), the following expressions can be deduced: 3 AWe eAWeEXT p tptPEEP (180) 3 3 2 33e 1.26 e e EXP e E XP tt EAe eAWee tt EXTiINS pt ptpt PEEP k (181) 3 2 1.26e e E XP tt PeeEAeePiP INS vtp tC FRCkC (182) 33 2 3 e1.26e ee E XP EXP tt tt ee eiINS pt ptk (183) 3 2 1.26 e e E XP tt ee iINS EXP eEXP EXP pt k tRR (184) The functions vPe(te), EXP(te) and pEAe(te) are reported in Figure 11, Figure 12 and Figure 13, respectively. If t4 is set equal to 4 EXP (t4 = 4 EXP) and from (115), the following conditions result: 5 I NS TE (185) 443tt (186) Condition (185) allows the best functional comparison between AD_SQUARE, AD_TRIANG and AD_TRA- PEZ, while condition (186) represents the best trade-off for minimizing the final value of EXP along with the increase of MAP (see (203)) and MEP (see (204)), any- how retaining a sufficient degree of smoothing on EXP  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 337 raising at the beginning of expiration (Figure 12). At the end of expiration time (te = TE) with an AD_TRAPEZ for which both conditions (185) and (186) result, the following expressions can be deduced: 3 5 AWeEXP AWeEXT pTE ptPEEP (187) 4 2 5126e E AeEXPEXTi INSEXT p TEPEEP.kPEEP (188) 4 2 5 1.26e PeEXP EAeP iPINS vTEp TEC FRCk C FRC (189) 4 2 51.26e0 eEXPi INS pTE k (190) 4 2 1.26 e 50 iINS EXP EXPEXP k TE R (191) (189) and (188) fit well (34) and (36), respectively, ac- cording to continuity condition required at the transition between the end of every expiration and the beginning of the following inspiration (Figure 11 and Figure 13). Moreover, according to our purpose, (191) together with (35) and (190) establish the real elimination of RES dis- continuity occurring in coincidence with such transition and the reduction to zero of both pe(TE) and EXP(TE) (Figure 12 and Figure 13). Finally, from (177) together with (93), the peak of EXP ( EXP(te=t3)) shows a 37% reduction compared to those of AD_TRIANG and AD_ SQUARE ( EXP(te = 0)). Therefore, the waveforms reported in Figure 11, Fig- ure 12 and Figure 13 compared to those reported in Figure 4, Figure 5 and Figure 6, respectively, show clearly that AD_TRAPEZ induces a more physiological reaction than AD_TRIANG. This is essensially due to the elimination in AD_TRAPEZ of discontinuity on RES occurring in AD_TRIANG when the switching between inspiration and expiration takes place. The diagnostic procedure has to be implemented as follows. The time required for reaching the end of tran- sient expiration time (tTE = 5 EXP) cannot be precisely measured with AD_TRAPEZ, due to the influence of unknown EXP on t3 and t4. The regular application of AD_TRIANG (§ 3.3.2) every few minutes represents the most suitable way to solve such problem. Once tTE has been evaluated in such a way, EXP can be determined by means of (99). According to (177), for a given k2i and INS values, the monitoring of EXP(t3= EXP) leads to the de- termination of REXP, as follows: 2 1.26 3 iINS EXP E XP EXP k Rt (192) From (2), (99) and (192), CP can be determined as fol- lows: 2 3 6.3 TE EXPEXP EXP PEXPi INS tt CRk (193) (193) can be employed for confirming the result obtained with (141). Once EXP, REXP and CP have been determined, TE should be set equal to the measured tTE (TE = tTE). So, considering (58), (133), (134), (159) and (180), REXT(te) to be implemented for dual-control mode during the first (0 ≤ te ≤ t3) and second (t3 ≤ te ≤ TE) interval of expiration (0 ≤ te ≤ TE) with pre-set VTID(REXT(te)TID) or VMIN (REXT(te)MIN), assumes the following expressions: 0 031 1 3 TID e TID EXT eEXT t V RttRFRC t (194) 0 03 11 12 3 MIN INSEXP MIN e EXT eEXTEXT VR Rt RttRPEEP t (195) 0 33 TID MIN E XT eEXT eEXT RttTERttTER (196) According to (103), the compensation procedure, i.e. the stabilization of EXT during expiration ( EXTe(te)) on EXT0 can be carried out by proper modeling VEN wave- form during expiration ( VENe(te)). Concerning the first interval of expiration (0 ≤ te ≤ t3), on account of (57), (159) and (169) as well as (103) and (105), the following expressions result: 2 0 21e 3 e EXP t GiPINS VENe eG PkC tRt (197) 2 2 0 21 3 21e 3 e EXP e GEXTiINS Ge et GiPINS G t PPEEP kt Rt PkC Rt (198) On account of both (73) and (58), (198) reduces to the following expression: 2 0 0 20 21e 3 21e 3 e EXP e EXP G Ge et GiPINS G G EXT t iEXTP INS EXT P Rt PkC Rt RPEEP kR C PEEP t (199)  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 338 Concerning the second interval of expiration (t3 ≤ te ≤ t3 + t4 = TE), on account of (57), (180) and (184) as well as (103) and (105), the following expressions result: 3 2 0 1.26 1e e EXP tt GiINS VENe eGEXP Pk tRR (200) 3 2 0 1.26 1e e EXP G EXT Ge ett GiINS GEXP PPEEP Rt Pk RR (201) On account of both (60) and (58), (201) reduces to the following expressions: 3 2 0 0 3 20 1.26 1e 1.26 1e e EXP e EXP G Ge ett GiINS G EXP G EXT tt i EXTINS EXT EXP P Rt Pk RR RPEEP kR PEEP R (202) The function RGe(te) is reported in Figure 14. So that, the implementation of (199) and (202) during the first (0 ≤ te ≤ t3) and second (t3 ≤ te ≤ t3 + t4 = TE) intervals, respectively, ensures the compensation proce- dure to be carried out during the whole expiration time (0 ≤ te ≤ TE). From Figure 9, F igure 1 3, (12), (15), (16), (116), (119), (121), (122), (136), (159), (170), (180) and (181), it is easy to demonstrate that MAP and MEP values of AD_ TRAPEZ (MAPtra and MEPtra) result as follows: 08 01 tra EXT E XTINS EXP INS EXP MAP PEEP PI PEEP.. (203) 0.604 0.297 tra EXT E XTINS EXP INSEXP MEP PEEP PI PEEP (204) If the ratio between EXP and INS is estimated twice, in comparison with (17) and (18), (203) and (204) show that MAPtra and MEPtra assume quite the same values of MAPsqu and MEPsqu, respectively. 4. DISCUSSION AND CONCLUSIONS The promising experimental results, according to theo- retical ones, carried out in a previous work with the Ad- vanced Lung Ventilation System (ALVS), set for apply- ing a real square waveform as airways pressure excitation to a proper lung simulator reproducing the steady and linear respiratory mechanics of anaesthetized or severe brain injured patients, have suggested and motivated the present work. It consists in the theoretical study in the field of as- sisted/controlled ventilation with advanced and impro- ved-shape waveforms as airways pressure excitation for the optimization of controlled breathings applied to pa- tients the respiratory mechanics of which can be assumed steady and linear. Advanced means insensitive to patient (load) breathing activity as well as to ventilator settings. Improved-shape intends in comparison to conventional square waveform for a progressive approaching to phy- siological transpulmonary pressure waveform producing a more suitable reaction