Paper Menu >>
Journal Menu >>
 Applied Mathematics, 2011, 2, 496-503 doi:10.4236/am.2011.24064 Published Online April 2011 (http://www.SciRP.org/journal/am) Copyright © 2011 SciRes. AM A Modified Discrete-Time Jacobi Waveform Relaxation Iteration Yong Liu1,2, Shulin Wu3 1Departme n t of Instrume n t Science and Engin ee ring, Southeast University, Nanjing, China 2Department of the Aeronautic Instruments and Electronic Engineering, The First Aeronautic Institute of Air Force, Xinyang, China 3School of Science, Sichu an Universi t y of Science and Engineerin g, Zigong, China E-mail: sun_myth@sohu.com, wushulin_ylp@163.com Received November 7, 2010; revised March 11, 201 1; acce p ted M arch 14, 2011 Abstract In this paper, we investigate an accelerated version of the discrete-time Jacobi waveform relaxation iteration method. Based on the well known Chebyshev polynomial theory, we show that significant speed up can be achieved by taking linear combinations of earlier iterates. The convergence and convergence speed of the new iterative method are presented and it is shown that the convergence speed of the new iterative method is sharper than that of the Jacobi method but blunter than that of the optimal SOR method. Moreover, at every iteration the new iterative method needs almost equal co mputation work and memory storage with the Jacobi method, and more importantly it can completely exploit the particular advantages of the Jacobi method in the sense of parallelism. We validate our theoretical conclusions with numerical experiments. Keywords: Discrete-Time Waveform Relaxation, Convergence, Parallel Computation, Chebyshev Polynomial, Jacobi Iteration, Optimal SOR 1. Introduction For very large scale initial value problems (IVPs), linear or nonlinear, the waveform relaxation (WR) iteration, also called dynamic iteration, is a very powerful method and has received much interest from many researchers in the past years, see [1-9] for more details about the history of this method. The difference of the classical iteration methods with the WR iteration method is that the WR method iterates with functions in a func tional sp ace (con- tinuous-time WR), and solve each iteration by some nu- merical method (discrete-time WR), e.g. by the Runge- Kutta methods. In the past years, both the continuous- time WR iteration method and the discrete-time WR ite- ration method have been investigated widely. For exam- ple, one may refer to [1,3,9-13] for the the WR method dis-cussed in continuous time level, and to [9,12, 14-17] for the discrete-time WR method. There are so many ex- cellent results in this field that we can not recount them detaildly. For the linear system of IVPs on arbitrarily long time interval 0,T defined as 00 =,0,, =, ytyt fttT yt y H (1) where 0 , :, , nnnn fyy H , the Jacobi WR iteration can be written as 111 0 d=,0=, =0,1,, d kkkk yyyfy yk t MN (2) where = H MN and M is a pointwise or block- wise diagonal matrix. The discrete-time Jacobi WR ite- ration can be obtained by applying some numerical me- thod, such as BDF method, Runge-Kutta method, etc., to discretize (2) for every iterative index k. In Jacobi waveform relaxation, continuous-time or