Paper Menu >>
Journal Menu >>
 Applied Mathematics, 2011, 2, 329-342 doi:10.4236/am.2011.23039 Published Online March 2011 (http://www.SciRP.org/journal/am) Copyright © 2011 SciRes. AM Vibration and Buckling Approximation of an Axially Loaded Cylindrical Shell with a Three Lobed Cross Section Having Varying Thickness Mousa Khalifa Ahmed Department of Mathematics, Faculty of Science at Qena, South Valley University, Qena City, Egypt E-mail: mousa@japan.com Received November 2, 2010; revised January 17, 2011; accepted January 20 , 20 1 1 Abstract On the basis of the thin-shell theory and on the use of the transfer matrix approach, this paper presents the vi- brational response and buckling analysis of three-lobed cross-section cylindrical shells, with circumferen- tially varying thickness, subjected to uniform axial membrane loads. A Fourier approach is used to separate the variables, and the governing equations of the shell are formulated in terms of eight first-order differential equations in the circumferential coordinate, and by using the transfer matrix of the shell, these equations are written in a matrix differential equation. The transfer matrix is derived from the non-linear differential equa- tions of the cylindrical shells with variable thickness by introducing the trigonometric series in the longitu- dinal direction and applying a numerical integration in the circumferential direction. The natural frequencies and critical loads beside the mode shapes are calculated numerically in terms of the transfer matrix elements for the symmetrical and antisymmetrical vibration modes. The influences of the thickness variation of cross- section and radius variation at lobed corners of the shell on the natural frequencies, mode shapes and critical loads are examined. Keywords: Free Vibration, Buckling, Vibration of Continuous System, Noncircular Cylindrical Shell, Transfer Matrix Approach, Variable Thickness, Axial Loads 1. Introduction In recent years, structural engineers have been gradually concerned with the analysis of vibration and stability problems of circular cylindrical shells which have non- circular profiles because of the greatest important in many engineering applications such as in the design of mach- ines and structures. The vibration and buckling modes of thin elastic shells essentially depend on some determin- ing functions such as the radius of the curvature of the neutral surface, the shell thick ness, the shape of the shell edges, etc. In simple cases when these functions are con- stant, the vibration and buckling modes occupy the entire shell surface. If the determining functions vary from point to point of the neutral surface then localization of the vi- bration and buckling modes lies near the weakest lines on the shell surface, and this kind from problems is too difficult because the radius of its curvature varies with the circumferential coordinate, closed-form or analytic solutions cannot be obtained, in general, for this class of shells, numerical or approximate techniques are necessa- ry for their analysis. The vibration and stability of circu- lar cylindrical shells have been studied by many resear- chers since the basic equations for these were established by Flügge [1] and Donnell [2]. Becker and Gerard [3], Gerard [4] Cheng and Ho [5], Jones [6], Stavsky and Friedland [7] and Lei and Cheng [8] studied the elastic stability of orthotropic or composite shells under axial loading. Greenberg and Stavsky [9-12] studied the vibra- tions and buckling of laminated orthotropic shells under compression. Rosen and Singer [13] have carried out a theoretical and experimental investigation of the vibra- tions of axially loaded stiffened cylindrical shells. Ya- mada et al. [14,15] studied the vibration and stability of circular cylindrical shells subjected to axial load and also the free vibration of noncircular cylindrical shells with variable circumferential profiles. In recent years, Suzuki and Leissa [16] beside Kumar and Singh [17] studied the approximate vibrational analysis of noncircular cylin- drical shells having circumferentially varying thickness 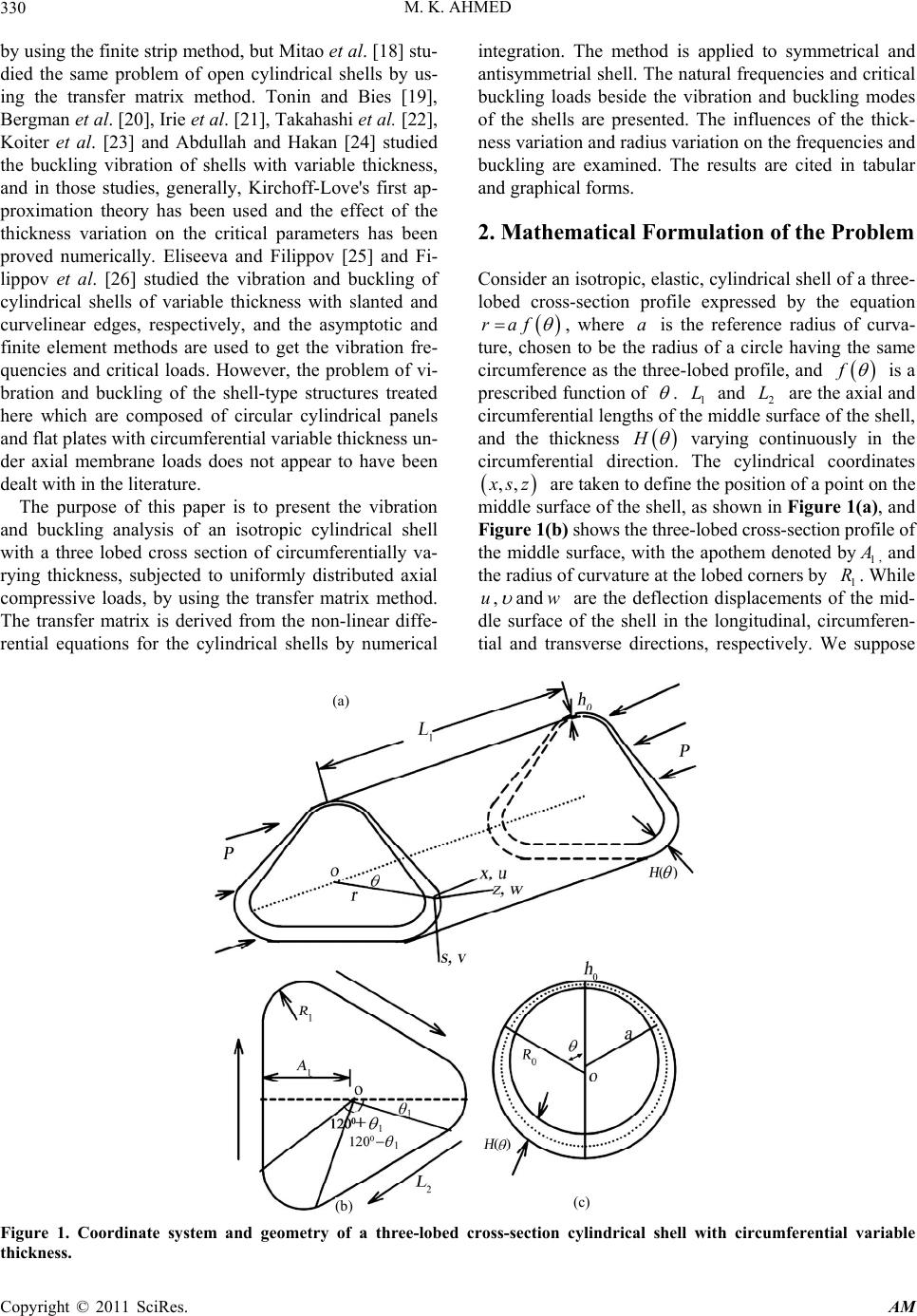 M. K. AHMED Copyright © 2011 SciRes. AM 330 by using the finite strip method, but Mitao et