Paper Menu >>
Journal Menu >>
 Journal of Software Engineering and Applications, 2011, 4, 161-171 doi:10.4236/jsea.2011.43018 Published Online March 2011 (http://www.SciRP.org/journal/jsea) Copyright © 2011 SciRes. JSEA 161 A Design of a PID Self-Tuning Controller Using LabVIEW Mohammad A. K. Alia, Tariq M. Younes, Shebel A. Alsabbah Mechatroncis Engineering Department, Faculty of Engineering Technology, Al-Balqa Applied University, Amman, Jordan. Email: makalalia2000@yahoo.com, tariqmog@hotmail.com, shebel_asad@hotmail.com Received February 20th, 2011; revised March 5th, 2011; accepted M ar c h 9 th, 2011. ABSTRACT In this paper a trial has been made to design a simple self-tuning LabVIEW-based PID controller. The controller uses an open –loop relay test, calculates the tuned parameters in an open loop mode of operation before it updates control- ler parameters and runs the process as a closed-loop system. The controller reacts on a persistent offset error value as a result of load disturbance or a set point change. Practical results show that such a controller may be recommended to control a variety of industrial processes. A GUI was developed to facilitate control-mode selection, the setting of con- troller parameters, and the display of control system variables. GUI makes it possible to put the controller in manual or self-tuning mo de. Keywords: PID Control, Manual Tuning, Self-Tuning, Open-Loop Relay Test, Process Variable, System Offset Error 1. Introduction Proportional integral derivative (PID) control method (algorithm) has been the most popular control method, which is widely used in control engineering. From an au- tomation perspective, PID is more than enough for 99% of control situations. It is well known that a great many systems have very simple dynamics and in these situa- tions PID is often sufficient to provide the performance needed. Many industrial control loops that are nonlinear to some degree are linear enough in the control region near the set point for which PID co ntrol algorithm works fine. PID controllers can be more intuitive to tune. For example it is easier to reason out the expected behavior while