dis- crete-time, system (2) is decoupled into, say d, loosely coupled subsystems. If, on a parallel computer, these subsystems are assigned to d different processors, and they can be solved on 0,T simultaneously. This ob- vious type of parallelism is present in all waveform re- laxation methods, see, e.g., [1,2-4,9-12,15-19] and re- ferences therein. However, in many cases, such as the Gauss-Seidel, optimal SOR waveform relaxation methods, exploiting this parallelism is only possible when appro- ximations are exchanged between the different proce- ssors as soon as they have been computed (see, e.g., [20]). This leads to a large amount of communication during  Y. LIU ET AL. Copyright © 2011 SciRes. AM 497 each waveform relaxation sweep, which forms a severe drawback. In Jacobi waveform relaxation, communica- tion is only necessary once per sweep, and this method is attractive for parallel implementation. Therefore, we think that any improvement of the con- vergence speed of the Jacobi WR iteration is important. Based on this consideration, in this paper, we attempt to get speed up by taking linear combinations of earlier Ja- cobi iterates, and this leads to the following special ite- rative scheme: 0 1 1 =0 for= 0,1,2, =; for=1,2, , d =; d end =; end k mmm km m m k xy m xt x txtft t yvx MN (3) where the parameters =0 mm v are constant and satisfy =0 =1. m m v (4) Since the discrete-time WR iteration is more favour- able in practical applications, we will devote ourself to getting the speed up of the discrete-time version of ite- rative scheme (3). To solve the ODEs in (3), we first de- compose the time interval 0,T into Ns sub-inter- vals, say 1 ,,=0,1,, 1 nn ttnN s , with equal leng- th h. And then we solve (3) numerically by a linear s -step formula with coefficients =0,1, , , jj j s , which leads to the following iterative scheme written in compact form as 0 0 0 1 =0 =0 1 =0 for= 0,1,2, =,=0,1,,1; =,=0,1,, for=1,2, , =,=0,1,,1 for= 0,1,2,, =; end end =,=0,,; end k jj k nn m jj ss mmm jnjjnjnj nj jj km nsm ns m k yyj s xyn Ns m xyjs nN xhxx f yvxnN MN (5) where the values 0,=0,1,,1 j yj s are the s initial values which are obtained by, for example, the backward Euler method or some other one-step methods. We denote the new iterative scheme (5) by Acc-Jacobi in the remainder of this paper. We will show that the optimal parameters =0 mm v which are used to accelerate the convergence of the original discrete-time Jacobi WR ite- ration relate closely to the coefficients of the -th Che- byshev polynomial. Mor eover, the eff ects of the step size h and the matrices , MN on the convergence speed of the Acc-Jacobi method are also presented. We note that, for the sake of economizing memory storage, formula (5) can be performed in special wise which is independent of the parameter and nearly equals to that of the classi- cal discrete-time Jacobi WR iteration. The remainder of this paper is organized as follows. In Section 2, we recall the definitions of the so-called 1 B H - block matrix and M-matrix, and some related pr o p e r -t i e s. In Section 3, the convergence speed of the discrete-time WR iteration (5) is derived and some comparisons about convergence speed between