Paper Menu >>
Journal Menu >>
 Applied Mathematics, 2011, 2, 383-388 doi:10.4236/am.2011.23046 Published Online March 2011 (http://www.SciRP.org/journal/am) Copyright © 2011 SciRes. AM Semi-Markovian Model of Control of Restorable System with Latent Failures Yuriy E. Obzherin, Aleksey I. Peschansky, Yelena G. Boyko Sevastopol National Technical University, Sevastopol, Ukraine E-mail: vmsevntu@mail.ru Received December 2, 2010; revised January 31, 2011; accepted February 3, 2011 Abstract Mathematical model of control of restorable system with latent failures has been built. Failures are assumed to be detected after control execution only. Stationary characteristics of system operation reliability and effi- ciency have been defined. The problem of control execution periodicity optimization has been solved. The model of control has been built by means of apparatus of semi-Markovian processes with a discrete-contin- uous field of states. Keywords: Control, Latent Failure, Semi-Markovian Process, System Stationary Characteristics 1. Introduction An important factor providing reliability, high quality, and efficiency of modern technological complexes is the presence of control systems in them. The review of the results concerning model building of control systems can be found in [1,2]. Some mathematical models of control systems are represented in [3,4]. In the present article the model of control execution and restoration of a single-unit system with latent fail- ures has been investigated. The latent failure is the one that does not show up till th e control is executed. Defec- tive goods are produced up to the failure detection. The problems of technological complexes’ control are closely connected with their maintenance. In the work [5] maintenance models were built by means of semi-Mar- kovian processes with a common phase field of states [6]. In the present article this apparatus is used to build the model of control under the cond ition of latent failures oc- currence. In the second section of the article the system opera- tion is described, its semi-Markovian model is built. Be- sides, stationary distribution of embedded Markovian chain is given. In the third sectio n main stationary chara- cteristics of the system operation reliability and efficien- cy are defined. These are: mean stationary operation time, mean stationary restoration time, availability function, mean income and expenses per time unit. In the fourth section the problem of control execution periodicity op- timization is solved. 2. The Problem Definition and Mathematical Model Building Let us investigate the system operating in the following way. At the time zero the system begins operating, and the control is on. System failure-free operation time is a random value (RV) with distribution function (DF) F tP t and distribution density (DD) f t. The control is executed in random time with DF Rt Pt and DD rt. The failure is detected only when control is carried out. Control duration is RV with DF Vt Pt and DD vt. After fail- ure detection system restoration begins immediately and the control is deactivated. System restoration time is RV with DF Gt Pt and DD g t. After the system restoration all its properties are completely res- tored. All the RV are supposed to be independent, have finite assembly averages and variances. Time diagram of the system operation and the system transition graph are shown in Figure 1 and Figure 2 respectively. The purpose of the present article is to find stationary reliability and economical characteristics of the single- unit restorable system with regard to control under the condition of latent failures occurren ce, and to define con- trol execution optimal periodicity. To describe the system operation let us use semi-Mar- kovian process t with the following field of states: 111211210101200 100201E,x,x, x,,x,. The meaning of state codes is the following: 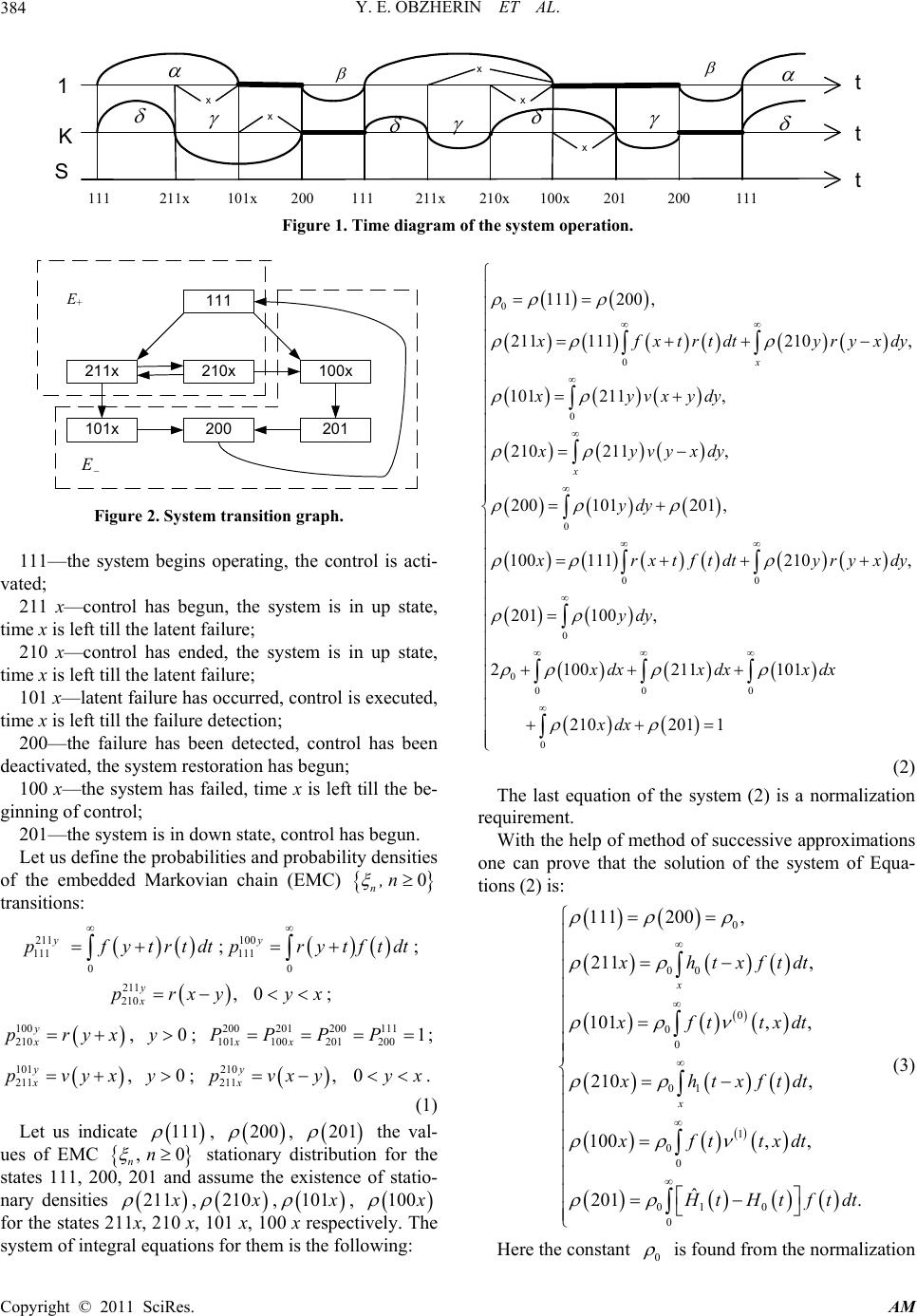 Y. E. OBZHERIN ET AL. Copyright © 2011 SciRes. AM 384 211x 110 110 222 110 211x 101x 210x 100x201 222 t t t 1 K x x x x x S 111 211x 101x 200 111 211x 210x 100x 201 200 111 Figure 1. Time diagram of the system operation. 