changing one of the PID gains than pole placement option. There are many advantages of PID’s such as their simplicity and possibility of coupling PID algorith m with smith predicator, feed-forward loops, nonlinear gain sch- eduling and other advanced control techniques [1,2]. PID controllers have some drawbacks that limit their effectiveness. One of the current difficulties with PID controllers is the gain tuning. Although there are auto- tuning algorithms available yet an experienced engineer is still required to fine tune the co ntroller and ensure sys- tem stability. In the majority of cases PID tuning invol- ves trial, (and) error and direct intervention o f the opera- tor during the tuning process particularly during distur- bance tuning when it is not always obvious whether the process variable is reacting to the control effort or to ad- ditional disturbances or measurement noise [3-5]. An- other drawback of PID controllers is that process dyna- mics might change over time. This can happen due to va- riation of (changes of) the process load, and normal wear and tear. To compensate for process behavior change o ver time, expert users are requ ired to recalibrate the PID gain s. This drives up costs for labor and down time. In order to eliminate the need for operator intervention, it is recom- mended that control tuning be enabled when the process variable begins a limit cycle [6,7], which may be detected easily, also it contains enough information for determin- ing a new set of controller parameters. This is what we are going to do . 2. Basic Idea and Design Considerations The target of this work is to design a LabVIEW–based self-tuning PID controller and to verify its performance using a process flow-rate trainer which exists at the la- boratory of process control. For this purpose an ISA standard form of PID algorithm was designed. In order to eliminate the effect of external noise on measurement, a low pass fifth order filter (FIR) is used. For controller to react on the controlled system error only, and to avoid flattering, the controller initiates the tuning process only  A Design of a PID Self-Tuning Controller Using