the Acc-Jacobi, the classical Jac o bi a nd th e o p t imal S O R m ethods are given. In Section 4, we presen t some nume rical re sults which v alidate ou r theo- retical conclusions very well. 2. Some Basic Knowledge of Matrix Throughout this paper, the partial orderings ' , '< and the absolute value in n and nn are inter- preted in componentwise. For a matrix nn A , let qn and ,=1, , i nni q, be some positive inte- gers satisfying =1 = q i inn . Then define the block-wise vector and matrix spaces as follows (see also [11]): 1 1 ==,,,, =|=, ,is existfor=1 ,,. Tn nTT i qqi nn qij qq nn ij ij ii Vx L iq xxxx AAA AA (6) Moreover, for any matrix nn G, let 11 =diag,,,=, GnnGG gg D BDG and 1 =, GGG J DB (7) provided that the quantities 0 ii q, =1,2,,in. Definition 1 ([21]). A real matrix =ij nn a A with 0 ij a for all ij is an M-matrix if A is nonsi- gular and 10 A. Definition 2 ([11, 22]). q LH is an 1 B H -block matrix, if its block comparison matrix H defined by  Y. LIU ET AL. Copyright © 2011 SciRes. AM 498 1 1,=1,,, =,,,=1,,. ii ij ij iq ijij q H HH (8) is an M -matrix, here and hereafter denotes the standard Euclidean norm. Clearly, any M -matrix =ij aA with positive dia- gonal elements is an 1 B H -block matrix. For q LH, we use =qq ij HH to re- present the block absolute value. The block absolute value of a vector q Vx can be defined in a similar way, i.e., 1 =,, . T TT q xx x Definition 3 ([21]). For nn real matrices H , M and N, = H MN is a regular splitting of matrix H , if M is nonsingular with 10 0and MN. Lemma 1 ([11, 22]). Let , , , qq LVLMxy and . Then 1) ]; LM LM L Mxyxyxy 2) ] L MLMMxMx; 3) [] MMxx; 4) MM . Lemma 2 ([11]). Let q LH be an 1 B H -block ma- trix, then 1) isnonsingularH; 2) 1 1 HH ; 3) <1 H J, where 1 = H HH J DB with 11 111 11 ==,, qq diag H HHH JDBDH H and = H H B HD . Lemma 3 ([21]). Let = H MN be a regular split- ting of the matrix H . Then H is nonsingular with 10 H, if and only if 1<1 MN . Lemma 4 ([21]). Let ,nn AB, satisfy 0AB . Then A B. Lemma 5 ([23]). Let nn H , and can be splitted as = H IB , where >0, 0 B, then the follow- ing results are equivalent: 1) 10 H; 2) < B; 3) for =1,2,,in, Re 0 i , where i is the eigenvalue of the matrix. Lemma 6 ([21]). Let 10 H and 112 2 == H MN MN be two regular splittings of H. Then 11 22 11 1> 0 MNMN if 21 0NN ; 11 22 11 1>> >0 MNMN if 21 0NN . 3. Convergence Analysis As supposed in [11], we assume in this paper that the matrix nn H and its splitting = H MN sa- tisfy the following assumption. Assumption (A). Assume that all the off diagonal ele- ments of H are non-positive and H is a symmetric and 1 B H -block matrix; its splitting = H MN satisfies for some integer 1qqn that 11 =diag, , qq MHH is a symmetric positive definite matrix and ,MN are commutative matrices, i.e., =MNNM. Under this assumption, we know that N is also a symmetric matrix. Therefore, the eigenvalues of the pro- duct MN are all real numbers, since for symmetric ma- trices M and N, ,MN are commutative matrices if and only if = T MNMN , see, e.g., [21,23]. We next make an assumption for the linear s-step formula as follows. Assumption (B). Assume that >0 s s , where s and s are the coefficients of the linear s-step