Y. S. Qudaih et al.
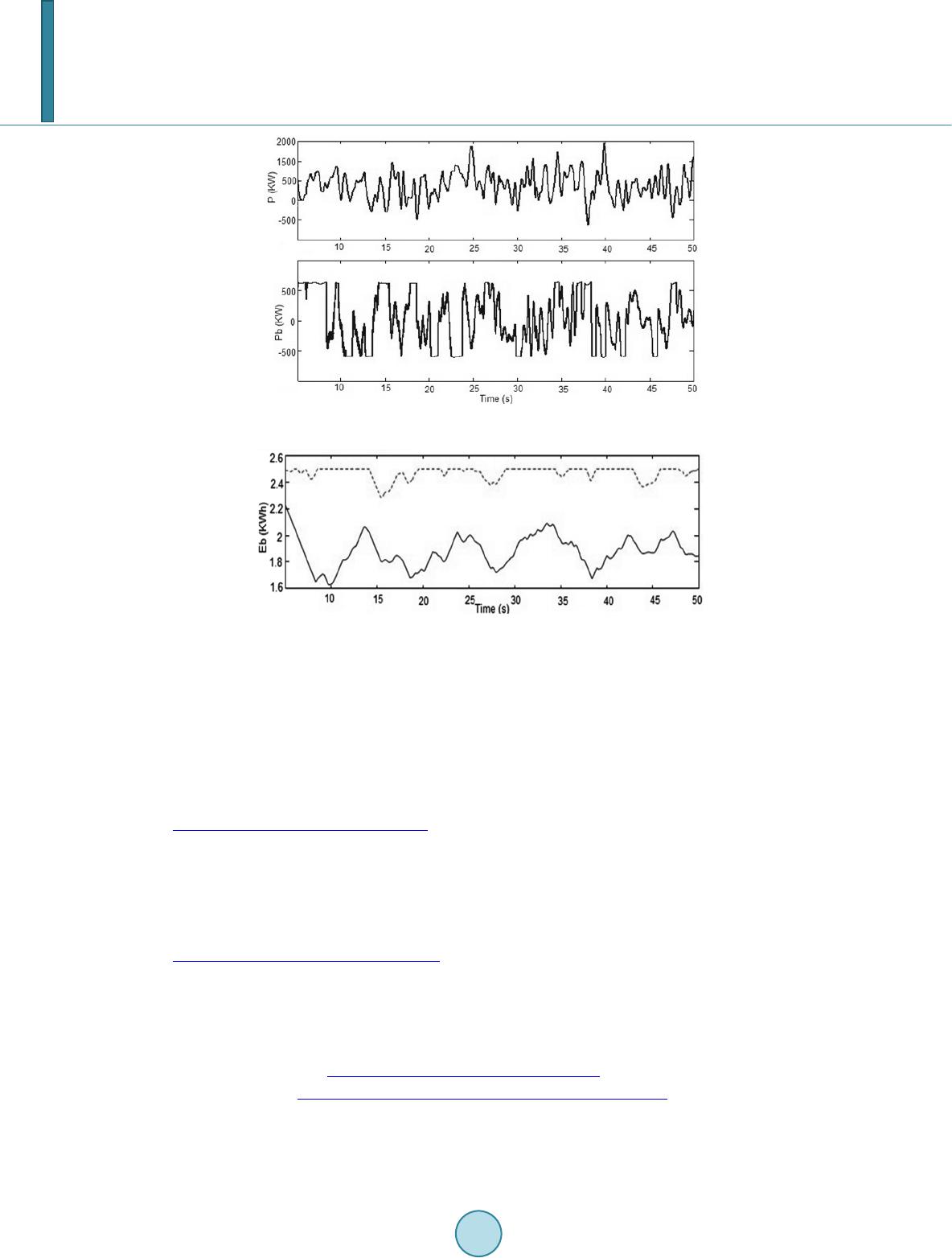
Figure 9 . Real power fluctuations of the system and batrries power.
Figure 10. Energy stored trajectory of the storage system (Dashed line: Using
PID controller. Continuous Line: Using fuzzy controller).
balance the generation and demand keeping stable frequency with the best usage of the storage system. Future
work aims to find more intelligent applications in mocrogrids considering wind turbines and other renewable
sources and storage systems such as fuel cells.
References
[1] González, J.S., Payán, M.B., Santo s, J.M.R. and González-Longatt, F. (2014) A Review and Recent Developments in
the Optimal Wind-Turbine Micro-Siting Problem. Renewable and Sustainable Energy Reviews, 30, 133-144.
http://dx.doi.org/10.1016/j.rser.2013.09.027
[2] Bernard, M.Z., Mohamed, T. H., Ali, R., Mitani, Y. and Qudaih, Y.S. (2013) PI-MPC Frequency Control of Power
System in the Presence of DFIG Wind Turbines. Engin eeri ng, 5, 43-50.
[3] Caia, D.W.H. , Adlakhab, S., Lowc, S.H., De Martinid, P. and Mani Chandyc, K. (2013) Impact of Residential PV
Adoption on Retail Electricity Rates. 62, 830-843.
