L. YU ET AL.
228
problem, so many research papers have all expounded.
Most of the existing heuristic algorithm is based on an
independent task, and dependent task is researched in a
homogeneous environment with the same structure, which
composed of uniformity machine. For example, Shang [1]
and others adopt a new list of scheduling technology to
control dependence task scheduling in environment with
the same structure. Wu [2] and others based on topo-
logical sort have proposed a fast local search algorithm
to enhance scheduling of quality and efficiency. Oliveira
[3] and others have proposed a task of scheduling algo-
rithm with fixed priority under a distributed computer
system. Above of algorithms are too many constrains,
and not the general, Carter [4] and others have developed
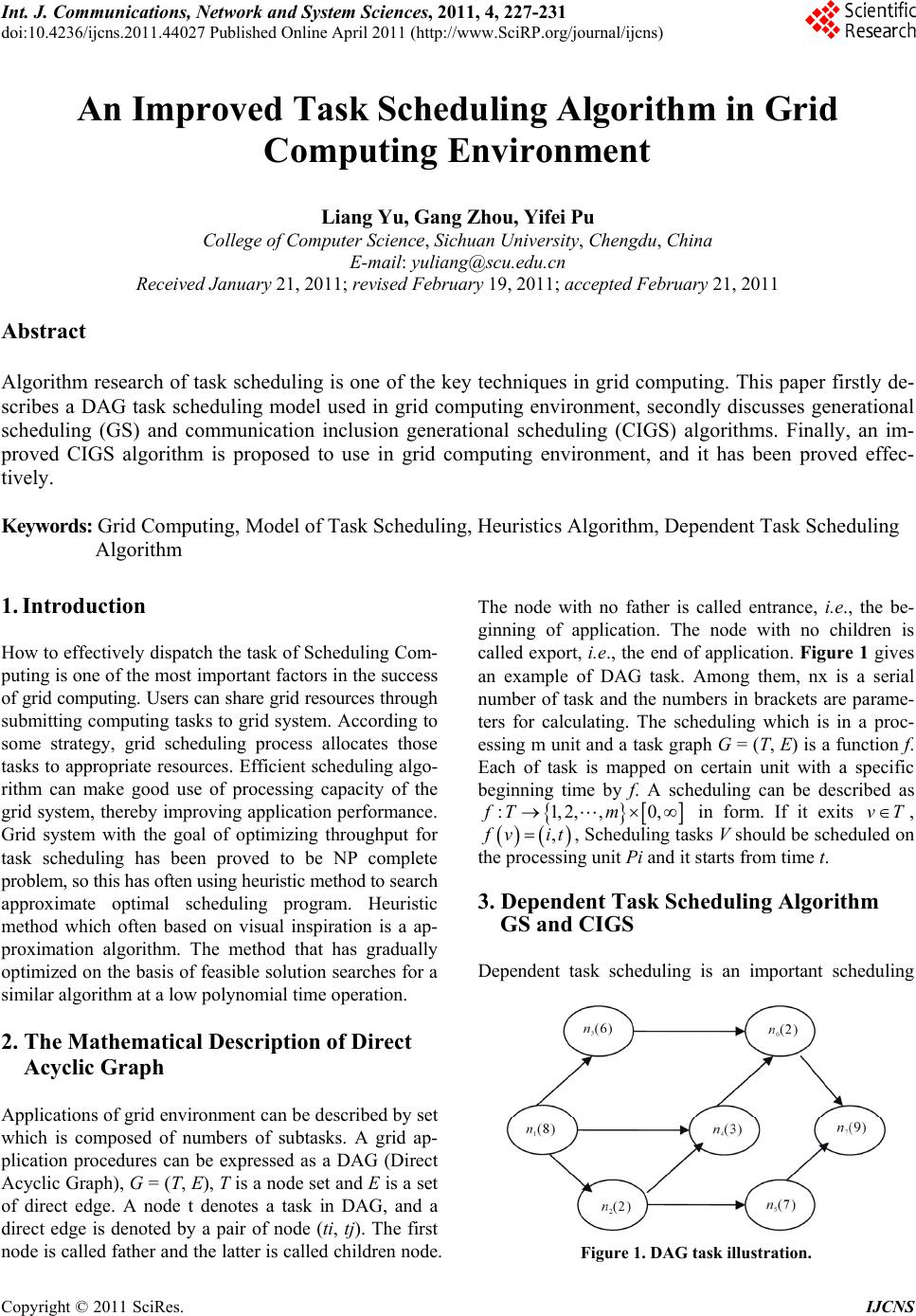
Generation Scheduling (GS) to control dependent task in
heterogeneous system. The main steps of GS algorithm
can be described as follows:
1) Create scheduling problems. The task of interde-
pendent make some tasks start after the completion
of other tasks and each task is not set up the initial
scheduling. By tracking and analyzing the task of
interdependent relationship, when a pilot task of
entire mission has been completed, then the task
can be set up to scheduling.