of patient, i.e. a more realistic approximation of respiratory airflow and endoalveolar pressure waveforms to physiological ones. The problem to be solved has been the proper smoothing of respiratory airflow vertical discontinuities occurring at the beginning of both inspiration and expiration when the respiratory airflow is reversed, as response to upward and downward airways pressure vertical transitions charac- teristic of square waveform. So that, the elimination of such airways pressure vertical transitions is the most relevant change to be applied on square waveform as airways pressure excitation. For the purpose, two wave- forms of different geometrical shape (triangular and trapezoidal) as airways pressure excitation which pro- gressively approach the best solution have been consid- ered. The results show that the application of both the di- agnostic and compensation procedures together with the setting of the time of inspiration and expiration equal to five times the inspiratory and expiratory time constants, respectively, ensure the optimization of the ventilation control in all cases with the following different functional implications. Advanced triangular (AD_TRIANG) and trapezoidal (AD_TRAPEZ) waveforms have been considered in comparison to conventional advanced square waveform (AD_SQUARE) as airways pressure excitation. The geometrical parameters of AD_TRAPEZ has been opti- mized in such a way the resulting respiratory airflow waveform does not show any vertical discontinuity ap- proximating as much as possible the smoothed shape of physiological waveform as well as keeping quite the same values of mean airways (MAP) and endoalveolar pres- sures (MEP) of AD_SQUARE. AD_SQUARE shows a low physiological profile due to the presence of two different considerable disconti- 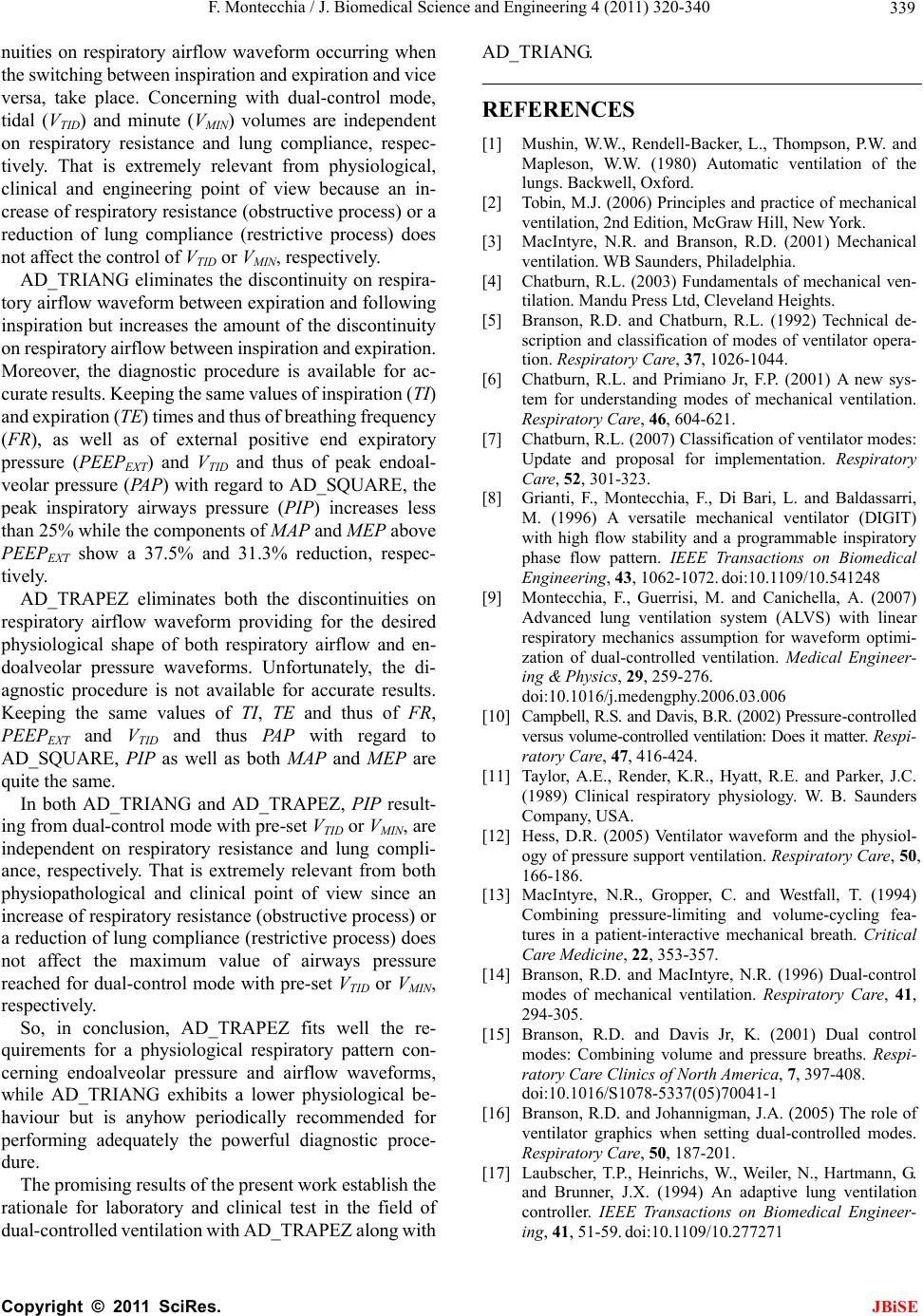 F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 339 nuities on respiratory airflow waveform occurring when the switching between inspiration and expiration and vice versa, take place. Concerning with dual-control mode, tidal (VTID) and minute (VMIN) volumes are independent on respiratory resistance and lung compliance, respec- tively. That is extremely relevant from physiological, clinical and engineering point of view because an in- crease of respiratory resistance (obstructive process) or a reduction of lung compliance (restrictive process) does not affect the control of VTID or VMIN, respectively. AD_TRIANG eliminates the discontinuity on respira- tory airflow waveform between expiration and following inspiration but increases the amount of the discontinuity on respiratory airflow between inspiration and expiration. Moreover, the diagnostic procedure is available for ac- curate results. Keeping the same values of inspiration (TI) and expiration (TE) times and thus of breathing frequency (FR), as well as of external positive end expiratory pressure (PEEPEXT) and VTID and thus of peak endoal- veolar pressure (PAP) with regard to AD_SQUARE, the peak inspiratory airways pressure (PIP) increases less than 25% while the components of MAP and MEP above PEEPEXT show a 37.5% and 31.3% reduction, respec- tively. AD_TRAPEZ eliminates both the discontinuities on respiratory airflow waveform providing for the desired physiological shape of both respiratory airflow and en- doalveolar pressure