al. [18] stu- died the same problem of open cylindrical shells by us- ing the transfer matrix method. Tonin and Bies [19], Bergman et al. [20], Irie et al. [21], Takahashi et al. [22], Koiter et al. [23] and Abdullah and Hakan [24] studied the buckling vibration of shells with variable thickness, and in those studies, generally, Kirchoff-Love's first ap- proximation theory has been used and the effect of the thickness variation on the critical parameters has been proved numerically. Eliseeva and Filippov [25] and Fi- lippov et al. [26] studied the vibration and buckling of cylindrical shells of variable thickness with slanted and curvelinear edges, respectively, and the asymptotic and finite element methods are used to get the vibration fre- quencies and critical loads. However, the problem of vi- bration and buckling of the shell-type structures treated here which are composed of circular cylindrical panels and flat plates with circumferential variable thickness un- der axial membrane loads does not appear to have been dealt with in the literature. The purpose of this paper is to present the vibration and buckling analysis of an isotropic cylindrical shell with a three lobed cross section of circumferentially va- rying thickness, subjected to uniformly distributed axial compressive loads, by using the transfer matrix method. The transfer matrix is derived from the non-linear diffe- rential equations for the cylindrical shells by numerical integration. The method is applied to symmetrical and antisymmetrial shell. Th e natural frequencies and critical buckling loads beside the vibration and buckling modes of the shells are presented. The influences of the thick- ness variation and radius variation on the frequencies and buckling are examined. The results are cited in tabular and graphical forms. 2. Mathematical Formulation of the Problem Consider an isotropic, elastic, cylindrical shell of a three- lobed cross-section profile expressed by the equation raf , where a is the reference radius of curva- ture, chosen to be the radius of a circle having the same circumference as the three-lobed profile, and f is a prescribed function of . 1 L and 2 L are the axial and circumferential lengths of the middle su rface of the shell, and the thickness H varying continuously in the circumferential direction. The cylindrical coordinates ,, x sz are taken to define the position of a point on the middle surface of the shell, as shown in Figure 1(a), and Figure 1(b) shows the three-lobed cross-section profile of the middle surface, with the apothem denoted by1 A , and the radius of curvature at the lobed corners by 1 R. While ,u and w are the deflection displacements of the mid- dle surface of the shell in the longitudinal, circumferen- tial and transverse directions, respectively. We suppose Figure 1. Coordinate system and geometry of a three-lobed cross-section cylindrical shell with circumferential variable thickness. (a) (b) (c)  M. K. AHMED Copyright © 2011 SciRes. AM 331 that the shell thickness H at any point along the cir- cumference is small and depends on the coordinate and takes the following form: 0 H h (1) where 0 h is a small parameter, chosen to be the average thickness of the shell over the length 2 L. For the cylin- drical shell which cross-section is obtained by the cuta- way the circle of the radius 0 r from the circle of the radius 0 R(see Figure 1(c)) functio n have the form: 11cos where is the amplitude of thi- ckness variation, 0 dh , and d is the distance be- tween the circles centers. In general case 00hH is the minimum value of while mHh is the maximu m value of , and in case of 0d the shell has constant thickness 0 h. The dependence of the shell thickness ratio 0m hh on has the form 12 . For studying the free harmonic vibrations and buck- ling of the shell under consideration, the equilibrium equations of forces for the cylindrical shell, subjected to an axial compressive load P, based on the Goldenveiz- er-Novozhilov theory are taken from [27,28] as follows: 22 2 0, 0, 0, 0, 0, 0,0, xsxxs ss xs sxsxx xssss ssxxssxsx NN PuHuNNQRPH QQNRPwHwMM Q MMQ SQMNNMR (2) where Nx, Ns and Qx, Qs are the normal and transverse shearing forces in the x and s directions, respectively, Nsx and Nxs are the in-plane shearing