2) Filtering mandate. When scheduling events occur
at any one time, its not scheduling task can be fil-
tered out. Then the remaining tasks will be sched-
uled as the “independence” by the formation of a
new set SI (Set of Independent tasks). Obviously,
all of tasks in the SI have no predecessors mandate
for immediate implementation.
3) Locally scheduling.Although these setting algo-
rithms that can be selected by users should be sched-
uled, preemptive scheduling model can not be used
should be paid attention.
4) Update scheduling problem.When incidents of new
scheduling cycle started or repeated have perceived,
relevant tasks are collected. The problem of a new
dependent task scheduling is formed and the time
has been set for the machines. If all the tasks sched-
uling have finished, then it should be terminated.
Otherwise repeat the steps 1-4 (See Figure 2).
Carter and others proposed a CIGS (Communication-
Inclusive of GS) to consider communication of GS algo-
rithm, which support dependent task scheduling as a typi-
cal algorithm in heterogeneous distributed computer sys-
tem. The algorithm is simple and easy achieving. In CIGS,
through analyzing the dependence of task, the tasks that
these have been to meet the mandate of current ancestors
constrain should be filtered out from all those that have
not yet scheduling tasks, i.e. current “task independence”.
The actual scheduling of sequence and matching sched-
uling are limited to “independence mandate”. With these
First:
Formed with the
prior ity scheduling
constrains
Second:
The failed tas k of
filtering
Third:
The re al iz at i on of the
unconstraint of a
smal ler pr iority
scheduling
Fouth:
Detecti on o f
re-scheduling
events
Figure 2. GS overview.
new task scheduling and execution, the dependence tasks
possibly become the current “independence mandate”,
which are scheduled until all tasks are assigned. The
number of frequency filters has directly influence on all
tasks of expected completion time. The task of makespan
firstly filtered out as preparation time of all machine,
priority will be ensured with an orderly implementation.
However, overall makespan have increased. Its perform-
ance could be improved by reducing the number of filters
and makespan can be reduced by optimizing the prepara-
tion time of machinery. The task of scheduling at any
time or has been or is being implemented in the pro- cess
of scheduling. When CIGS map tasks to a certain re-
sources node, it could adopt an option heuristics algo-
rithm. Including all relevant data transmission to the host
node and the time cost of implementation in the host
nodes will be considered in every mapping.
Efficiency of node in the dimension of time or space
in grid computing is dynamic change. To allow CIGS
can effectively deal with grid environment, the need of
related improvement should be done. Otherwise, it would
not be appropriate to improve its performance, such as
lowering span, raising the utilization rate of resources, etc.
4. The Improvement of Task Scheduling
Algorithm CIGS
In order to solve the above problem, the paper presents
an improved algorithm CIGS to adapt computational grid
environment. In the scheduling process, by making a
judgment, if there is a 0 outdegree task in SI, it will be
filtered to form a new set of BSI. Each of BSI tasks is not
allowed to schedule in the current scheduling cycle, that
is to say, BSI, such as a free buffer zone. Similarly, its
forecast by the data transmission time, the time of ex-
pectant execution for all ancestors task and preparation
time of machines will be determinant factors of schedul-
Copyright © 2011 SciRes. IJCNS