Journal of Power and Energy Engineering, 2014, 2, 694-703
Published Online April 2014 in SciRes. http://www.scirp.org/journal/jpee
http://dx.doi.org/10.4236/jpee.2014.24093
How to cite this paper: Blumschein, J., Yelgin, Y. And Kereit, M. (2014) Blackout Prevention by Power Swing Detection and
Out-of-Step Protection. Journal of Power and Energy Engineering, 2, 694-703. http://dx.doi.org/10.4236/jpee.2014.24093
Blackout Prevention by Power Swing
Detection and Out-of-Step Protection
J. Blumschein, Y. Yelgin, M. Kereit
Infrastructure & Cities Sector, Siemens AG, Munich, Ger ma ny
Email: joerg.blumschein@siemens.com
Received December 2013
Abstract
Power swing evoked by sudden changes like faults or switching operations will become more and
more important for protective relaying, due to the growing load flow in electrical power networks.
Unwanted trips of the distance protection function must be avoided to prevent cascading effects
and blackouts in the network. Selective out-of-step-tripping is required to stop unstable power
swing and to prevent damage to affected generators. Therefore a reliable method for detection of
power swing is presented, which requires no settings for operation. Power swing can be detected
from 0.1 Hz up to 10 Hz swing frequency, also during open pole condition and during asymmetric-
al operation. A blocking logic prevents unselective trips by the distance protection. However,
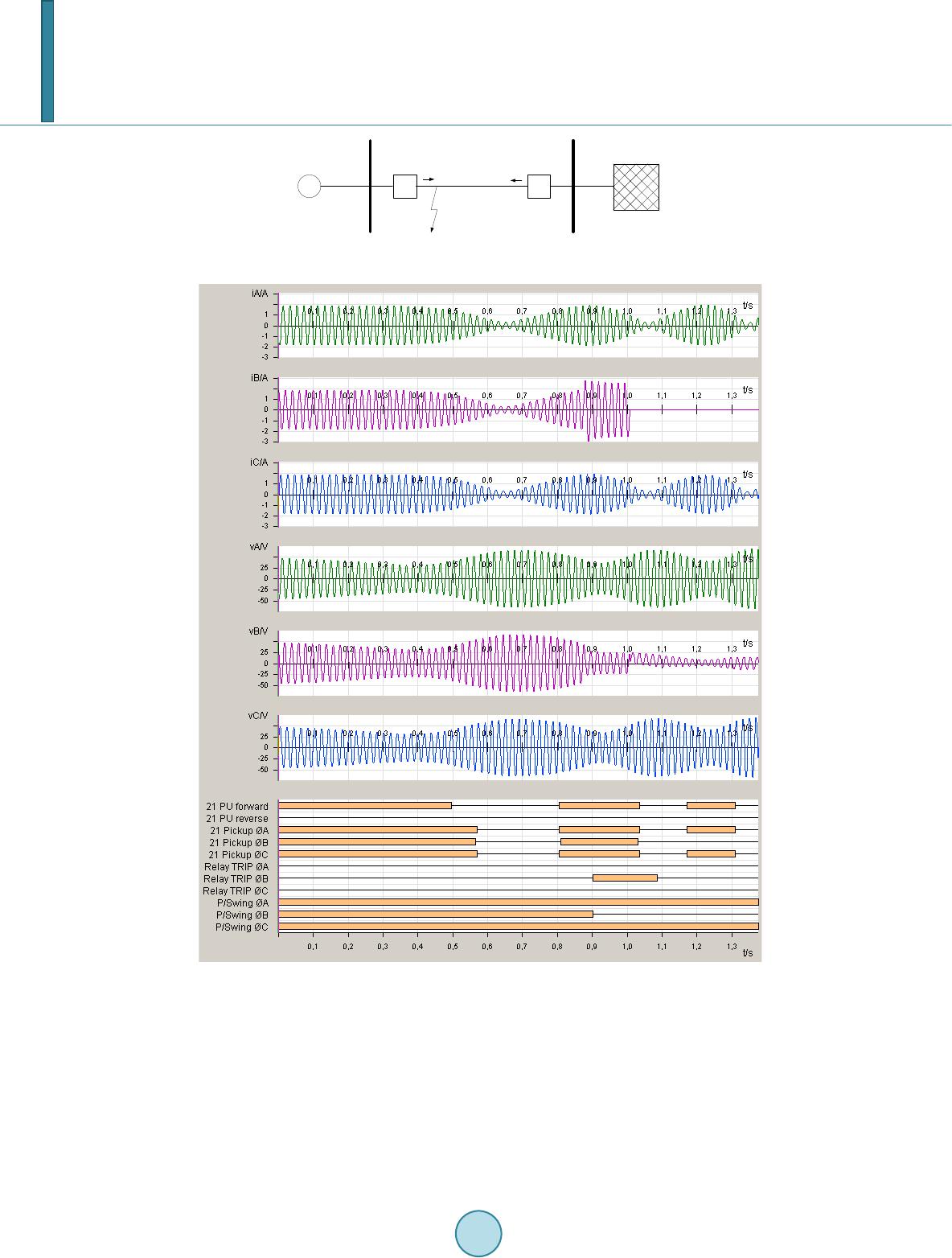
faults that occur during a power swing must be detected and cleared with a high degree of selec-
tivity and dependability. For unstable power swing a flexible out of step tripping function will be
proposed. The coordination of power swing detection, distance protection and out of step protec-
tion provides a reliable system protection.
