J. Huang et al.
i
b
i
c
i
a
50.0k
40.0k
i
a
i
b
i
c
(A)
30.0k
20.0k
10.0k
0.0
-10.0k
-20.0k
-30.0k
t(s) 0.958 0.960 0.962 0.964 0.9660.968 0.970 0.972
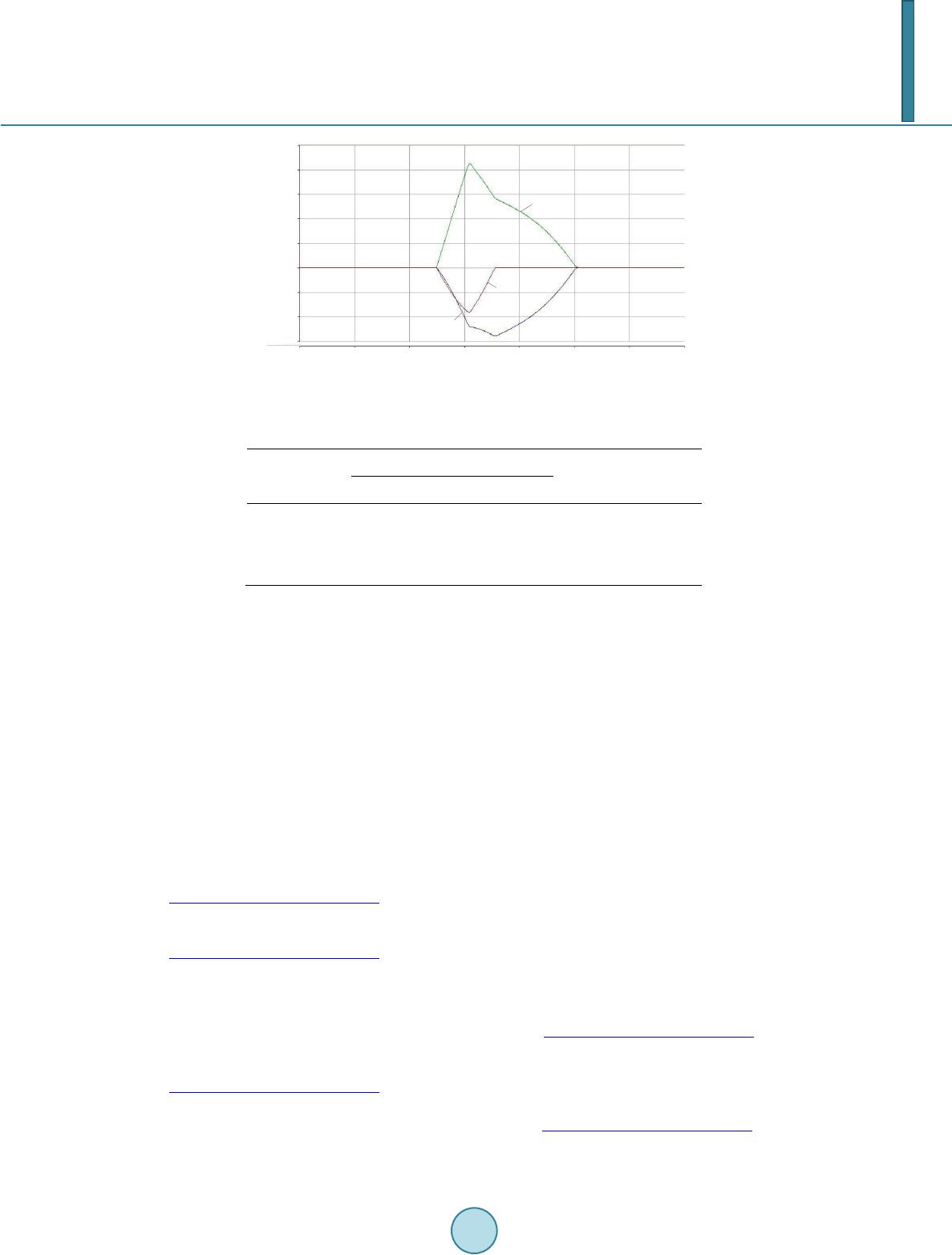
Figure 9. Three phase current waveforms of the short circuit current breaking
simulation for the MCCB.
Table 2. Comparison of simulation results with experiment.
Short circuit
characteristic
Short circuit current peak value (kA) Duration of
short-circuit Arc
duration
(ip)a (ip)b (ip)c
Experiment 25.8 35.7 18.2 5.93 4.72
Simulatioin 25.2 38.8 17.1 5.42 4.32
Relative error 2.3 8.7 6.0 8.6 8.5
PSCAD/EMTDC. The relative errors between simulation and experiment measurement are less than 9% which
demonstrate that the model is accurate enough to describe the dynamic behavior and protection feature of the
MCCB. The simulation model for MCCB can be directly used in the simulation program based on PSCAD/
EMTDC. So simulation programs for different shipboard power systems which contain multiple machines,
complex distribution network and multiple circuit breakers can be built. It will be useful to evaluate the protec-
tion performance of the power system by short-circuit interruption simulations which can then be optimized by
adjusting protection parameters setting of circuit breakers.
Acknowledgements
This work was supported by the National Natural Science Foundation of China (NSFC) under Grant 51207165.
References
[1] Kawase, Y., Mori, H. and Ito, S. (1997) 3-D Element Analysis of Electrodyanmic Repulsion Forces in Stationary Elec-
tric Contacts Taking into Account Asymmetric Shape. IEEE Transactions on Magnetics, 33, 1994-1999.
http://dx.doi.org/10.1109/20.582692
[2] Tto, S. and Takato, Y. (1998) Numerical Analysis of Electromagnetic Forces in Low Voltage AC Circuit Breakers Us-
ing 3-D Finite Element Method Taking into Account Eddy Currents. IEEE Transactions on Magnetics, 34, 2597-2600.
http://dx.doi.org/10.1109/20.717600
[3] Stammberger, H. (1998) Force Calculation for the Movable Contact of Circuit Breakers. Proceedings of the 19th In-
ternational Conference on Electric Contact Phenomena, Nuremberg, 14-17.
[4] Atienza, E., Perrault, M. and Wurtz, F. (2000) A Methodology for the Sizing and the Optimization of An Electro mag-
netic Release. IEEE Transactions on Magnetics, 36, 1659-1663. http://dx.doi.org/10.1109/20.877761
[5] Bizjak, G., Zunko, P. and Povh, D. (1995) Circuit Breaker Model for Digital Simulation Based on Mayr’s and Cassie’s
Differential Arc Equations. IEEE Transactions on Power Delivery, 10, 1310-1315.
http://dx.doi.org/10.1109/61.400910
[6] Schavemaker, P.H. and van der Sluis, L. (2000) An Improved Mayr Type Arc Model Based on Current-Zero Mea-
surements. IEEE Transactions on Power Delivery, 15, 580-584. http://dx.doi.org/10.1109/61.852988
[7] Rong, M.Z., Yang, F., Wu, Y., Murphy, A.B., Wang, W.Z. and Guo, J. (2010) Simulation of Arc Characteristics in