forces, Mx, Ms and Mxs, Msx are the bending moment and the twisting moment, respectively, Ss is the equivalent (Kelvin-Kirchoff) shea- ring force, P is the axial force per unit length, constant along the circumference, is the mass density, R is the radius of curvature of the middle surface, is the an- gular frequency of vibration, 'x , and s . The relations between strains and deflections for the cylindrical shells used here are taken from [29] as fol- lows: ,,, 0, 0, ,, xsxsxz x szsx xs ssx sxsx uwRuw wRkkwRR,kk R (3) where x and s are the normal strains of the middle surface of the shell, , x sxz and s z are the shear strains, and the quantities ,, x ssx kkk and x s k represen- ting the change of curvature and the twist of the middle surface, x is the bending slope, and s is the angu- lar rotation. The components of force and moment resultants in terms of Equation (3) are given as: ,,12 ,,1 xxs ssxxsxs xxsss xsxsx NDNDN D, MKkkMKkkM kk (4) From Equations (2)-(4 ), with eliminating the variables ,,,, , x sxxs xxs QQN NMM and s x M wh ich are not dif- fer-rentiated with respect to s , the system of the partial differential equations fo r the state variables ,,, , s uw ,, s ss M SN and s x N of the shell are obtained as fol- lows: 2 22 2 22 2( (1))6,,, ,21, 1, , 1. sx sss ss xssss sssss sx sx s uD NHRNDwRuwr MKNRDRuMSK SNRM KwPwHwNPSRNH NDuPu NHu (5) The quantities D and K, respectively, are the ex- tensional and flexural rigidities expressed in terms of the Young’s modulus E, Poisson’s ratio and the wall thickness H as the form: 2 1DEH and 32 12 1KEH , and under the variable thickness case, using Equation (1), those are written as follows:  M. K. AHMED Copyright © 2011 SciRes. AM 332 2 00 1DEh D (6) 323 3 00 1KEh K (7) where 0 D and 0 K are the reference extensional and flexural rigidities of the shell, chosen to be the averages on the middle surface of the shell over the length 2 L. For the free vibration of a simply supported shell, the solution of the system of Equation (5) is sought as fol- lows: 111 1 1 1 ,cos,,,,,sin,, sin, ,,,,,,,,,,sin, ,,,, ,,,cos, ,,,,sin, ,,, c ss xsss xsss xssxxxssxx xs xs xssxxs sx mmm u xsUsxxswxsVsWsxxssx LLL m NxsNxsQxsSxsNsNsQsSsx L m N xsN xsQxsNsNsQsx L m MxsMxsMsMsx L M xsM x,sM sM s 1 os ,1,2, mxm L (8) where m is the axial half wave number and the quanti- ties ,UsV s are the state variables and undeter- mined functions of s . 3. Matrix Form of the Basic Equations The differential equations as shown previously are mod- ified to a suitable form and solved numerically. Hence, by substituting Equation (8) into Equation (5) and take relations (6) and (7) into account, the system of vibration equations of the shell can be written in non-linear ordi- nary differential equations referred to the variable s only are obtained, in the following matrix form: 12 1418 21 2327 32 34 41 43 45 47 54 56 63 65 67 7276 78 81 87 00000 0 0000 000000 0000 000 0 00 00 00 0 0000 0 000000 s s s s s s sx VV V UU VVV VV VV WW VVVV d aVV ds MM VVV S VVV N VV N s s sx . S N N (9) By using the state vector of fundamental unknowns Z s, system (9) can be written as follows: d aZsVsZs ds (10) ,, ,,,,,, T sssssx ZsUVWM S N N 0 2 0 ,,,, , ,1, s sss UVWk UVW kM M 3 1 ,,1,, , sssxsssxm SNN SNN. L For the noncircular cylindrical shell which cross-sec- tion profile is obtained by function ( raf ), the hypotenuse ds of a right triangle whose sides are infinitesimal distances along the surface coordinates of the shell takes the form 22 2 ds drrd , then we have 2 2df ds f d ad (11) By using Equation (11), the system of vibration Equa- tions (10) takes the form: dZVZ d (12)  M. K. AHMED Copyright © 2011 SciRes. AM 333 Where 2 2, df fd and the coefficients matrix V are give n as: 12 Vml , 22 14 6Vmlh , 32 18 61Vmlh , 21 Vml , 23 1Vc , 32 27 12Vmlh , 32 1Vc , 34 Vml , 41 Vc 2 43 Vml , 3 45 1Vh , 46 12Vhc , 22 54 21Vhml 56 1V , 43 232 63 1212Vml hmlPml , 65 Vml , 67 Vm/lc , 3 2 72 12VPml hml , 76 1Vc , 78 Vml , 3 22 2 81 11212VhmlPmlhml , 87 Vml in terms of the following dimensionless shell parameters: frequency parameter222 00 haD , load factor 20 PaK P, 1 lLa and 0 hha. As the function f formulates the profile of a shell with a three lobed cross section, and expressed as in [15] 2 22 111 111 0 0 11 11 2 022 000 111 1111 00 