Keywords
Power Swing Detection; Distance Protection; Out of Step Prot ecti on
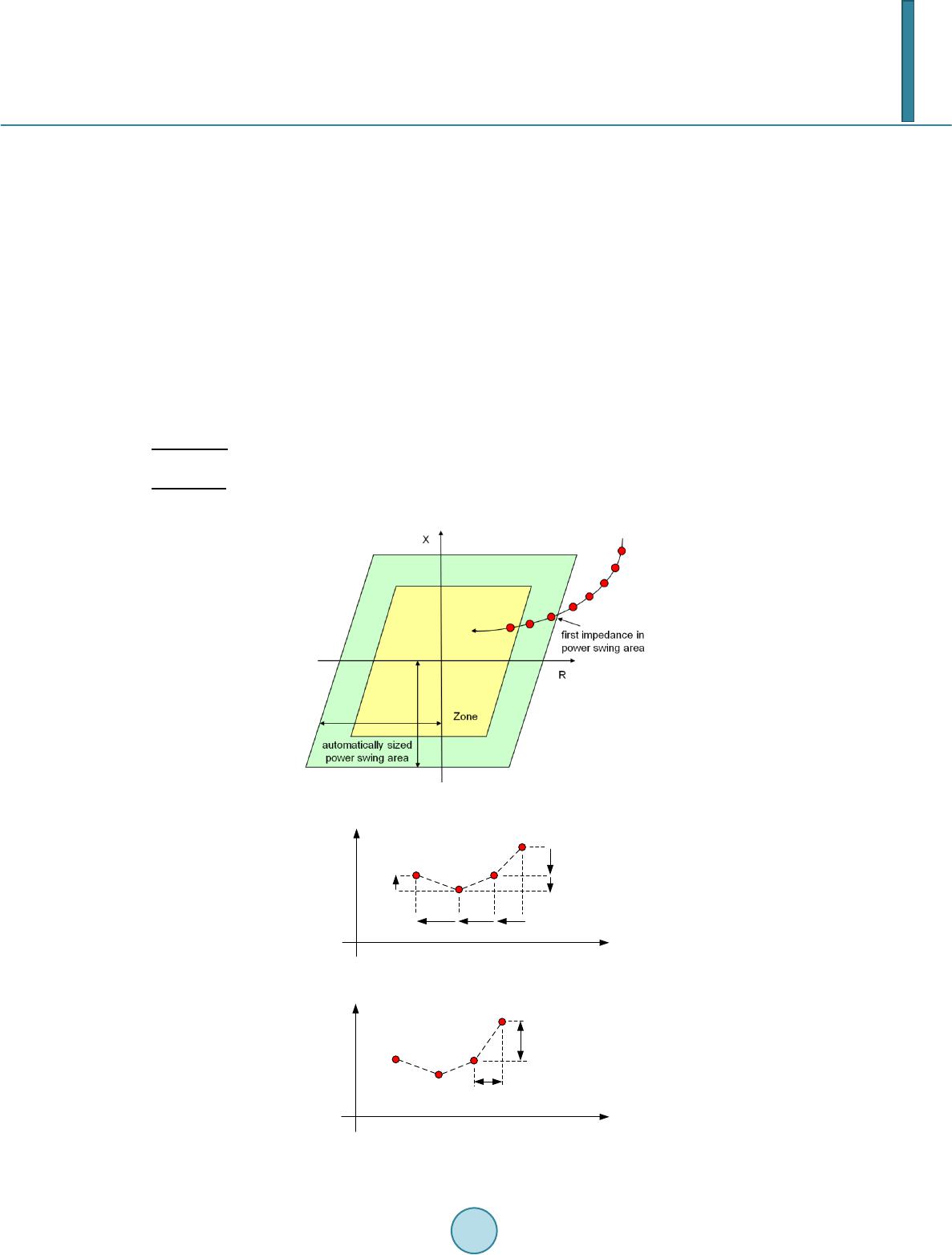
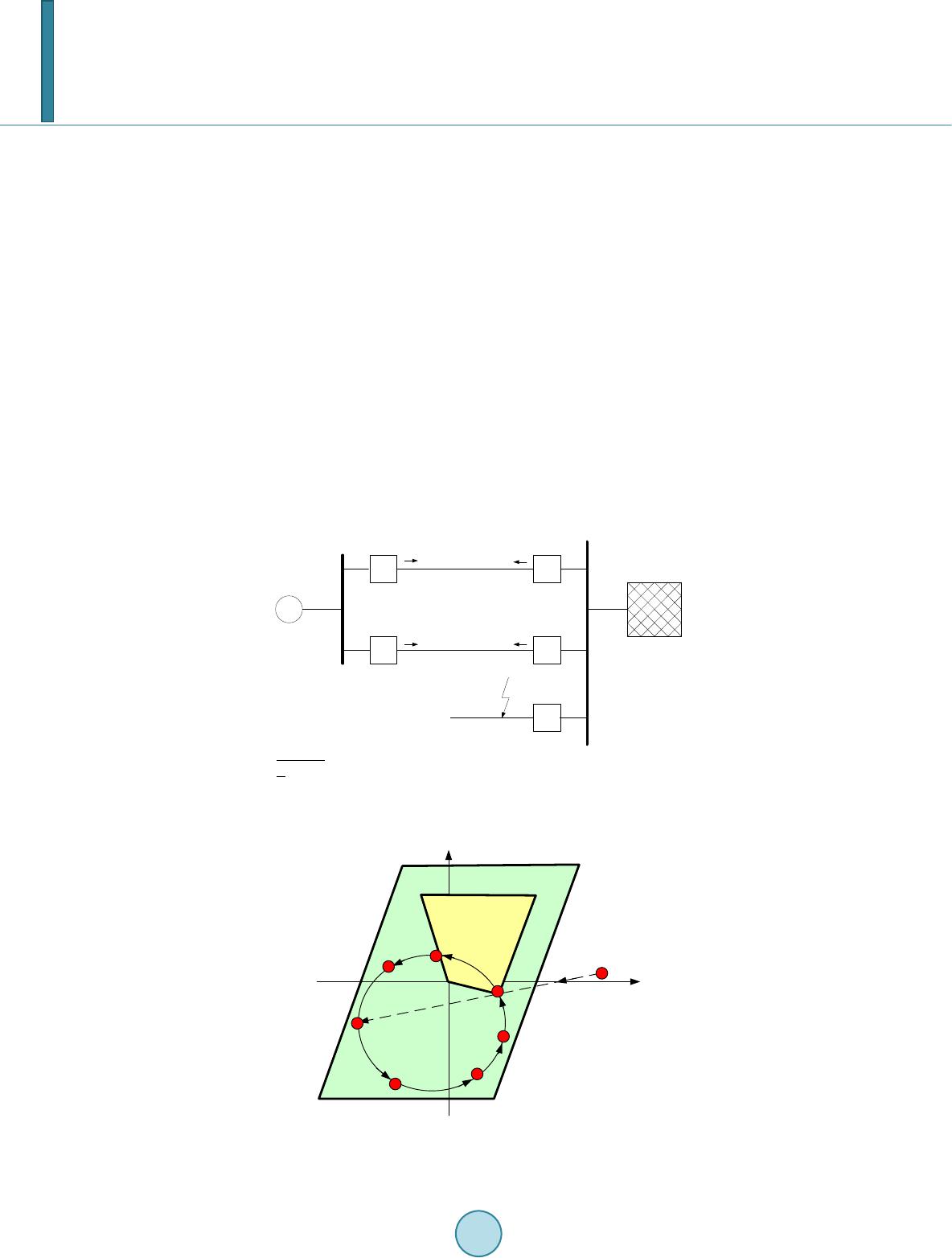
1. Power-Swing-Detection Algorithm Based on Continous Impedance Calculation
Classical power swing detection methods based on concentric characteristic or blinders need a sophisticated grid
study to determine the correct settings. The settings are fixed and will not adapt to any changed system condition.