LabVIEW Copyright © 2011 SciRes. JSEA 162 after the existence of an error for a predetermined time interval. In order to realize the required time delay a spe- cific ON- delay timer was designed in compliance with the concept of data flow programming [8]. The On-delay timer is illustrated in Figure 1. The range of set point is (0-2) V while the controller output range is (0-10) VS. In order to avoid problems associated with closed-loop tuning [4-5], the controller applies an open-loop set point relay test by forcing the process variable into a series of sustained oscillations known as a limit cycle. The operator has the choice to se- lect the appropriate number of oscillations. In order to obtain more tuning accuracy it is preferred to increase the number of oscillations and take the average (TU). Once the parameter settings have been loaded into the PID for- mula, the controller is returned to the automatic mode . In this connection we should refer to the basic difference between the designed self-tuning controller and the auto- tuning controller toolkit of LabVIEW [9]. We do not use a wizard and human intervention is excluded more over we apply an automatic open-loop tuning procedure inst- ead of closed-loop tuning. 3. PID Self-Tuning VI Flowchart Figure 2 shows the flow chart. When the VI runs it reads the data from the analog input and filters the process va- riable. If the auto-tuning is activated by the auto-tuning pushbutton or as a result of disturbance, the controller switches to the open-loop mode. When the system is in steady state the tuning process starts. When a limit cycle exists with the required num- ber of cycles, new PID parameters are evaluated, then PID controller parameters are updated and the auto-tuning process is stopped. If the stop pushbutton is not pressed the controller goes to next iteration, else it sends a zero output and stops. When the auto-tuning is off, the con- troller works as a normal PID controller, then it adds the required bias to its value and coerces it in range if the stop pushbutton is not pressed. 