[4] Qudaih, Y.S., Elbaset, A.A. and Hiyama, T. (2010) Simulation Studies on ECS Application in a Clean Power Distribu-
tion System. International Journal of Electrical Power and Energy Systems, 33, 43-54.
http://dx.doi.org/10.1016/j.ijepes.2010.08.005
[5] Zhang, L.F., Gari, N. and Hmurcik, L.V. (2014) Energy Management in a Microgrid with Distributed Energy Re-
sources . 78, 297-30 5 .
[6] Saxen a, D., S in gh, S.N. and Verma, K.S. (2010) Application of Computational Intelligence in Emerging Power Sys-
tems. International Journal of Engineering, Science and Technology, 2, 1-7.
[7] Qudaih, Y.S. and Mitani, Y. (2011) Power Distribution System Planning for Smart Grid Applications Using ANN.
Energy Procedia, 12, 3-9. http://dx.doi.org/10.1016/j.egypro.2011.10.003
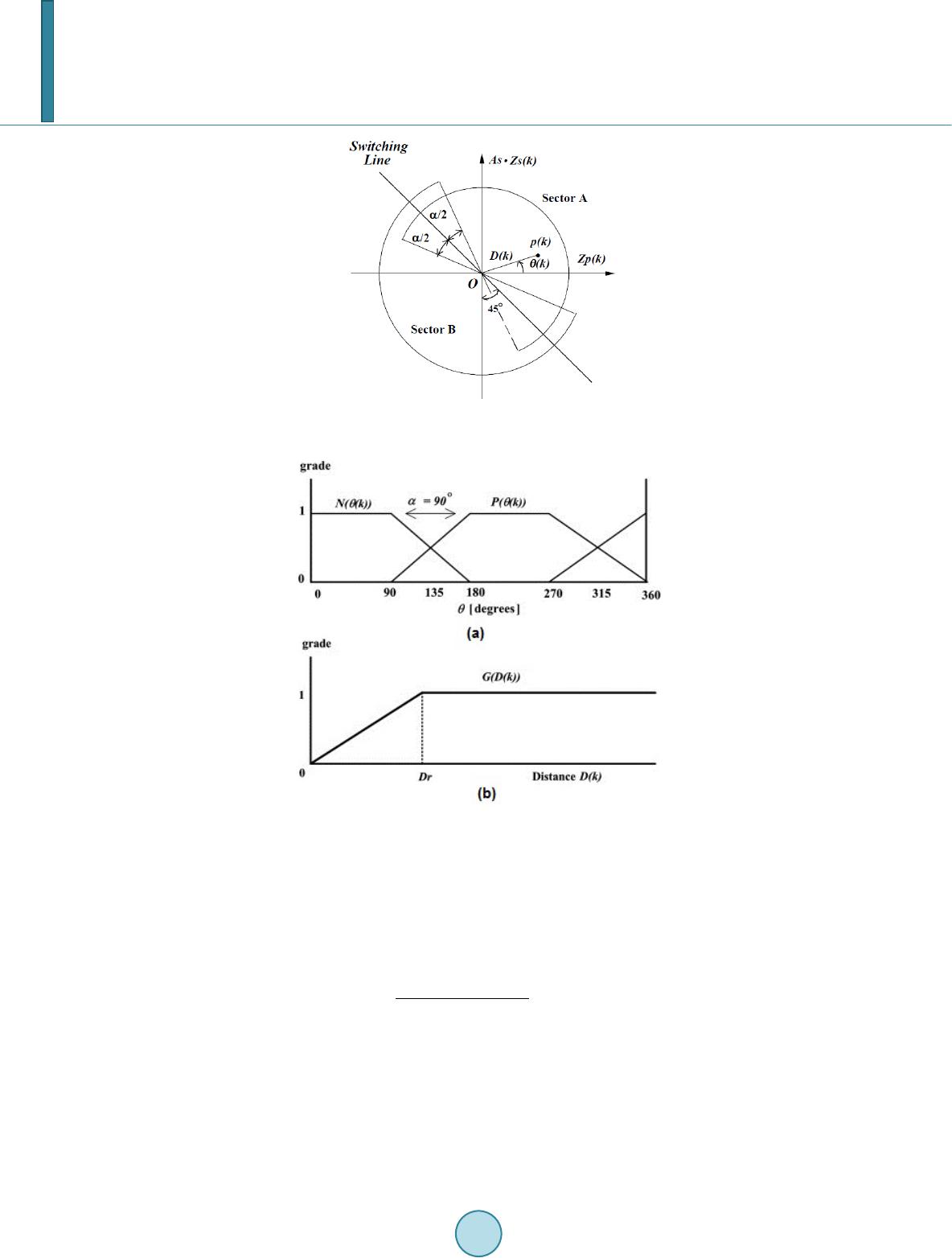
[8] Kaehl er, S.D. (2013) http://www.seattlerobotics.org/encoder/mar98/fuz/fl_part1.html
[9] Hal mann, M.M. and Steinberg, M. (1999 ) Green House Gas Carbon Dioxide Mitigation. CRC Press.
[10] Hiyama, T. (1998) Fuzzy Logic Power System Stabilizer Using Polar Information. In: El-Hawary, M.E., Ed., Electric
Power Applications of Fuzzy Systems, IEEE Press, New York, 149-177.