111 211x 101x 210x 200 100x 201 Е + E Figure 2. System transition graph. 111—the system begins operating, the control is acti- vated; 211 х—control has begun, the system is in up state, time х is left till the latent failure; 210 х—control has ended, the system is in up state, time х is left till the latent failure; 101 х—latent failure has occurred, control is executed, time х is left till the failure detection; 200—the failure has been detected, control has been deactivated, the system restoration has begun; 100 х—the system has failed, time х is left till the be- ginning of control; 201—the system is in down state, control has begun. Let us define the probabilities and probability densities of the embedded Markovian chain (EMC) 0 n,n transitions: 211 111 0 y pfytrtdt ; 100 111 0 y prytftdt ; 211 210 , y x prxy 0 y x; 100 210y x pryx, 0y; 200201200 111 101100201200 1 xx PPPP; 101 211y x pvyx, 0y; 210 211 , y x pvxy 0 y x . (1) Let us indicate 111 , 200 , 201 the val- ues of EMC ,0 nn stationary distribution for the states 111, 200, 201 and assume the existence of statio- nary densities 211 х , 210 х , 101 х , 100 х for the states 211x, 210 x, 101 x, 100 x respectively. The system of integral equations for th em is the following: 0 0 0 0 00 0 0000 111200 , 211 111210, 101 211, 210 211, 200101201 , 100 111210, 201100 , 2 100211101 x x x f xtrtdtyryxdy xyvxydy xyvyxdy ydy x rxt ftdtyryxdy ydy xdxxdx xdx 0 210201 1xdx (2) The last equation of the system (2) is a normalization requirement. With the help of method of successive approximations one can prove that the solution of the system of Equa- tions (2) is: 0 00 0 00 01 1 00 01 0 0 111200 , 211 , 101, , 210 , 100,, ˆ 201 . x x хht xftdt xfttxdt хht xftdt xfttxdt H tHtftdt (3) Here the con sta n t 0 is found from the normalization  Y. E. OBZHERIN ET AL. Copyright © 2011 SciRes. AM 385 requirement; 1 01 n n htr vrt is the density of 0th restoration function 1 01 n n H tRVRt of alternating process generated by RV and ; 11 n n htrv t is the density of the 1st restora- tion function 11 n n H tRVt of the same al- ternating process, 11 1 ˆ H tHt ; 00 0 ,t txvx tyhydy is the density of resi- dual time of control; 11 0 t t,xr txrxty hy dy is the density of the direct residual time left till the beginning of con- trol [3]. 3. Definition of System Stationary Characteristics Let us define system stationary characteristics: mean stationary operation time T, mean stationary restora- tion time T, statio nary availability function г K . For the initial system the sets of up states E. and down states E are as following: 111, 211, 210Ех х , 101, 200, 100, 201Eхх . Mean stationary operation time T and mean statio- nary restoration time T can be found with the help of formulas [6]: , Е E me de Т PeE de , () () (,) () E E me de TPeE de (4) where de is the EMC {,0 nn } stationary dis- tribution; me are Mean values of system dwelling times in its states; ,PeE are the probabilities of EMC {,0 nn } transitions from up into down states. Mean values of system dwelling times in the states are: 0 111mFtRtdt ; 0 211 x mxVtdt; 