11 1 2cos4 sin,for0 cosec30, ,for120 () , 2cos1204sin120,for 120120 sec, ,for120180 acc ac ac f acc ac ac 1 111111 1111 ,, ,tan343aAacRacacac The state vector Z of fundamental unknowns can be expressed as in [30] 0ZYZ (13) by using the transfer matrix Y of the shell, and the substitution of the expression into Equation (10) yields , 0 dd YVY YI. (14) The governing system (14) is too complicated to ob- tain any closed form solution, and this problem is highly favorable for solving by numerical methods. Hence, the matrix Y is obtained by using numerical integra- tion, by use of the Runge-kutta integration method of forth order, with the starting value 0YI (unit matrix) which is given by taking 0 in Equation (13), and its solution depends only on the geometric and mar- tial properties of the shell, and the same solution can be used for appropriate boundary conditions imposed at the shell circumference. For a plane passing through the central axis in a shell with structural symmetry, symmetrical and antisymme- trical profiles can be obtained, and consequently, only one-half of the shell circumference is considered with the boundary conditions at the ends taken to be the symme- tric or antisymmetric conditions. Therefore, the boundary conditions for symmetrical and antisymmetrical vibra- tions are: 0, 0, 0,0,respectively sssx ss VSN UWN M (15) 4. Natural Frequencies and Modes A shell with ( 1f ) represents a circular cylindrical shell of constant thickness. The substitution of Equation (14) into Equation (12) results the frequency equations 21 23 25 27 41 43 45 47 61 63 65 67 81 83 85 870 0 s s YYYYU YYYYW YYYYM YYYYN for symmetrical vibration, (16)  M. K. AHMED Copyright © 2011 SciRes. AM 334 12 14 16 18 32 34 36 38 52 45 56 58 72 74 76 780 0 s s sx YYYY V YYYY YYYY S YYYY N for antisymmetrical vibration. (17) The matrix [V] depends on the frequency parameter and the load factor Pin addition to , Y is also a function of these parameters. Equations (16) and (17) give a set of linear homogenous equations with unknown coefficients 0 T ss U,W,M ,N and 0 T ss sx V,,S,N , respectively, at 0 . For the existence of a nontrivial solution of these coefficients, the determinant of the co- efficient matrix should be vanished. The standard proce- dures cannot be employed for obtaining the eigenvalues of the frequency equations. The nontrivial solution is found by searching the values which make the deter- minant zero by using Lagrange interpolation procedure. The eigenvalues of which make the determinant zero give the natural frequencies of the shell. The mode sha- pes at any point of the cross-section of the shell, over the length 2 L, are determined by calculating the eigenvec- tors corresponding to the eigenvalues by using Gaussian elimination procedure. For free vibration problems with- out prestress the natural frequencies result when 0P , and for vibration problems with prestress the natural frequencies result for non-zero values of P. For buck- ling problems, the buckling load results when 0 in Equations (16) and (17), and the lowest values of the buckling loads give the critical loads of the shell. 5. Numerical Results and Discussion A computer program based on the analysis described herein has been developed to study the symmetrical and antisymmetrical vibrations of the considered shell, and the vibration frequencies and the critical buckling loads of the shell with circumferential variable thickness, are calculated numerically. Results for uniform thickness of circular cylindrical shells (1 and 1 ) are obtained. The correctness of applied method is cited in [31] with other literature. Our study is divided into two parts: 5.1. Vibrations The study of vibration s is determined by finding the nat- ural frequencies and corresponding mode shapes at 0P . The numerical results presented herein pertain to the minimum frequencies and the associated mode shapes of the shell. The effect of variation in thickness on the minimum frequencies of vibration, Tables 1 and 2 give the funda- Table 1. The fundamental frequencies λ for symmetric modes of a three-lobed cross-section cylindrical shell with variable thickness, for which (=1,= 0.3,= 4,=0.02mνlh ). 