formula. Lemma 7. Let matrix H and its splitting = H MN satisfy assumption (A). Then for any real number 0h, h IH is an M -matrix and 1<1h IM N. Proof. Since 11 =diag,, qq MHH is a symmetric positive definite matrix with non-positive off diagonal elements, by the conclusions 1, 3 of lemma 5 and the results given in [11], we know that for any 0h it holds 11 1 0and.hh IMIMM Clearly, the inequality 11 h IMM implies 11 0h H IH D D. Thus, by definition 3, =hh h I HIH IH DB is a regular splitting of matrix hIH and 11 hh H H IH IH D BDB, since =0 h H IH BB, where the definition of the matrices H D and H B has been given in lemma 2. Then it follows from lemma 4 and the conclusion 3 of lemma 2 that 11 <1. hh HH IH IH DBDB (9) Moreover, by definition 2 and the notations given in lemma 2, it is clear that =0 h IH NB , =h h I H IM D and the matrix hIM is an 1 B H - block matrix, since 11 =diag,, qq MHH is a sym-  Y. LIU ET AL. Copyright © 2011 SciRes. AM 499 metric positive definite matrix. Therefore, we have 11 1 1 =<1, hh hh h IH IH IM NIMN IM N DB (10) where in the first, second and the last inequalities we have used the conclusions 2, 4 of lemma 1, the con- clusion 2 of lemma 2 and (9), respectively. Finally, from (10) we know that = h hIHIMN is a regular splitting of matrix hIH which satisfies 1<1h IH N. Hence, according to lemma 3, it is easy to know that hIH is an M-matrix. □ Lemma 8 Let matrix H and its splitting = H MN satisfy assumption (A). Then for any real number r, all the eigenvalues of matrix 1 r IM N are real numbers. Proof. In assumption (A), we have mentioned that the matrices M and N are commutative. Therefore, by the results in [21,23], we know that there exists a non- singular matrix, say Q, such that 11 11 =diag, ,and =diag,,, MM n NN n QMQ QNQ where =1 n M ii and =1 n N ii are the real eigenvalues of matrices M and N, respectively. Thus, for any real nu mber r, it is obvious that the n eigenvalues of the matrix 1 r IM N are =1 n N iM ii r , which are real numbers. □ Now, we turn our attention to the convergence analysis of the Acc-Jacobi method defined by (5). We denote the convergent solution of the Acc-Jacobi method by , j y =0,1, ,jNs with 0 = j j yy for =0,1, ,1js . We thus define the notations as Equation (11) shows. Therefore, by careful routine calculations we can equivalently rewritten the Acc-Jacobi iteration (5) as 1 11 1 ==, m mk mm X MNXMfrMN Yc (12) where 111 =0 =j m mj cMNMfr with 0 1= MN I . This implies the following relation bet- ween 1k Y and k Y as 11 =0 =0 =. m kk mmm mm vv YMNYc (13) Hence, it follows from the convergence theory of Ja- cobi iteration [21,23] that the vector k Y generated by (13) converges to some value, say Y for example, if and only if it holds that 11 =0 =0 =<1. mm mmss mm vv MNN (14) Therefore, we arrive at the following question: how to select parameters =0 mm v which minimize the argu- ment 1 =0 m mss mv N, and this leads to following minimum problem =1 01 =0 min , m m vv vm vC (15a) 11 12 00 0 000 =0 =0 1 =0 =0=0 =,,, ,=,,, , =0,1,,,and =0,1,, =,,,,0,,0 =,,, TT TT TTT T mmmm kkkk ssNss sNs T ss TT T jjj jjj jj ss s TT jjj jjNj jj j mk hhyhhyhhy hfhf hf Xxxx Yyyy rIH IHIH f 11 01 01 01 01 ,=, =,=0,1,,, =,= 