101mxx; 201m М ; 100mx х ; 200m М ; 0 210 x mxRtdt (5) Taking into account the Formulas (1), (3) and (5) we can define the expressions included in (4): 00 001 00 000 00 111 111211211210210 . E xx xx m edemmxx dxmxxdx F tRtdtdxRtdthyxf ydydxVtdt f yhyxdy (6) Transforming the right part of ratio (6) with regard to the formula 01 00000 yy y xx R thyxdxVt dthyx dxRtdty we get that 0. E me deM Hereafter 00 01 00 100 000 01 00 100 000 00 10 200200201 201100100101101 ˆ,, ˆ,, ˆ E mede mmmxxdxmxxdx MMHtHtftdtftdtxtx txdx MMHtHtftdtft dtVt yVt ydy MMHtHtf 00010 000 001 0 0 ˆ ˆ. tdtMf tHtdtMf tHtdtM MMMftHtdtM (7)  Y. E. OBZHERIN ET AL. Copyright © 2011 SciRes. AM 386 The identity 01 01 0 ˆ Vt,yVt,ydyM HtM Htt has been used while transforming the expression (7). Then 01 0 ˆ M. E me de MM fzHzdz (8) Hereafter 00 0 0 00 0 ,111111,211211 ,210210, 211210 . E PeEdePExP xEdxxPxEdx RtftdtVxx dxRxx dx Thus, mean stationary operation time T and mean stationary restoration time T are defined with the help of formulas ,TM 1 0 ˆ TMMM MftHtdt . Stationary availability function is defined by the ra- tio г Т К ТТ . We get 1 0 ˆ () () г M К M MM ftHtdt . (9) It is necessary to note the probability essence of the functional in the Formula (9): 1 0 ˆ f tH tdt is an average value of controls executed before the latent fail- ure detection. Important characteristics for system operation quality testing are economical criteria, such as mean income S per unit of calendar time and mean expenses C per time unit of system’s up state. To define them let us use the formulas [7]: s E E mеfеdе Smеdе , c E E mеfеdе Cmеdе . (10) Here sc fе,fe are the functions defining in- come and expenses in each state respectively. Let c1 be the income received per time unit of sys- tem’s up state; c2–expenses per time unit of restoration; c3–expenses per time unit of control; c4 are wastes caused by defective goods p er ti me un it of latent failure. For the given system the functions sc fе,f e are the following: 1 13 2 34 4 ,111, 210, ,211, , 220, ,101, 201, ,100, s се x cce х fe се сcеx cеx 3 2 34 4 0,111, 210, ,211 , ,220, ,101, 201, ,100. c еx ce х fe се сcеx cеx (11) Using Formulas (3), (5), (8) and (11) we will define the functionals included into the expressions (10): 113 1 00 234344 00 10 20 401 0 30100 00 111 111211211210210 200 200201101100 ˆ ˆ s E me fedecmccxmxdxcxmxdx cmcc Mccxxdxcxxdx cMcMcM MftHtdtM cMHtHtftdtftdth tx 0 0000 0142341 0 , ˆ tx dxVt dtft dt Vtxdx ccMcMcM cM MftHtdt (12)  Y. E. OBZHERIN ET AL. Copyright © 2011 SciRes. AM 387 23 3 0 3444 000 401 20 0 0 30 010 00000 200211 211201 101101100 201 ˆ ˆ , c E tx mefedecMcxmx dxcM cxxdxcxxdxcxxdx cM cMMftHtdtMcM cft dthtxdxVtdtft dtVtxdxMHtHtft dt 0 0243441 0 ˆ.cMcMccMcMftHt dt (13) When transforming the ratios (12), (13), the identity 0 0 0 000000 tx f t dthtxdxVtdtft dtVt,xdxMftHt dt was taken into account. Consequently, income per calendar time unit can be calculated by means of the formula: 1423 41 0 1 0 ˆ ccMcMcM cMMftHtdt S ˆ MMMftHtdt (14) Expenses per time unit of system’s good state are de- fined by the formul a: 2344 14 0 ˆ. C MMM ccccftHtdtc MMM (15) Let us write down the formulas for the definition of sta- tionary reliability and economical characteristics of the system investigated under the condition that time periods between control execution are non-random values 0 . Taking into account that in this case 1Rtt , where const , the ratio (9) transforms into: 10 1 г n n М К. M MFznvdz (16) Under the assumption that the control duration is non-random as well: 1,Vtt hwhere h const . Then Formulas (9), (14) and (15) look like this: 0 г n М К M hFn h , (17) 