1 2 3 4 5 0.0 0.019568 0.028312 0.035171 0.041386 0.047378 0.2 0.019736 0.027475 0.034116 0.040315 0.046313 0.4 0.029985 0.035825 0.040712 0.045741 0.051032 0.6 0.039787 0.050925 0.056946 0.061702 0.066208 0.8 0.053618 0.068977 0.079662 0.086458 0.091184 1.0 0.074135 0.087694 0.100293 0.110095 0.115710 Table 2. The fundamental frequenc ies λ for antisymmetric modes of a three-lobed cross-section cylindrical shell with vari- able thickness, for which (=1,=0.3,= 4,=0.02mνlh ). 1 2 3 4 5 0.0 0.019568 0.026504 0.033007 0.039530 0.046143 0.2 0.019736 0.026235 0.032464 0.038710 0.045019 0.4 0.029985 0.036643 0.042989 0.049309 0.055683 0.6 0.045266 0.054520 0.062245 0.069595 0.076761 0.8 0.070167 0.082516 0.091719 0.100270 0.108014 1.0 0.074135 0.087694 0.100293 0.110095 0.115710  M. K. AHMED Copyright © 2011 SciRes. AM 335 mental frequencies for symmetric and antisymmetric vi- brations of a three-lobed cross-section cylindrical shell, with the same circumferential length, versus the radius ratio for different values of . The results presen- ted in these tables show that the increase of the thickness ratio resulted in an increase in the fundamental frequen- cies for each value of the radius ratio. These results con- firm the fact that the effect of increasing the shell flexur- al rigidity becomes larger than that of increasing the shell mass when the thickness ratio in creases. Also, the incr- ease of the radius ratio for the chosen values of the thick- ness ratio results in an increase in the frequencies and they become larger at 1 (circular cylinder). In case of a constant thickness (1 ), the symmetric and antisymmetric type vibrations have the same values ver- sus the radius ratio, except for the symmetric and antisy- mmetric ones with respect to three planes passing through a corner and an axial mid-line of the opposite wall give unidentical values. For a circular cylindrical shell (1 ), the symmetric and antisymmetric type vibrations give the same values versus the thickness ratio. In Tables 3 and 4, the first five frequencies of symmetric and antisym- metric type vibrations are presented for different values of radius ratios (05,07,10... ) and thickness ratios (1,2,5 ). The numbers in the parentheses are the axi- al half wave numbers of the mode in the x -direction. An ordering change of the mode in the x -direction can be seen for certain values of and . In Table 5, the comparison of the fundamental fre- quencies for symmetric and antisymmetric vibrations of a shell with radius ratio (05. ) is cited for different axial half wave numbers and thickness ratio. With an in- crease of axial half wave number aspect the thickness ratio, the fundamental frequencies increase. It is shown by this table that the values of fundamental frequencies for symmetric and antisymmetric modes are very close to each other for the large mode number, m. Figures (2-4) show the first five circumferential mode shapes of a three-lobed cross-section cylindrical shell of variable thickness for symmetric and antisymmetric vi- bration modes corresponding to the frequencies listed in Tables 3 and 4. The thick lines show the composi tion of the circumferential and transverse deflections, and the numbers in the parentheses are the axial half wave num- Table 3. The first five frequencies λ for symmetric modes of the shell, with (=0.3,=4,=0.02νlh ). Modes First Second Third Forth Fifth 1 0.036513(1) 0.037069(1) 0.046870(2) 0.052419(2) 0.065142(3) [15]0.03653 0.03716 0.04691 0.05248 - 0.5 2 0.043201(1) 0.056216(1) 0.061026(2) 0.082699(3) 0.086711(2) 5 0.057253(1) 0.092093(2) 0.100173(1) 0.125091(3) 0.162623(2) 0.7 2 0.059096(1) 0.075956(1) 0.086524(2) 0.116652(3) 0.121253(2) 5 0.077638(1) 0.116732(1) 0.125442(2) 0.170122(3) 0.200812(1) 1.0 2 0.087641(1) 0.114102(1) 0.130261(1) 0.177653(2) 0.201403(1) 5 0.114922(1) 0.133672(1) 0.210313(2) 0.218261(1) 0.246320(1) Table 4. The first five frequencies λ for antisymmetric modes of the shell, with (=0.3,=4,=0.02νlh ). Modes First Second Third Forth Fifth 1 0.037069(1) 0.052419(2) 0.064586(1) 0.068488(3)0.089686(1) [15]0.03716 0.05240 0.06470 - 0.8982 0.5 2 0.044870(1) 0.066191(2) 0.080338(1) 0.086261(3)0.124450(1) 5 0.065098(1) 0.099283(2) 0.121120(1) 0.131662(3)0.194172(1) 0.7 2 0.066803(1) 0.092671(2) 0.093671(1) 0.117432(3)0.139351(1) 5 0.091152(1) 0.131372(1) 0.136280(2) 