00 00 00 T Tiii i i ss ss ss ss ss ss hhis IMN N N NN MN NNN N NN N (11)  Y. LIU ET AL. Copyright © 2011 SciRes. AM 500 here and herea fte r we set 1 = s s C N (15b) for convenience. Definition 4 Let S be the set of all polynomials px of degree with 1=1p . By this definition, we can rewrite problem (15) as min . pS pC (16) It is very difficult to solve problem (17) exactly. However, if we have =C at hand, we may con- sider the following problem min max. pS xpx (17) Clearly, minmin max. pSpS x pC px (18) The max-min problem (18) is classical and has been investigated deeply by the famous mathematician Pafnuty Chebyshev (182 1-1894), see, e.g., [24]. The solution of this problem can be obtained by the so called Cheb yshev polynomial Ux which is defined as follows. Definition 5 ( [21,24]) 1 1 cos,if 11, cos =cosh,if >1, cosh xx Ux xx (19) where 1 is an integer. The following two lemmas about the fun ction Ux are useful to our subsequent analysis. Lemma 9 ([21,24]) The polynomial Ux defined in (20) satisfies the three-term recursion relation as 11 01 =2 , with=1 and =. Ux xUxUx UxUx x (20) Lemma 10 The function 11 1Ux for 0,1x is strictly monotone increasing. Proof. Define 2 =11 x gx x and 2 2 =1 x fx x , 0< <1x. Then routine computation shows that 2 2 222 1 =>0 11 111 x gx xxx and 12 2 2 21 =>0 1 xx fx y for 0< <1x and 1 . This implies that fgx is a strictly monotone increasing function for 0<<1x and 1 . Therefore, we complete the proof by noting that 1= 1fgx Ux for 0<<1x.□ With the Ch ebyshev polynomial Ux , we have the following conclusion for the max-min probl em (18). Theorem 1 ([21]) The polynomial ()= , 1 Ux px U (21) is the unique polynomial which solves problem (18). We note that the coefficients of the polynomial p can be computed conveniently by the three-term recur- sion relation given by (21). Next, we focus on deriving the spectral radius of the matrix =0 m m mvC , when =0 mm v are the coefficients of the polynomial p defined by (22). Let =1 n ii be the n eigenvalues of the matrix C (the matrix C is defined by (16)), and by lemma 8 we know that they are all real numbers. Therefore, it holds that 1 =0 1 ==max () =max, 1 m mi in m i in vCp Cp U U (22) where =C . Then it follows, by noting that 1=1U and there must exist so me =1 n ii such that =1C , that 1 =0 ==max 1 1 =. 1 i m min m U vCp CU U (23) Now, by assumptions (A) and (B), and lemma 7, we know that 1 1 == =<1. s ss s CN IMN h (24) Then by the definition of Ux given in (24), routine computation yields 2 =0 21 1 == , 111 m m m vC U (25) where 2 22 2 ==1 . 11 11 (26)  Y. LIU ET AL. Copyright © 2011 SciRes. AM 501 We next compare the convergence speed of the Acc- Jacobi method with the classical Jacobi iteration and the optimal SOR iteration. To this end, we first review the discrete-time Jacobi WR iteration and the discrete-time optimal SOR WR iteration investigated in [17,12] and [25,3,4], respectively. For simplicity, at the moment we just introduce the continuous-time Jacobi and SOR WR iterations, and the discrete-time version can be obtained straightforwardly by applying the linear s -step formula. The Jacobi WR iteration can be written as 11 d= d kkk yyyf t MN; (27) where = H MN and M is