If the grid study does not consider the worst case, then the appearance of a power swing or out of step condition
could lead to a maloperation.
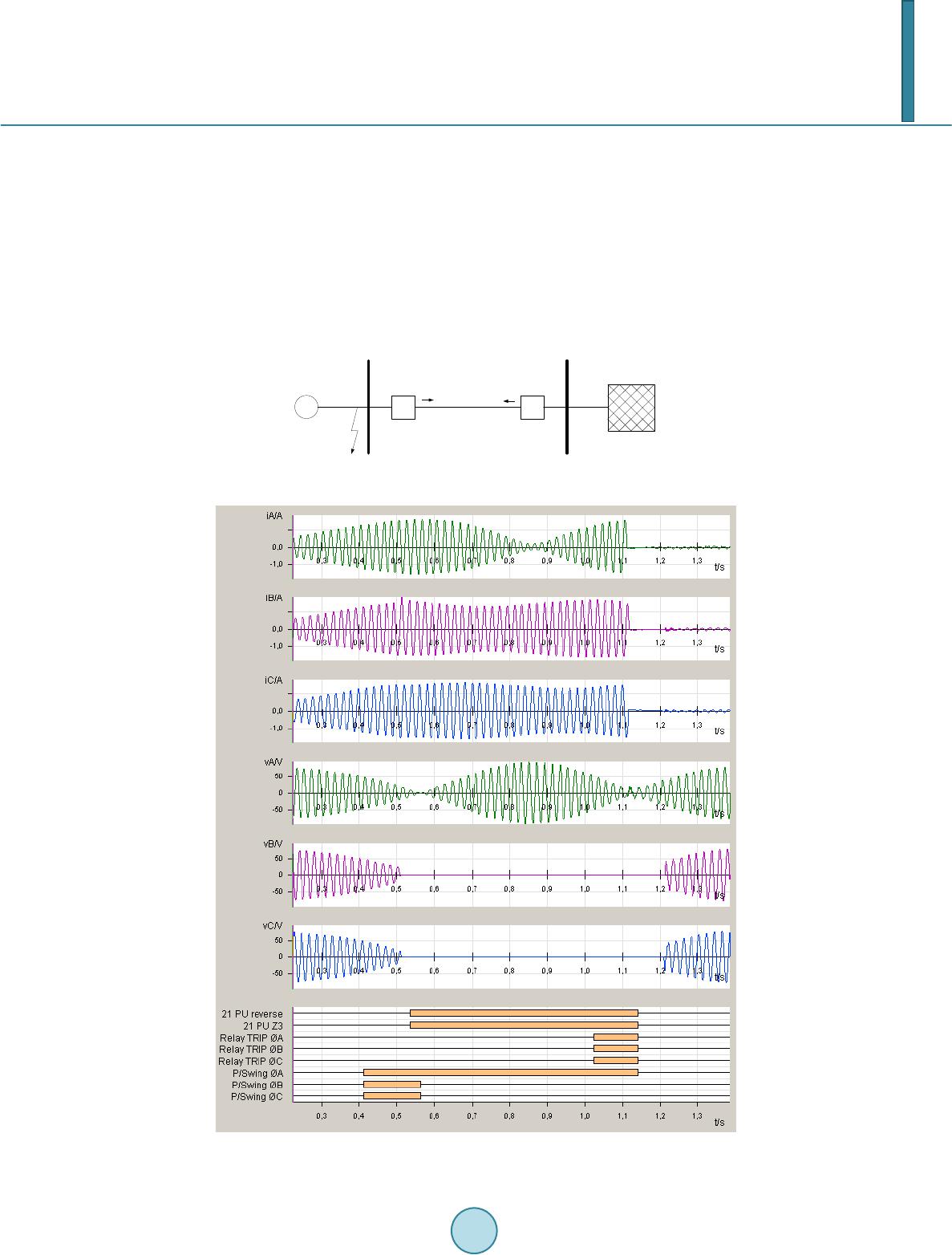
Also the assumption that a power swing is always a symmetrical phenomenon and any asymmetrical current
(or voltage) can be used for releasing the distance protection function is not fulfilled in a complex application. A
proper power swing detection function has to perform also during these conditions.