waveforms. Unfortunately, the di- agnostic procedure is not available for accurate results. Keeping the same values of TI, TE and thus of FR, PEEPEXT and VTID and thus PAP with regard to AD_SQUARE, PIP as well as both MAP and MEP are quite the same. In both AD_TRIANG and AD_TRAPEZ, PIP result- ing from dual-control mode with pre-set VTID or VMIN, are independent on respiratory resistance and lung compli- ance, respectively. That is extremely relevant from both physiopathological and clinical point of view since an increase of respiratory resistance (obstructive process) or a reduction of lung compliance (restrictive process) does not affect the maximum value of airways pressure reached for dual-control mode with pre-set VTID or VMIN, respectively. So, in conclusion, AD_TRAPEZ fits well the re- quirements for a physiological respiratory pattern con- cerning endoalveolar pressure and airflow waveforms, while AD_TRIANG exhibits a lower physiological be- haviour but is anyhow periodically recommended for performing adequately the powerful diagnostic proce- dure. The promising results of the present work establish the rationale for laboratory and clinical test in the field of dual-controlled ventilation with AD_TRAPEZ along with AD_TRIANG. REFERENCES [1] Mushin, W.W., Rendell-Backer, L., Thompson, P.W. and Mapleson, W.W. (1980) Automatic ventilation of the lungs. Backwell, Oxford. [2] Tobin, M.J. (2006) Principles and practice of mechanical ventilation, 2nd Edition, McGraw Hill, New York. [3] MacIntyre, N.R. and Branson, R.D. (2001) Mechanical ventilation. WB Saunders, Philadelphia. [4] Chatburn, R.L. (2003) Fundamentals of mechanical ven- tilation. Mandu Press Ltd, Cleveland Heights. [5] Branson, R.D. and Chatburn, R.L. (1992) Technical de- scription and classification of modes of ventilator opera- tion. Respiratory Care, 37, 1026-1044. [6] Chatburn, R.L. and Primiano Jr, F.P. (2001) A new sys- tem for understanding modes of mechanical ventilation. Respiratory Care, 46, 604-621. [7] Chatburn, R.L. (2007) Classification of ventilator modes: Update and proposal for implementation. Respiratory Care, 52, 301-323. [8] Grianti, F., Montecchia, F., Di Bari, L. and Baldassarri, M. (1996) A versatile mechanical ventilator (DIGIT) with high flow stability and a programmable inspiratory phase flow pattern. IEEE Transactions on Biomedical Engineering, 43, 1062-1072. doi:10.1109/10.541248 [9] Montecchia, F., Guerrisi, M. and Canichella, A. (2007) Advanced lung ventilation system (ALVS) with linear respiratory mechanics assumption for waveform optimi- zation of dual-controlled ventilation. Medical Engineer- ing & Physics, 29, 259-276. doi:10.1016/j.medengphy.2006.03.006 [10] Campbell, R.S. and Davis, B.R. (2002) Pressure-controlled versus volume-controlled ventilation: Does it matter. Respi- ratory Care, 47, 416-424. [11] Taylor, A.E., Render, K.R., Hyatt, R.E. and Parker, J.C. (1989) Clinical respiratory physiology. W. B. Saunders Company, USA. [12] Hess, D.R. (2005) Ventilator waveform and the physiol- ogy of pressure support ventilation. Respiratory Care, 50, 166-186. [13] MacIntyre, N.R., Gropper, C. and Westfall, T. (1994) Combining pressure-limiting and volume-cycling fea- tures in a patient-interactive mechanical breath. Critical Care Medicine, 22, 353-357. [14] Branson, R.D. and MacIntyre, N.R. (1996) Dual-control modes of mechanical