a point or block dia- gonal matrix. Clearly, the Jacobi WR iteration (28) can be equivalently written as 0 1 1 =, d=, =0,1,,, d =. k mmm k xy xxxfm t yx MN (28) Analogously, the optimal SOR WR iteration can be written as follows: 0 1 1 =, d=, =0,1,,, d =, k mmm k xy xxxfm t yx MN (29) where 11 =, = MMLN MU with the argument been defined by (27), and = H MUL. The matrix M is the point or block diagonal matrix of H just as mentioned in the Jacobi WR iteration (29) and L , U are the strictly lower and upper triangle ma- trices of the matrix MH, respectively. Similar to our above analysis, it is easy to know that the convergence speed of the discrete-time Jacobi iter- ation (after applying the linear s-step formula to (29)) and the discrete-time optimal SOR WR iteration (after applying the linear s-step formula to (30)) can be spe- cified as 2 2 =and =, 11 Jac SOR (30) respectively, where =C and 1 =s s Ch IM N. For more details, see [25,12]. Let 2 =0 21 1 ===, 111 m Che m m vC U (31) where =0 mm v are the coefficients of the -th Che- byshev polynomial given by (20) and is define by (27). In Figure 1, we plot the curves of the , Che Jac and SOR as functions of =C for 0,1 and =4,8,11 . One can see clearly from these four panels that the convergence speed of the Acc-Jacobi WR iteration me- thod is sharper than that of the classical Jacobi WR iteration, while blunter th an that of the optimal SOR me- thod. Moreover, as the argument becomes larger, the spectral radiuses of the Acc-Jacobi and the optimal SOR methods become nearer. 4. Numerical Results To validate our theoretical results given in Section 3, we consider the following problem: 0 =,0,, 0= , f ytytfttt yy H (32) where =1,2, ,100 =sin 1 T j j ftt j , 0=1,1, ,1 T y (33) and 100 100 H is defi ned by =, 10025 00 25 100250 with =02510025 0025 100 28.375 100 128.37510 and =. 0128.375 1 001 28.375 AB BA HB BA A B (34) One can verify that the eigenvalue of the matrix H defined by (34) changes from 4 410 to 194, and thus system (33) is really stiff. To perform the discrete-time WR iteration, we choose the backward Euler method with step size =0.02h. Throughout all of our experiments, we choose =5 and = 250N, where = f t Nh is the total steps when the time interval 0, f t is discretized by step size h.We note that the discrete-time optimal SOR WR iteration is a typical sequential algorithm, and therefore we only focus on comparing the convergence speed of the Acc-Jacob i WR iteration defined by (5) and 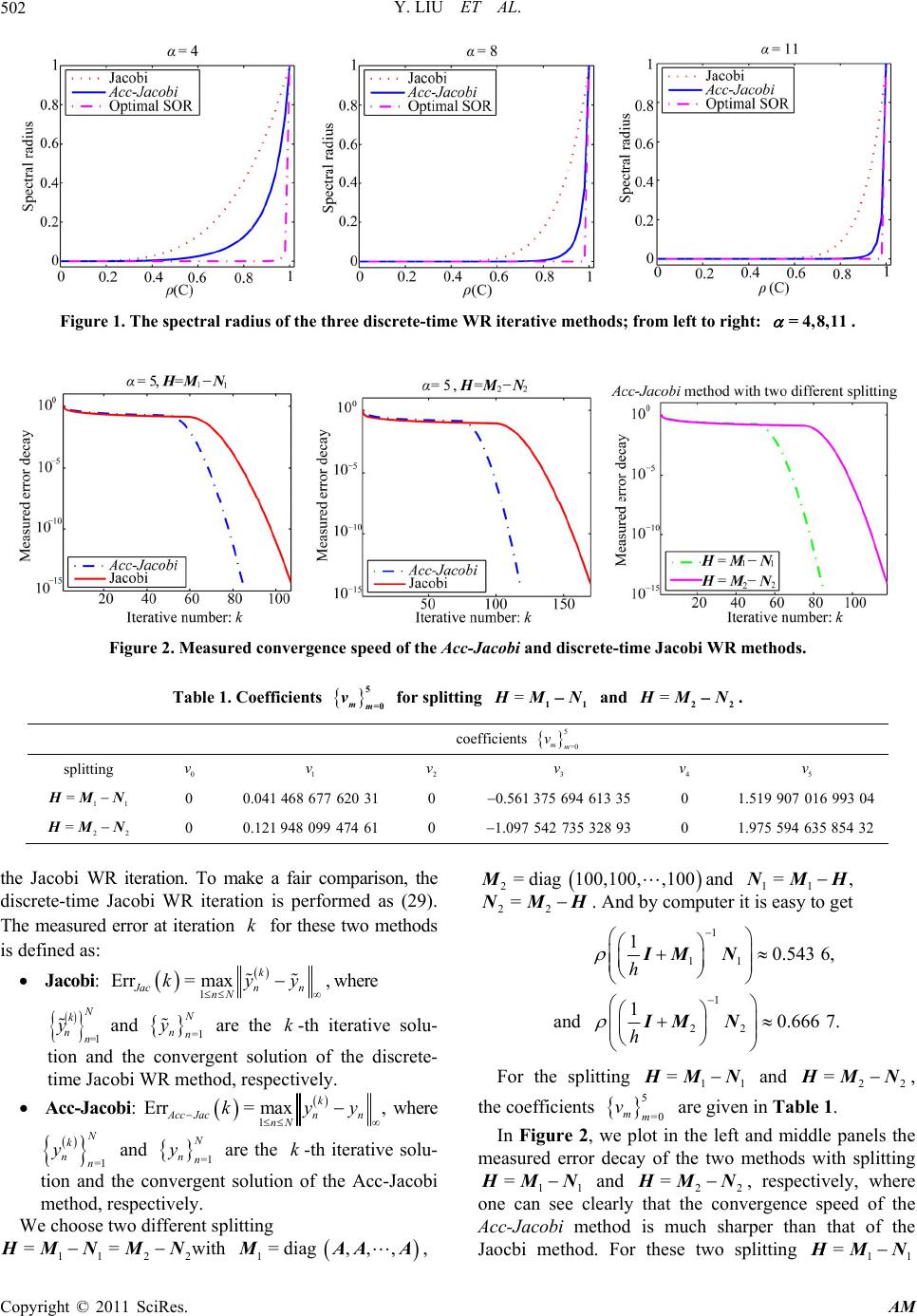 Y. LIU ET AL. Copyright © 2011 SciRes. AM 502 Figure 1. The spectral radius of the three discrete-time WR iterative methods; from left to right: =4,8,11 . Figure 2. Measured convergence speed of the Acc-Jacobi and discrete-time Jacobi WR methods. Table 1. Coefficients 5 =0 mm v for splitting =11 HM N and =22 HM N. coefficients 5 =0 mm v splitting 0 v 1 v 2 v 3 v 4 v 5 v 11 =HMN 0 0.041 468 677 620 310 0.561 375 694 613 35 0 1.519 907 016 993 04 22 =HM N 0 0.121 948 099 474 610 1.097 542 735 328 93 0 1.975 594 635 854 32 the Jacobi WR iteration. To make a fair comparison, the discrete-time Jacobi WR iteration is performed as (29). The measured error at iteration k for these