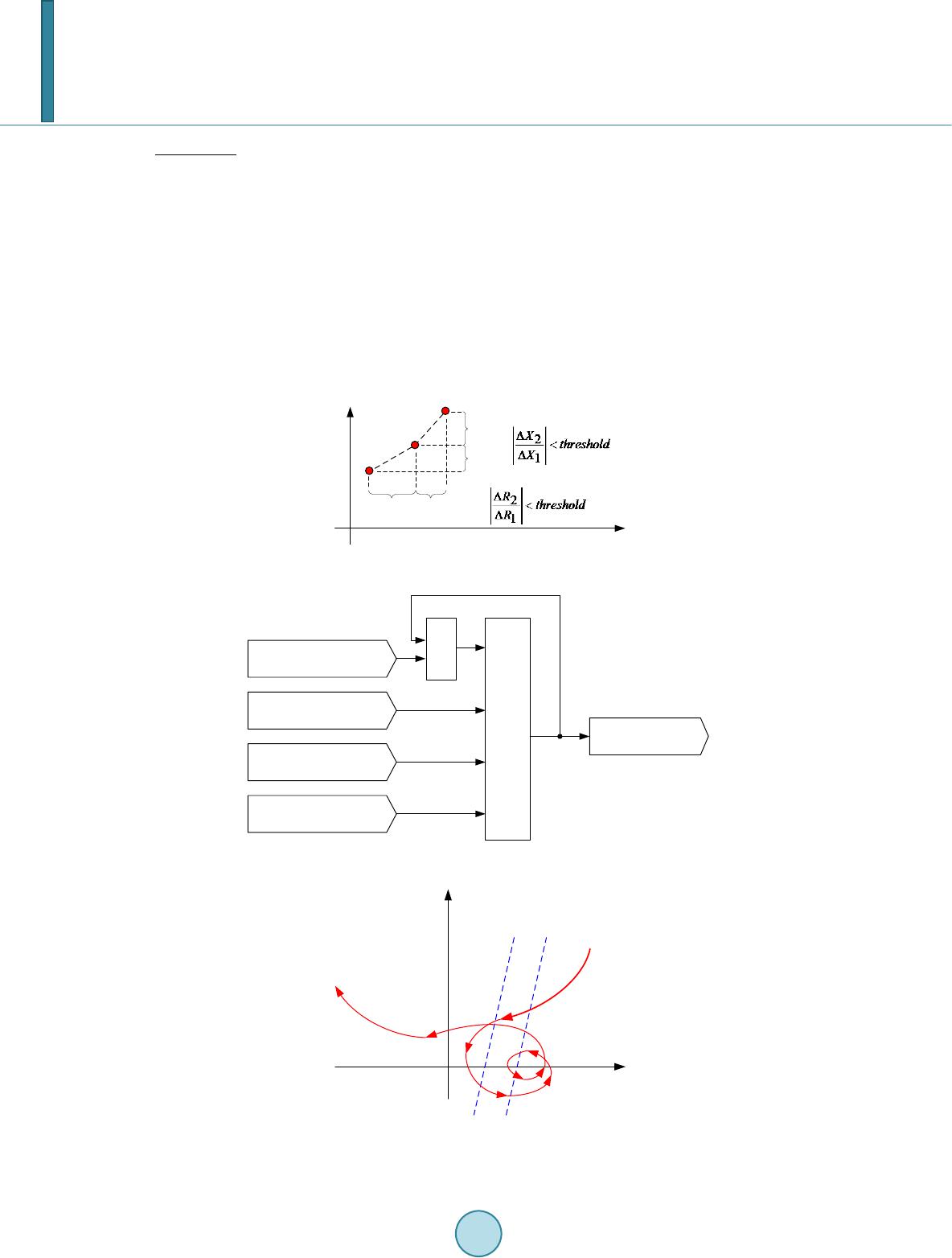
The following method described below solves these problems. It is based on a continuous impedance calcula-
tion [4]. This method has the following features:
No settings are required, thus no complex calculation is needed.
Detection of power swing with frequencies from 0.1 Hz up to 10 Hz.
Detection of power swing that occur during single-pole open condition and during faults.