ventilation. Respiratory Care, 41, 294-305. [15] Branson, R.D. and Davis Jr, K. (2001) Dual control modes: Combining volume and pressure breaths. Respi- ratory Care Clinics of North America, 7, 397-408. doi:10.1016/S1078-5337(05)70041-1 [16] Branson, R.D. and Johannigman, J.A. (2005) The role of ventilator graphics when setting dual-controlled modes. Respiratory Care, 50, 187-201. [17] Laubscher, T.P., Heinrichs, W., Weiler, N., Hartmann, G. and Brunner, J.X. (1994) An adaptive lung ventilation controller. IEEE Transactions on Biomedical Engineer- ing, 41, 51-59. doi:10.1109/10.277271  F. Montecchia / J. Biomedical Science and Engineering 4 (2011) 320-340 Copyright © 2011 SciRes. JBiSE 340 [18] Sanborn, W.G. (1993) Microprocessor-based mechanical ventilation. Respiratory Care, 38, 72-109. [19] Simon, F., Jenayeh, I. and Rake, H.H. (2000) Mecha- tronics in medical engineering: Advanced control of a ventilation device. Microprocessors and Microsystems, 24, 63-69. doi:10.1016/S0141-9331(99)00068-X [20] Brunner, J.X. (2001) Principles and history of closed- loop controlled ventilation. Respiratory Care Clinics of North Amer ica, 7, 341-362. [21] Branson, R.D., Johannigman, J.A., Campbell, R.S. and Davis Jr., K. (2002) Closed-loop mechanical ventilation. Respiratory Care, 47, 427-451. [22] Anderson, J.R. and East, T.D. (2002) A closed-loop con- troller for mechanical ventilation of patients with ARDS. Biomedical Sciences Instrumentation, 38, 289-294. [23] Tehrani, F.T., Rogers, M., Lo, T., Malinowski, T., Afu- wape, S., Lum, M., Grundl, B. and Terry, M. (2004) A dual closed-loop control system for mechanical ventila- tion. Journal of Clinical Monitoring and Computing, 18, 111-129. doi:10.1023/B:JOCM.0000032744.99885.38 [24] Takeuchi, A., Abe, T., Hirose, M., Kamioka, K., Hamada, A. and Ikeda, N. (2004) Interactive simulation system for artificial ventilation on the internet: Virtual ventilator. Journal of Clinical Monitoring and Computing, 18, 353- 363. doi:10.1007/s10877-005-6268-0 [25] Chatburn, R.L. (2004) Computer control of mechanical ventilation. Respiratory Care, 49, 507-515. [26] Tehrani, F.T. and Roum, J.H. (2008) Flex: A new com- puterized system for mechanical ventilation. Journal of Clinical Monitoring and Computing, 22, 121-130. [27] Tehrani, F.T. (2008) Automatic control of mechanical ventilation. Part 1: Theory and history of the technology. Journal of Clinical Monitoring and Computing, 22, 409- 415. doi:10.1007/s10877-008-9150-z [28] Tehrani, F.T. and Abbasi, S. (2009) Evaluation of a com- puterized system for mechanical ventilation of infants. Journal of Clinical Monitoring and Computing, 23, 93- 104. doi:10.1007/s10877-009-9170-3 [29] Barrera, R., Gabovich, N., Sogoloff, H., Groeger, J. and Miodownik, S. (2005) The effect of varying inspiratory flow waveforms on alveolar peak airway pressure and intrinsic positive end expiratory pressure in mechanically ventilated patients. The Internet Journal of Pulmonary Medicine, 5. [30] Yang, S.C. and Yang, S.P. (2002) Effects of inspiratory flow waveforms on lung mechanics, gas exchange, and respiratory metabolism in COPD patients during me- chanical ventilation. Chest, 122, 2096-2104. [31] Niranjan, S.C., Bidani, A., Ghorbel, F., Zwischenberger, J. B. and Clark Jr, J.W. (1999) Theoretical study of inspira- tory flow waveforms during mechanical ventilation on pulmonary