1423440 0 n n ccM cMcchcFnh S MhFnh (18) 2344 4 0n C Mh ccccFnhc MMM (19) One should note that if 0h and 0 we get characteristics for the system with continuous control [6]: г М К М М , 12 , cMc M SMM 2 M Cc M . (20)  Y. E. OBZHERIN ET AL. Copyright © 2011 SciRes. AM 388 Table 1. Optimal control execution period definition. Initial data Results Distribution laws of random values M , h M , h h, h s opt , h s opt S , c.u./h c opt , h c opt C , c.u./h Exponential 70 0,2 0,5 3,525 4,477 5,334 0,356 Erlangian of the 4th order 70 0,2 0,5 3,563 4,479 5,416 0,354 Erlangian of the 8th order 70 0,2 0,5 3,563 4,479 5,416 0,354 )( S 4 2 0 020 40 Figure 3. Graph of mean income Sτ against control periodicity τ. 3 2 1 0020 40 )( C 0,355 2,425 Figure 4. Graph of mean expenses Cτ against control periodicity τ. 4. Optimization of Control Execution Periodicity The problem of control execution periodicity optimiza- tion is reduced to analysis of extremums of the system characteristics г К , S, C as functions of a single vari- able . Using Formulas (17)-(19) one can find an opti- mal period of control of the system investigated for dif- ferent distribution laws of random values. The initial data for calculations of optimal values of control periodicity are: mean time of failure-free operation M , mean res- toration time M , control duration h. Let us suppose RV and to have Erlangian distribution. For the calculation of optimal value s opt providing maximal mean income s opt S per calendar time unit and of op- timal value c opt providing minimal mean expenses c opt C per time unit of system’s good state the fol- lowing initial data have been taken: с1 = 5 c.u./h; с2 = 3 c.u./h; с3 = 2 c.u./h; с4 = 4 c.u./h. The results of these calculations are represented in the Table 1. The graphs of functions S,C for the case of Erlangian dis- tribution of the 8th order are shown in Figures 3 and 4. 5. Conclusions Using an apparatus of semi-Markovian processes with a common phase field it is p ossible to define reliability an d economical stationary performance indexes of restorable system, the latent failures of which can be detected while control executio n only. It allows solving the problems of control execution periodicity optimization for gaining best system economical indexes. Later on it is planned to use the method suggested in the present article to build and investigate mathematical models of multicomponent automatized systems and of different kinds of control. 6. References [1] D. I. Cho and M. Parlar, “A Survey of Maintenance Models for Multi-Unit Systems,” European Journal of Operational Research, Vol. 51, No. 2, 1991, pp. 1-23. doi:10.1016/0377-2217(91)90141-H [2] R. Dekker and R. A. Wildeman, “A Review of Multi- Component Maintenance Models with Economic Depen- dence,” Mathematical Methods of Operations Research, Vol. 45, No. 3, 1997, pp. 411-435. doi:10.1007/BF01194788 [3] F. Beichelt and P. Franken, “Zuverlassigkeit und Instav- phaltung,” Mathematische Methoden, VEB Verlag Tech- nik, Berlin, 1983. [4] R. E. Barlow and F. Proschan, “Mathematical Theory of Reliability,” John Wiley & Sons, New York, 1965. [5] Y. E. Obzherin and A. I. Peschansky, “Semi-Markovian Model of Monotonous System Maintenance with Regard to Its Elements Deactivation and Age,” Applied Mathe- matics, Vol. 1, No. 3, 2010, pp. 234-243. doi:10.4236/am.2010.13029 [6] V. S. Korolyuk and A. F. Turbin, “Markovian Restoration Processes in the Problems of System Reliability,” Nau- kova Dumka, Kiev, 1982. [7] V. M. Shurenkov, “Ergodic Markovian Processes,” Nau- ka, Moscow, 1989. 0 20 40 0 2 4 S(τ) τ τ 0 20 40 C(τ) 3 2.425 2 1 0.355 0 |