0.172388(3)0.201140(1) 1.0 2 0.087659(1) 0.114122(1) 0.130263(1) 0.177656(2)0.201405(1) 5 0.115203(1) 0.133701(1) 0.210395(2) 0.218264(1)0.246371(1) 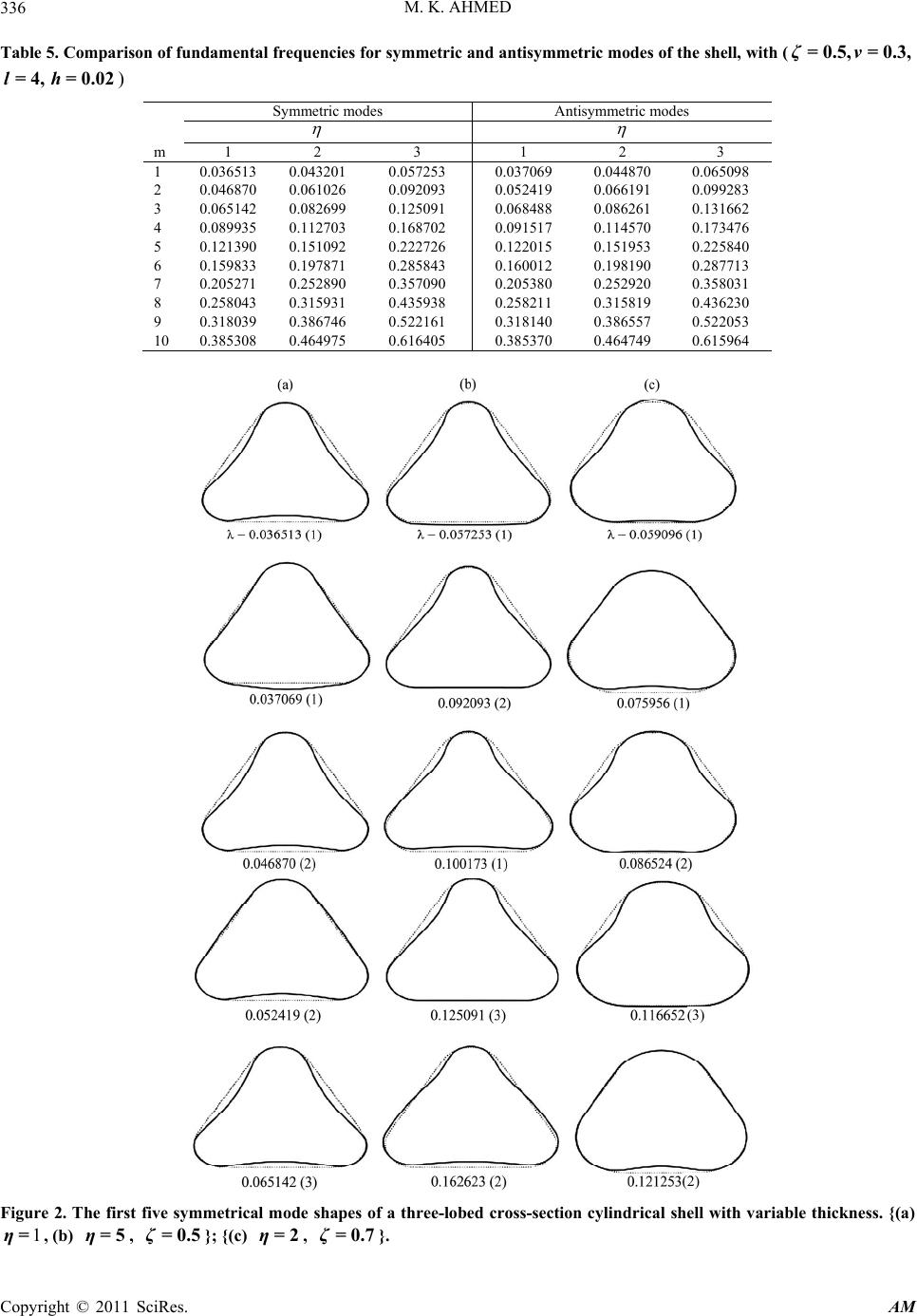 M. K. AHMED Copyright © 2011 SciRes. AM 336 Table 5. Comparison of f undamental fr equencie s for symmetric and anti symmetric modes of the shell, with (0.5,=0.3,ζ=ν = 4,= 0.02lh ) Symmetric modes Antisymmetric modes m 1 2 3 1 2 3 1 0.036513 0.043201 0.057253 0.037069 0.044870 0.065098 2 0.046870 0.061026 0.092093 0.052419 0.066191 0.099283 3 0.065142 0.082699 0.125091 0.068488 0.086261 0.131662 4 0.089935 0.112703 0.168702 0.091517 0.114570 0.173476 5 0.121390 0.151092 0.222726 0.122015 0.151953 0.225840 6 0.159833 0.197871 0.285843 0.160012 0.198190 0.287713 7 0.205271 0.252890 0.357090 0.205380 0.252920 0.358031 8 0.258043 0.315931 0.435938 0.258211 0.315819 0.436230 9 0.318039 0.386746 0.522161 0.318140 0.386557 0.522053 10 0.385308 0.464975 0.616405 0.385370 0.464749 0.615964 Figure 2. The first five symmetrical mode shapes of a three-lobed cross-section cylindrical shell with variable thickness. {(a) 1η=, (b) 5η=, 0.5ζ=}; {(c) 2η=, 0.7ζ=}. (3) (2) 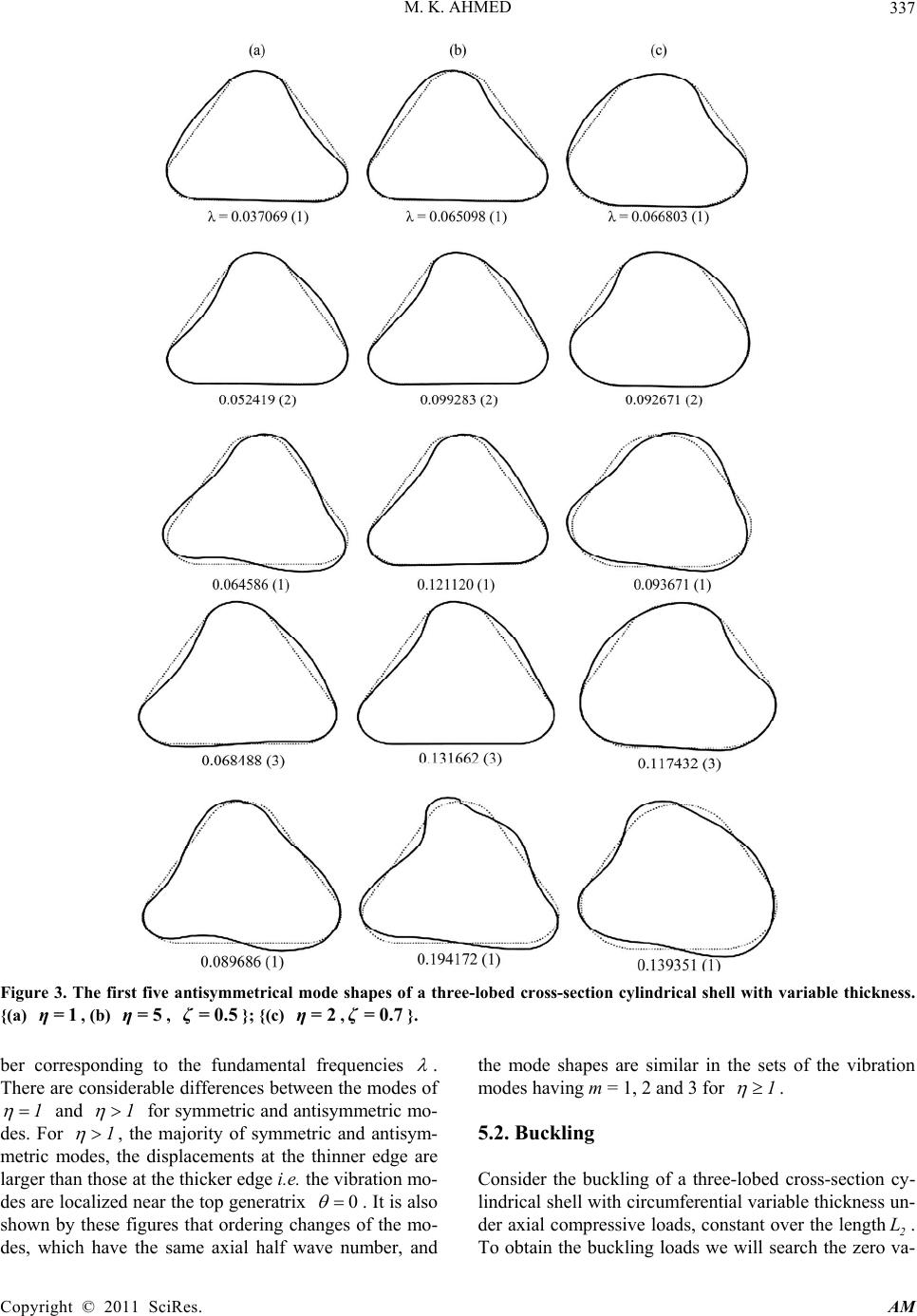 M. K. AHMED Copyright © 2011 SciRes. AM 337 Figure 3. The first five antisymmetrical mode shapes of a three-lobed cross-section cylindrical shell with variable thickness. {(a) 1η=, (b) 5η=, 0.5ζ=}; {(c) 2η=,0.7ζ=}. ber corresponding to the fundamental frequencies . There are considerable differences between the modes of 1 and 1 for symmetric and antisymmetric mo- des. For 1 , the majority of symmetric and antisym- metric modes, the displacements at the thinner edge are larger than those at the thicker edge i.e. the vibration mo- des are localized near the top generatrix 0 . It is also shown by these figures that ordering changes of the mo- des, which have the same axial half wave number, and the mode shapes are similar in the sets of the vibration modes having m = 1, 2 and 3 for 1 . 5.2. Buckling Consider the buckling of a three-lobed cross-section cy- lindrical shell with circumferential variable thickness un- der axial compressive loads, constant over the length2 L. To obtain the buckling loads we will search the zero va- 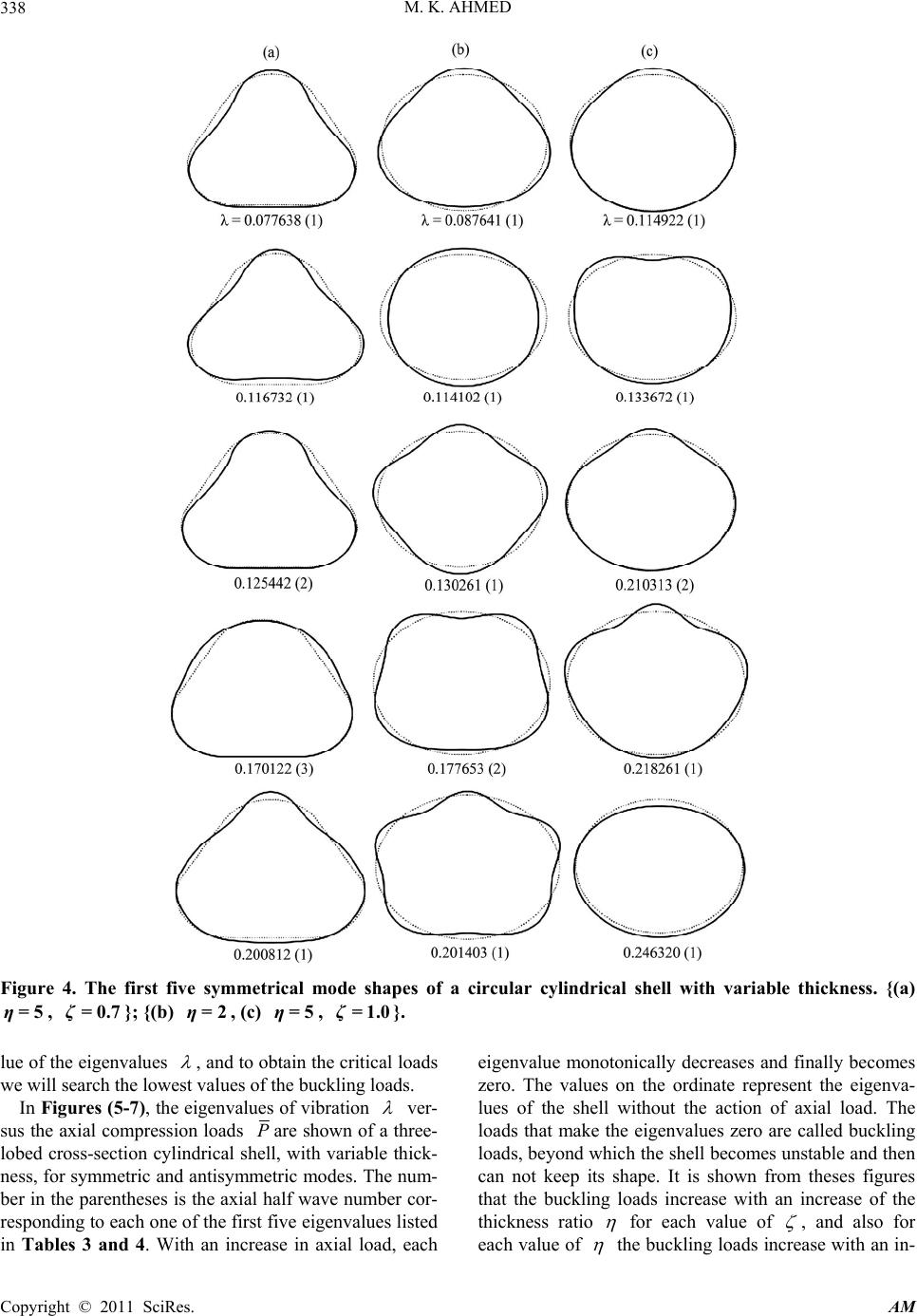 M. K. AHMED Copyright © 2011 SciRes. AM 338 Figure 4. The first five symmetrical mode shapes of a circular cylindrical shell with variable thickness. {(a) 5η=, 0.7ζ=}; {(b) 2η=, (c) 5η=, 1.0ζ=}. lue of the eigenvalues , and to obtain the critical loads we will search the lowest values of the buckling loads. In Figures (5-7 ), the eigenvalues of vibration ver- sus the axial compression loads Pare shown of a three- lobed cross-section cylindrical shell, with variable thick- ness, for symmetric and antisy mmetr ic mo de s. Th e nu m- ber in the parentheses is the axial half wave number cor- responding to each one of the first five eigenvalues listed in Tables 3 and 4. With an increase in axial load, each eigenvalue monotonically decreases and finally becomes zero. The values on the ordinate represent the eigenva- lues of the shell without the action of axial load. The loads that make the eigenvalues zero are called buckling loads, beyond which the shell beco mes unstable and then can not keep its shape. It is shown from theses figures that the buckling loads increase with an increase of the thickness ratio for each value of , and also for each value of the buckling loads increase with an in- 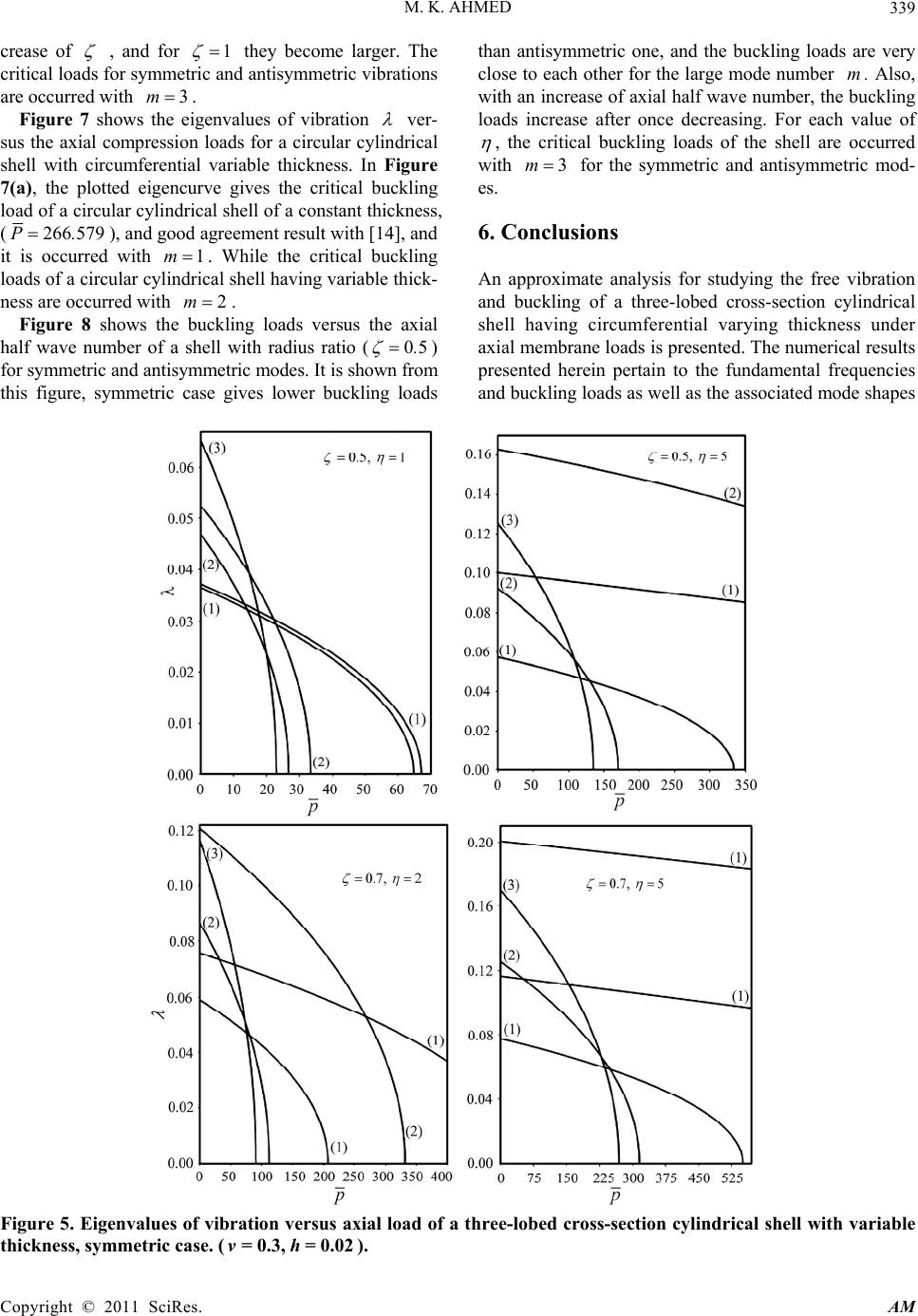 M. K. AHMED Copyright © 2011 SciRes. AM 339 crease of , and for 1 they become larger. The critical loads for symmetric and antisymmetric vibrations are occurred with 3m. Figure 7 shows the eigenvalues of vibration ver- sus the axial compression loads for a circular cylindrical shell with circumferential variable thickness. In Figure 7(a), the plotted eigencurve gives the critical buckling load of a circular cylindrical shell of a constant thickness, (266 579P.), and good agreement result with [14], and it is occurred with 1m. While the critical buckling loads of a circular cylindrical shell having variable thick- ness are occurred with 2m. Figure 8 shows the buckling loads versus the axial half wave number of a shell with radius ratio (05. ) for symmetric and