blood flow and gas exchange. Computers and Biomedical Research, 32, 355-390. [32] Lutchen, K.R., Hantos, Z. and Jackson, A.C. (1988) Im- portance of low-frequency impedance data for reliably quantifying parallel inhomogeneities of respiratory me- chanics. IEEE Transactions on Biomedical Engineering, 35, 472-481. doi:10.1109/10.2118 [33] Burke, W.C., Crooke, P.S., Marcy, T.W., Adams, A.B. and Marini, J.J. (1993) Comparison of mathematical and Journal of Applied Physiology, 74, 922-933. [34] Jonson, B., Beydon, L., Brauer, K., Mansson, C., Valind, S. and Grytzell, H. (1993) Mechanics of respiratory sys- tem in healthy anesthetized humans with emphasis on viscoelastic properties. Journal of Applied Physiology, 75, 132-140. [35] Conti, G., De Blasi, R.A., Lappa, A., Ferretti, A., An- tonelli, M., Bufi, M. and Gasparetto, A. (1994) Evalua- tion of respiratory system resistance in mechanically ventilated patients: The role of the endotracheal tube. In- tensive Care Medicine, 20, 421-424. [36] Crooke, P.S., Hota, S., Marini, J.J. and Hotchkiss, J.R. (2003) Mathematical models of passive, pressure-controlled ventilation with different resistance assumptions. Mathe- matical and Computer Modelling, 38, 495-502. doi:10.1016/S0895-7177(03)90021-5 [37] Milic-Emili, J., Gottfried, S.B. and Rossi, A. (1987) Non- invasive measurement of respiratory mechanics in ICU patients. International Journal of Clinical Monitoring and Computing, 4, 11-30. [38] Baconnier, P.F., Carry, P.Y., Eberhard, A., Perdrix, J.P. and Fargnoli, J.M. (1995) A computer program for auto- matic measurement of respiratory mechanics in artifi- cially ventilated patients. Computer Methods and Pro- gram in Biomedicine, 47, 205-220. doi:10.1016/0169-2607(95)01651-9 [39] Lucangelo, U., Bernabè, F. and Blanch, L. (2005) Respi- ratory mechanics derived from signals in the ventilator circuit. Respiratory Care, 50, 55-65. [40] Bates, J.H., Hunter, I.W., Sly, P.D., Okubo, S., Filiatrault, S. and Milic-Emili, J. (1987) Effect of valve closure time on the determination of respiratory resistance by flow in- terruption. Medical and Biological Engineering Com- puting, 25, 136-140. doi:10.1007/BF02442841 [41] Bates, J.H., Baconnier, P. and Milic-Emili, J. (1988) A theoretical analysis of interrupter technique for measur- ing respiratory mechanics. Journal of Applied Physiology, 64, c f2204-2214. [42] Lutchen, K.R., Yang, K., Kaczka, D.W. and Suki, B. (1993) Optimal ventilation waveforms for estimating low -frequency respiratory impedance. Journal of Applied Physiology, 75, 478-488. [43] Barnas, G.M., Harinath, P., Green, M.D., Suki, B., Kac- zka, D.W. and Lutchen, K.R. (1994) Influence of wave- form and analysis technique on lung and chest wall pro- perties. Respiratory Physiology, 96, 331-344. [44] Kaczka, D.W., Ingenito, E.P. and Lutchen, K.R. (1999) Technique to determine inspiratory impedance during mechanical ventilation: Implication for flow limited pa- tients. Annals of Biomedical Engineering, 27, 340-355. [45] Marini, J.J. and Crooke, P.S. (1993) A general mathe- matical model for respiratory dynamics relevant to the clinical setting. American Review of Respiratory Disease, 147, 14-24. [46] Bates, J.H. (2007) A recruitment model of quasi-linear power-law stress adaptation in lung tissue. Annals of Biomedical Engineering, 35, 1165-1174. doi:10.1007/s10439-007-9291-0 |