two methods is defined as: Jacobi: 1 Err= maxk Jacn n nN kyy , where =1 N k nn y and =1 N nn y are the k-th iterative solu- tion and the convergent solution of the discrete- time Jacobi WR method, respectively. Acc-Jacobi: 1 Err= maxk Acc Jacnn nN kyy , where =1 N k nn y and =1 N nn y are the k-th iterative solu- tion and the convergent solution of the Acc-Jacobi method, respectively. We choose two different splitting 112 2 == H MN MNwith 1=diag ,,,MAAA, 2=diag 100,100,,100Mand 11 =,NMH 22 = NMH. And by computer it is easy to get 1 11 1 22 10.543 6, 1 and 0.666 7. h h IM N IM N For the splitting 11 = H MN and 22 = H MN, the coefficients 5 =0 mm v are given in Table 1. In Figure 2, we plot in the left and middle panels the measured error decay of the two methods with splitting 11 = H MN and 22 = H MN, respectively, where one can see clearly that the convergence speed of the Acc-Jacobi method is much sharper than that of the Jaocbi method. For these two splitting 11 = H MN 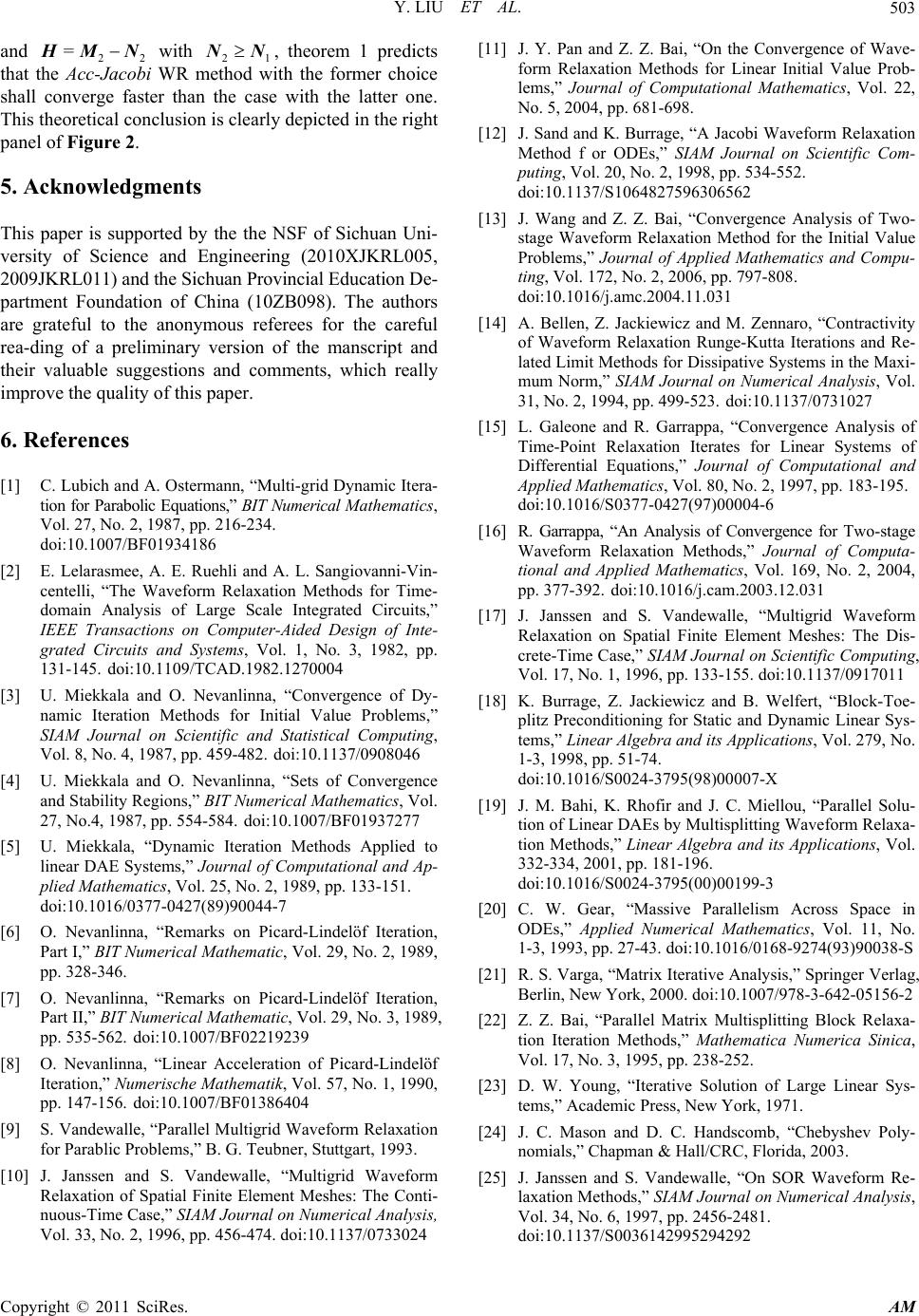 Y. LIU ET AL. Copyright © 2011 SciRes. AM 503 and 22 = H MN with 21 NN, theorem 1 predicts that the Acc-Jacobi WR method with the former choice shall converge faster than the case with the latter one. This theoretical conclusion is clearly depicted in the right panel of Figure 2. 5. Acknowledgments This paper is supported by the the NSF of Sichuan Uni- versity of Science and Engineering (2010XJKRL005, 2009JKRL011) and t he Si chu an Pro vi ncial Educat i on De- partment Foundation of China (10ZB098). The authors are grateful to the anonymous referees for the careful rea-ding of a preliminary version of the manscript and their valuable suggestions and comments, which really improve the quality of this paper. 6. References [1] C. Lubich and A. Ostermann, “Multi-grid Dynamic Itera- tion for Pa rabolic Equations,” BIT Numerical Mathematics, Vol. 27, No. 2, 1987, pp. 216-234. doi:10.1007/BF01934186 [2] E. Lelarasmee, A. E. Ruehli and A. L. Sangiovanni-Vin- centelli, “The Waveform Relaxation Methods for Time- domain Analysis of Large Scale Integrated Circuits,” IEEE Transactions on Computer-Aided Design of Inte- grated Circuits and Systems, Vol. 1, No. 3, 1982, pp. 131-145. doi:10.1109/TCAD.1982.1270004 [3] U. Miekkala and O. Nevanlinna, “Convergence of Dy- namic Iteration Methods for Initial Value Problems,” SIAM Journal on Scientific and Statistical Computing, Vol. 8, No. 4, 1987, pp. 459-482. doi:10.1137/0908046 [4] U. Miekkala and O. Nevanlinna, “Sets of Convergence and Stability Regions,” BIT Numerical Mathematics, Vol. 27, No.4, 1987, pp. 554-584. doi:10.1007/BF01937277 [5] U. Miekkala, “Dynamic Iteration Methods Applied to linear DAE Systems,” Journal of Computational and Ap- plied Mathematics, Vol. 25, No. 2, 1989, pp. 133-151. doi:10.1016/0377-0427(89)90044-7 [6] O. Nevanlinna, “Remarks on Picard-Lindelöf Iteration, Part I,” BIT Numerical Mathematic, Vol. 29, No. 2, 1989, pp. 328-346. [7] O. Nevanlinna, “Remarks on Picard-Lindelöf Iteration, Part II,” BIT Numerical Mathematic, Vol. 29, No. 3, 1989, pp. 535-562. doi:10.1007/BF02219239 [8] O. Nevanlinna, “Linear Acceleration of Picard-Lindelöf Iteration,” Numerische Mathematik, Vol. 57, No. 1, 1990, pp. 