antisymmetric modes. It is shown from this figure, symmetric case gives lower buckling loads than antisymmetric one, and the buckling loads are very close to each other for the large mode number m. Also, with an increase of axial half wave number, the buckling loads increase after once decreasing. For each value of , the critical buckling loads of the shell are occurred with 3m for the symmetric and antisymmetric mod- es. 6. Conclusions An approximate analysis for studying the free vibration and buckling of a three-lobed cross-section cylindrical shell having circumferential varying thickness under axial membrane loads is presented. The numerical results presented herein pertain to the fundamental frequencies and buckling loads as well as the associated mode shapes Figure 5. Eigenvalues of vibration versus axial load of a three-lobed cross-section cylindrical shell with variable thickness, symmetric case. (= 0.3,= 0.02νh). 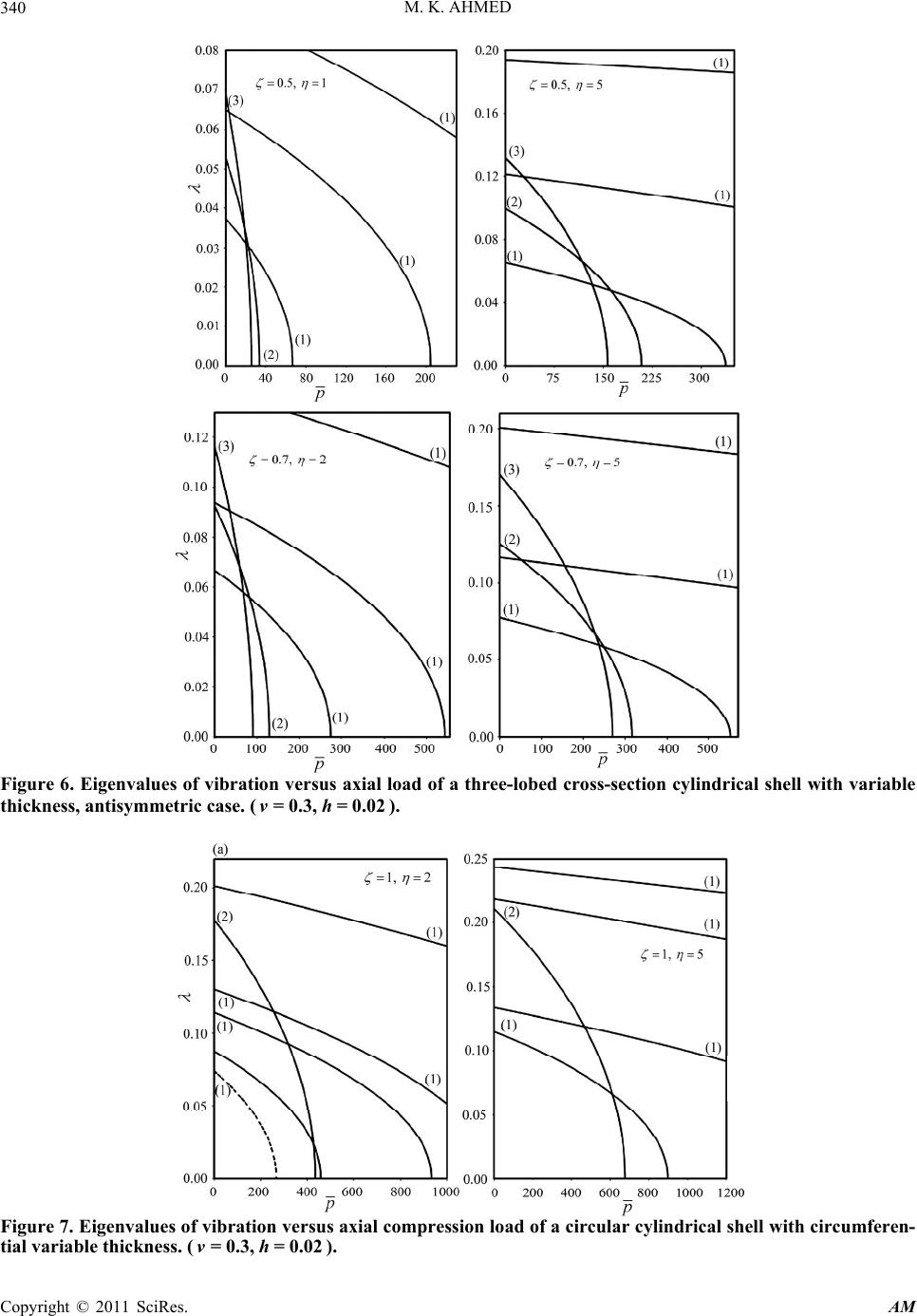 M. K. AHMED Copyright © 2011 SciRes. AM 340 Figure 6. Eigenvalues of vibration versus axial load of a three-lobed cross-section cylindrical shell with variable thickness, antisymmetric case. (=0.3, =0.02νh). Figure 7. Eigenvalues of vibration versus axial compression load of a circular cylindrical shell with circumferen- tial vari abl e thickness. (=0.3, =0.02νh). 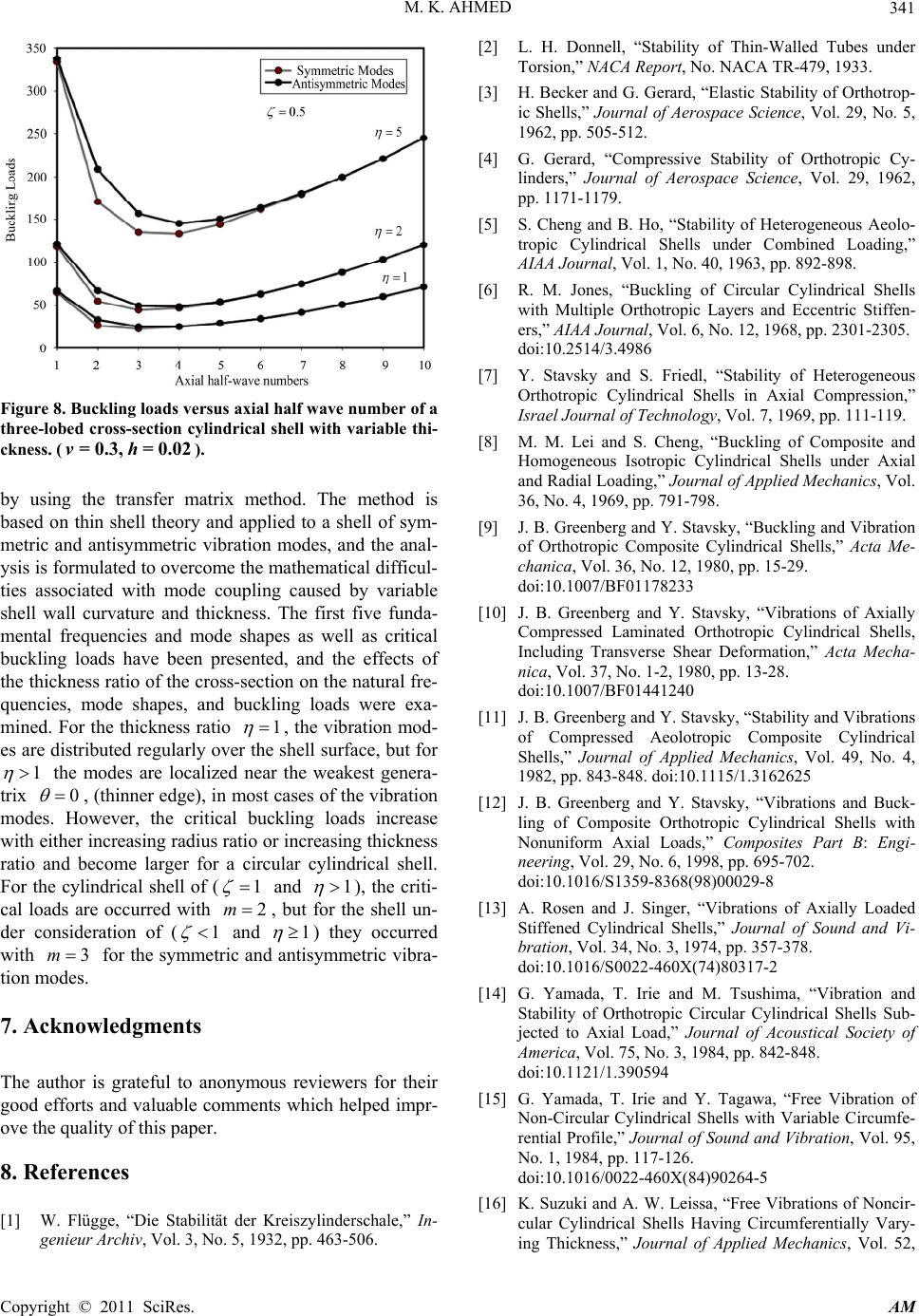 M. K. AHMED Copyright © 2011 SciRes. AM 341 Figure 8. Buckling loads versus axial half wave number of a three-lobed cross-section cylindrical shell with variable thi- ckness. (=0.3,= 0.02νh). by using the transfer matrix method. The method is based on thin shell theory and applied to a shell of sym- metric and antisymmetric vibration modes, and the anal- ysis is formulated to overcome the mathematical difficul- ties associated with mode coupling caused by variable shell wall curvature and thickness. The first five funda- mental frequencies and mode shapes as well as critical buckling loads have been presented, and the effects of the thickness ratio of the cross-section on the natural fre- quencies, mode shapes, and buckling loads were exa- mined. For the thickness ratio 1 , the vibration mod- es are distributed regularly over the shell surface, but for 1 the modes are localized near the weakest genera- trix 0 , (thinner edge), in most cases of the vibration modes. However, the critical buckling loads increase with either increasing radius ratio or increasing thickness ratio and become larger for a circular cylindrical shell. For the cylindrical shell of (1 and 1 ), the criti- cal loads are occurred with 2m , but for the shell un- der consideration of (1 and 1 ) they occurred with 3m for the symmetric and antisymmetric vibra- tion modes. 7. Acknowledgments The author is grateful to anonymous reviewers for their good efforts and valuable comments which helped impr- ove the quality of this paper. 8. References [1] W. Flügge, “Die Stabilität der Kreiszylinderschale,” In- genieur Archiv, Vol. 3, No. 5, 1932, pp. 463-506. [2] L. H. Donnell, “Stability of Thin-Walled Tubes under Torsion,” NACA Report, No. NACA TR-479, 1933. [3] H. Becker and G. Gerard, “Elastic Stability of Orthotrop- ic Shells,” Journal of Aerospace Science, Vol. 29, No. 5, 1962, pp. 505-512. [4] G. Gerard, “Compressive Stability of Orthotropic Cy- linders,” Journal of Aerospace Science, Vol. 29, 1962, pp. 1171-1179. [5] S. Cheng and B. Ho, “Stability of Heterogeneous Aeolo- tropic Cylindrical Shells under Combined Loading,” AIAA Journal, Vol. 1, No. 40, 1963, pp. 892-898. [6] R. M. Jones, “Buckling of Circular Cylindrical Shells with Multiple Orthotropic Layers and Eccentric Stiffen- ers,” AIAA Journal, Vol. 6, No. 12, 1968, pp. 2301-2305. doi:10.2514/3.4986 [7] Y. Stavsky and S. Friedl, “Stability of Heterogeneous Orthotropic Cylindrical Shells in Axial Compression,” Israel Journal of Technology, Vol. 7, 1969, pp. 111-119. [8] M. M. Lei and S. Cheng, “Buckling of Composite and Homogeneous Isotropic Cylindrical Shells under Axial and Radial Loading,” Journal of Applied Mechanics, Vol. 36, No. 4, 1969, pp. 791-798. [9] J. B. Greenberg and Y. Stavsky, “Buckling and Vibration of Orthotropic Composite Cylindrical Shells,” Acta Me- chanica, Vol. 36, No. 12, 1980, pp. 15-29. doi:10.1007/BF01178233 [10] J. B. Greenberg and Y. Stavsky, “Vibrations of Axially Compressed Laminated Orthotropic Cylindrical Shells, Including Transverse Shear Deformation,” Acta Mecha- nica, Vol. 37, No. 1-2, 1980, pp. 13-28. doi:10.1007/BF01441240 [11] J. B. Greenberg and Y. Stavsky, “Stability and Vibrations of Compressed Aeolotropic Composite Cylindrical Shells,” Journal of Applied Mechanics, Vol. 49, No. 4, 1982, pp. 843-848. doi:10.1115/1.3162625 [12] J. B. Greenberg and Y. Stavsky, “Vibrations and Buck- ling of Composite Orthotropic Cylindrical Shells with Nonuniform Axial Loads,” Composites Part B: Engi- neering, Vol. 29, No. 6, 1998, pp. 695-702. doi:10.1016/S1359-8368(98)00029-8 [13] A. Rosen and J. Singer, “Vibrations of Axially Loaded Stiffened Cylindrical Shells,” Journal of Sound and Vi- bration, Vol. 34, No. 3, 1974, pp. 357-378. doi:10.1016/S0022-460X(74)80317-2 [14] G. Yamada, T. Irie and M. Tsushima, “Vibration and Stability of Orthotropic Circular Cylindrical Shells Sub- jected to Axial Load,” Journal of Acoustical Society of America, Vol. 75, No. 3, 1984, pp. 842-848. doi:10.1121/1.390594 [15] G. Yamada, T. Irie and Y. Tagawa, “Free Vibration of Non-Circular Cylindrical Shells with Variable Circumfe- rential Profile,” Journal of Sound and Vibration, Vol. 95, No. 1, 1984, pp. 117-126. doi:10.1016/0022-460X(84)90264-5 [16] K. Suzuki and A. W. Leissa, “Free Vibrations of Noncir- cular Cylindrical Shells Having Circumferentially Vary- ing Thickness,” Journal of Applied Mechanics, Vol. 52,  M. K. AHMED Copyright © 2011 SciRes. AM 342 No. 1, 1985, pp. 149-154. doi:10.1115/1.3168986 [17] V. Kumar and A. V. Singh, “Approximate Vibrational Analysis of Noncircular Cylinders Having Varying Thi- ckness,” AIAA Journal, Vol. 30, No. 7, 1991, pp. 1929- 1931. doi:10.2514/3.11161 [18] O. Mitao, T. Hideki and S. Tsunemi, “Vibration Analysis of Curved Panels with Variable Thickness,” Engineering Computations, Vol. 13, No. 2, 1996, pp. 226-239. doi:10.1108/02644409610114549 [19] R. F. Tonin and D. A. Bies, “Free Vibration of Circular Cylinders of Variable Thickness,” Journal of Sound and Vibration, Vol. 62, No. 2, 1979, pp. 165-180. doi:10.1016/0022-460X(79)90019-1 [20] R. M. Bergman, S. A. Sidorin and P. E. Tovstik, “Con- struction of Solutions of the Equations for Free Vibration of a Cylindrical Shell of Variable Thickness along the Directrix,” Mechanics of Solids, Vol. 14, No. 4, 1979, pp. 127-134. [21] T. Irie, G. Yamada and Y. Kaneko, “Free Vibration of a Conical Shell with Variable Thickness,” Journal of Sound and Vibration, Vol. 82, No. 1, 1982, pp. 83-94. doi:10.1016/0022-460X(82)90544-2 [22] S. Takahashi, K. Suzuki and T. Kosawada, “Vibrations of Conical Shells with Varying Thickness,” Japan Society of Mechanical Engineering, Vol. 28, No. 235, 1985, pp. 117-123. [23] W. I. Koiter, I. Elishakoff, Y. W. Li and J. H. Starness, “Buckling of an Axially Compressed Cylindrical Shell of Variable Thickness,” International Journal of Solids and Structures, Vol. 31, No. 6, 1994, pp. 797-805. doi:10.1016/0020-7683(94)90078-7 [24] H. Abdullah and H. Erdem, “The Stability of Non-Ho- mogenous Elastic Cylindrical Thin Shells with Variable Thickness under a Dynamic External Pressure,” Turkish Journal of Engineering and Environmental Sciences, In Turkish, Vol. 26, No. 2, 2002, pp. 155-164. [25] S. L. Eliseeva and S. B. Filippov, “Buckling and Vibra- tions of Cylindrical Shell of Variable Thickness with Slanted Edge,” Vestnik Sankt-Peterskogo Universiteta, In Russian, No. 3, 2003, pp. 84-91. [26] S. B. Filippov, D. N. Ivanov and N. V. Naumova, “Free Vibrations and Buckling of a Thin Cylindrical Shell of Variable Thickness with Curelinear Edge,” Technische Mechanik, Vol. 25, No. 1, 2005, pp. 1-8. [27] A. L. Goldenveizer, “Theory of Thin Shells,” Pergamon Press, New York, 1961. [28] V. V. Novozhilov, “The Theory of Thin Elastic Shells,” P. Noordhoff Ltd., Groningen, 1964. [29] R. Uhrig, “Elastostatik und Elastokinetik in Matrizen- schreibweise,” Springer-Verlag, Berlin, 1973. [30] A. Tesar and L. Fillo, “Transfer Matrix Method,” Kluwer Academic, Dordrecht, 1988. [31] M. Khalifa, “A Study of Free Vibration of a Circumfe- rentially Non-Uniform Cylindrical Shell with a Four Lobed Cross Section,” In Press, Journal of Vibration and Control, 2010. |