147-156. doi:10.1007/BF01386404 [9] S. Vandewalle, “Parallel Multigrid Waveform Relaxation for Parablic Problems,” B. G. Teubner, Stuttgart, 1993. [10] J. Janssen and S. Vandewalle, “Multigrid Waveform Relaxation of Spatial Finite Element Meshes: The Conti- nuous-Time Case,” SIAM Journal on Numerical Analysis, Vol. 33, No. 2, 1996, pp. 456-474. doi:10.1137/0733024 [11] J. Y. Pan and Z. Z. Bai, “On the Convergence of Wave- form Relaxation Methods for Linear Initial Value Prob- lems,” Journal of Computational Mathematics, Vol. 22, No. 5, 2004, pp. 681-698. [12] J. Sand and K. Burrage, “A Jacobi Waveform Relaxation Method f or ODEs,” SIAM Journal on Scientific Com- puting, Vol. 20, No. 2, 1998, pp. 534-552. doi:10.1137/S1064827596306562 [13] J. Wang and Z. Z. Bai, “Convergence Analysis of Two- stage Waveform Relaxation Method for the Initial Value Problems,” Journal of Applied Mathematics and Compu- ting, Vol. 172, No. 2, 2006, pp. 797-808. doi:10.1016/j.amc.2004.11.031 [14] A. Bellen, Z. Jackiewicz and M. Zennaro, “Contractivity of Waveform Relaxation Runge-Kutta Iterations and Re- lated Limit Methods for Dissipative Systems in the Maxi- mum Norm,” SIAM Journal on Numerical Analysis, Vol. 31, No. 2, 1994, pp. 499-523. doi:10.1137/0731027 [15] L. Galeone and R. Garrappa, “Convergence Analysis of Time-Point Relaxation Iterates for Linear Systems of Differential Equations,” Journal of Computational and Applied Mathematics, Vol. 80, No. 2, 1997, pp. 183-195. doi:10.1016/S0377-0427(97)00004-6 [16] R. Garrappa, “An Analysis of Convergence for Two-stage Waveform Relaxation Methods,” Journal of Computa- tional and Applied Mathematics, Vol. 169, No. 2, 2004, pp. 377-392. doi:10.1016/j.cam.2003.12.031 [17] J. Janssen and S. Vandewalle, “Multigrid Waveform Relaxation on Spatial Finite Element Meshes: The Dis- crete-Time Case,” SIAM Journal on Scientific Computing, Vol. 17, No. 1, 1996, pp. 133-155. doi:10.1137/0917011 [18] K. Burrage, Z. Jackiewicz and B. Welfert, “Block-Toe- plitz Preconditioning for Static and Dynamic Linear Sys- tems,” Linear Algebra and its Applications, Vol. 279, No. 1-3, 1998, pp. 51-74. doi:10.1016/S0024-3795(98)00007-X [19] J. M. Bahi, K. Rhofir and J. C. Miellou, “Parallel Solu- tion of Linear DAEs by Multisplitting Waveform Relaxa- tion Methods,” Linear Algebra and its Applications, Vol. 332-334, 2001, pp. 181-196. doi:10.1016/S0024-3795(00)00199-3 [20] C. W. Gear, “Massive Parallelism Across Space in ODEs,” Applied Numerical Mathematics, Vol. 11, No. 1-3, 1993, pp. 27-43. doi:10.1016/0168-9274(93)90038-S [21] R. S. Varga, “Matrix Iterative Analysis,” Springer Verlag, Berlin, New York, 2000. doi:10.1007/978-3-642-05156-2 [22] Z. Z. Bai, “Parallel Matrix Multisplitting Block Relaxa- tion Iteration Methods,” Mathematica Numerica Sinica, Vol. 17, No. 3, 1995, pp. 238-252. [23] D. W. Young, “Iterative Solution of Large Linear Sys- tems,” Academic Press, New York, 1971. [24] J. C. Mason and D. C. Handscomb, “Chebyshev Poly- nomials,” Chapman & Hall/CRC, Florida, 2003. [25] J. Janssen and S. Vandewalle, “On SOR Waveform Re- laxation Methods,” SIAM Journal on Numerical Analysis, Vol. 34, No. 6, 1997, pp. 2456-2481. doi:10.1137/S0036142995294292 |