4. Description of Self-Tuning PID Controller VI 4.1. The Front Panel The front panel is shown in Figure 3. It includes the fol- lowing controls and indicators. Controls: Kp: the value of the proportiona l controller gain. Ki: the value of the integral gain. Kd: the value of the derivative gain Kd. SP: desired steady state value. Bias: the value added to controller output and when the error equals zero the ou tput equal the bias value. SS Ripple band: the accepted va lue of ripple for process variable in order to consider that steady state occurred. Relay Amplitude: the value of Sp relay. # of Cycles: the number of cycles that must occur to stop tuning. Mode: a select switch between automatic and manual mode. Manual Control: the value to send at manual mode. Manual: makes automatic to manual modes change. Auto Tuning: starts auto-tuning operation. Stop: the abort push button. Indicators: PV: the current value of process variable. Error: the value of subtracting current PV from SP. Out: the value of current controller output in volt. 4.2. The Block Diagram The block diagram is shown in Figure 4. It includes the PID auto-tuning (all features) SubVI, Filtering and smoo- thing wave form SubVI, and the waveform values aver- age SubVI. The hierarchy of the VI is shown in F igure 5. The PID auto-tuning (all features) SubVI is shown in Figure 6. It includes the following SubVIs: 4.2.1. Restart Response VI It sends zero volt as a controller output when it is enabled. When the process variable (PV) becomes zero the pro- cess starts again. The block diagram is given in Figure 7. 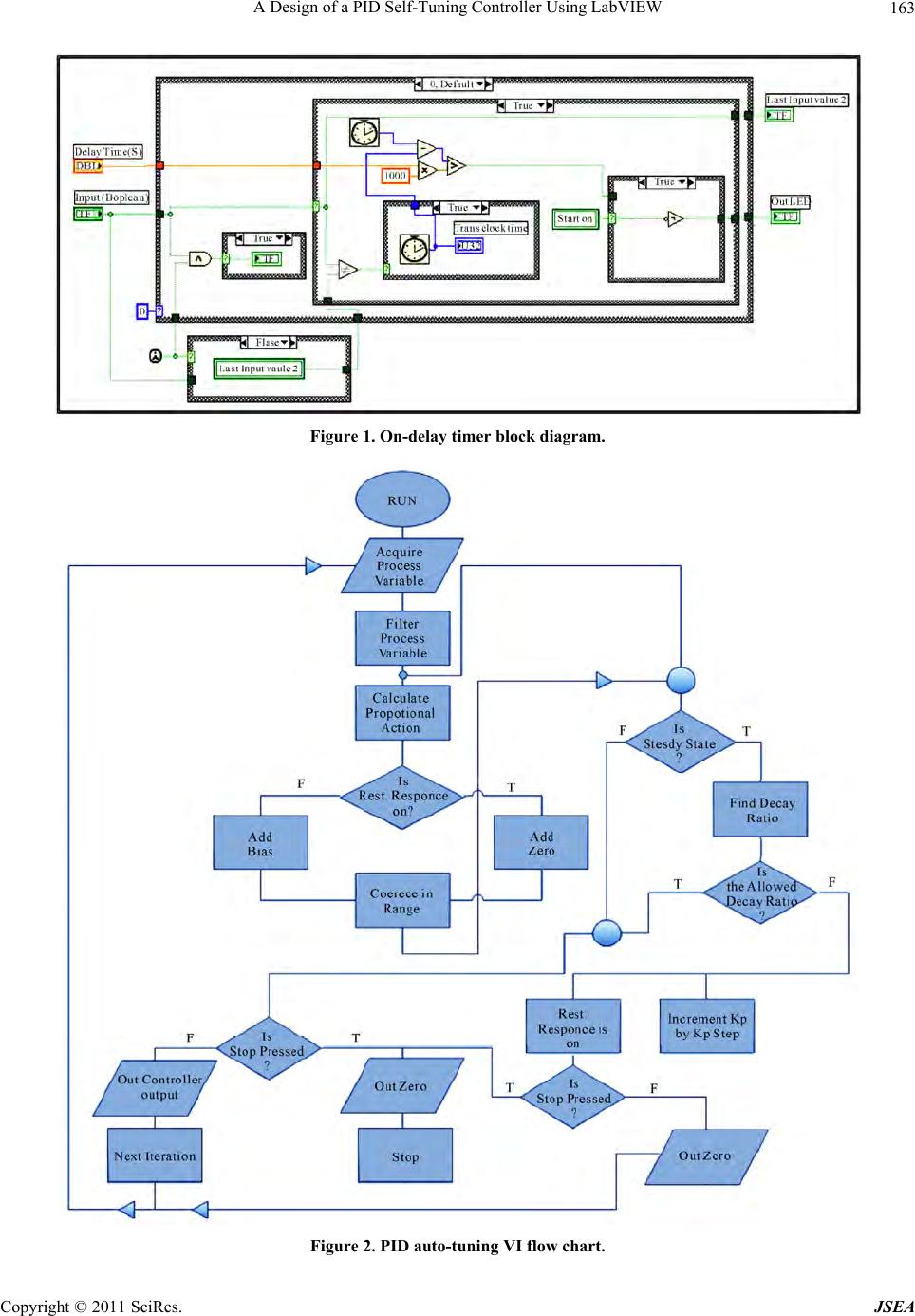 A Design of a PID Self-Tuning Controller Using LabVIEW Copyright © 2011 SciRes. JSEA 163 Figure 1. On-delay timer block diagram. Figure 2. PID auto-tuning VI flow chart. 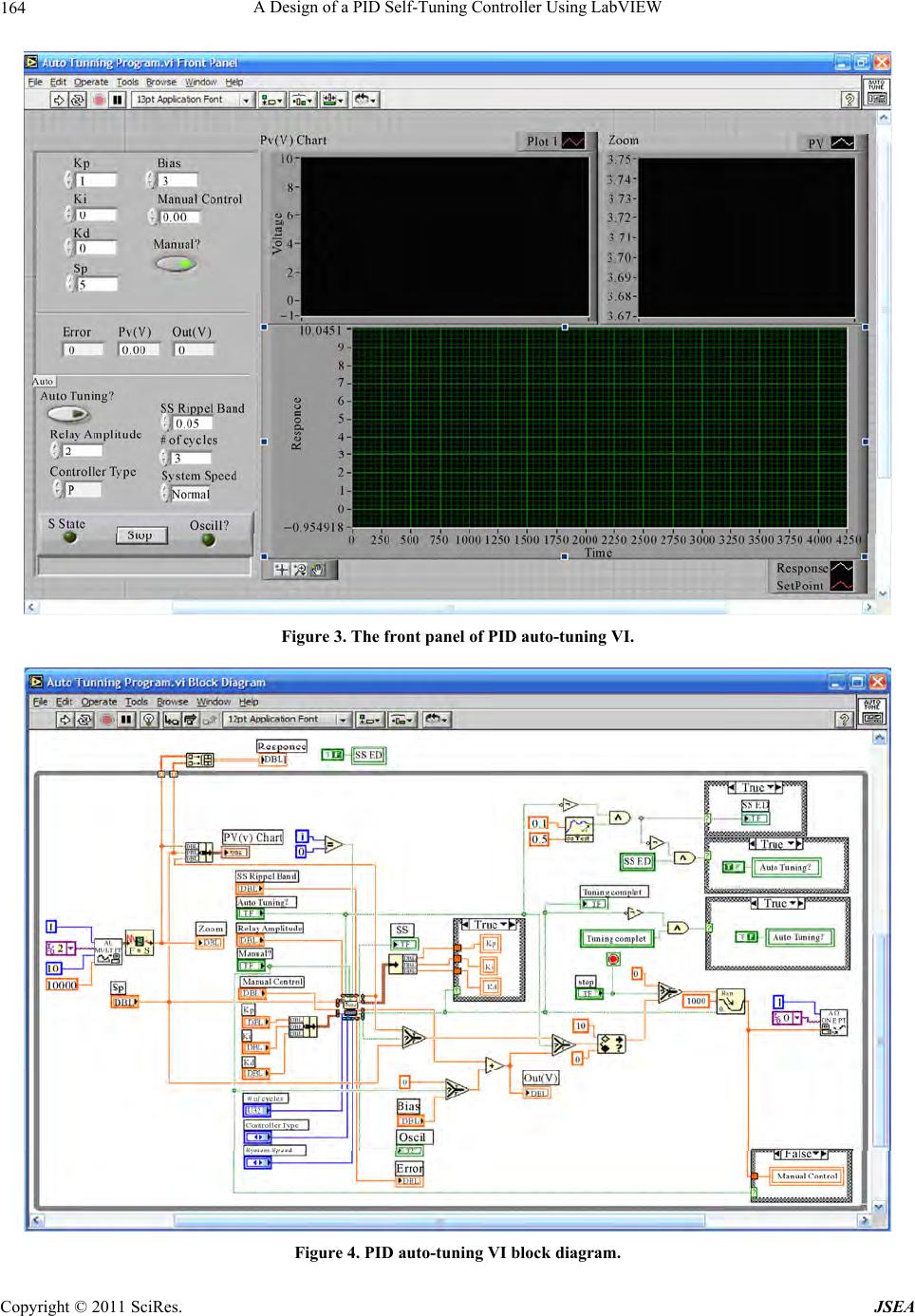 A Design of a PID Self-Tuning Controller Using LabVIEW Copyright © 2011 SciRes. JSEA 164 Figure 3. The front panel of PID auto-tuning VI. Figure 4. PID auto-tuning VI block diagram. 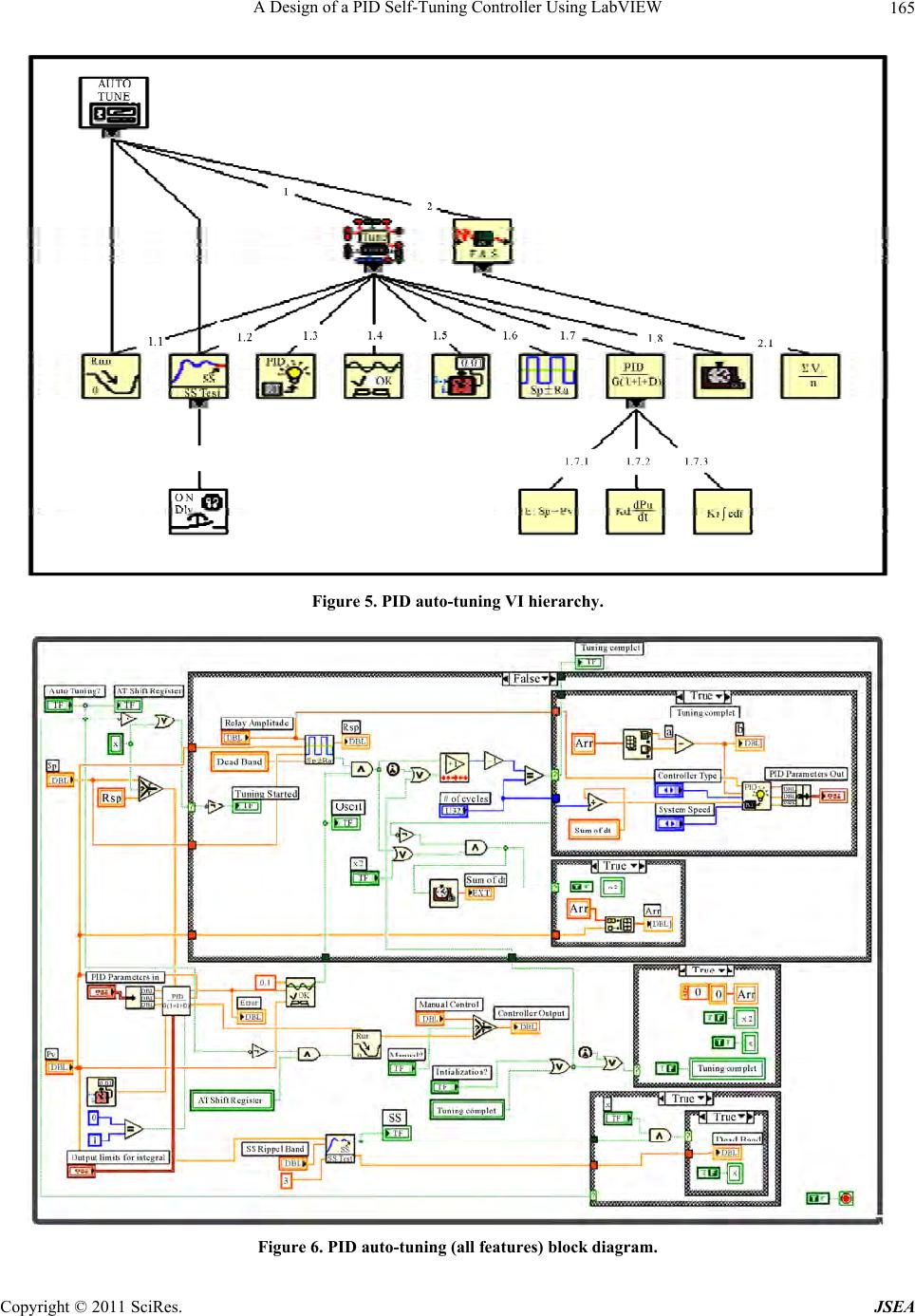 A Design of a PID Self-Tuning Controller Using LabVIEW Copyright © 2011 SciRes. JSEA 165 ∫ Figure 5. PID auto-tuning VI hierarchy. Figure 6. PID auto-tuning (all features) block diagram. 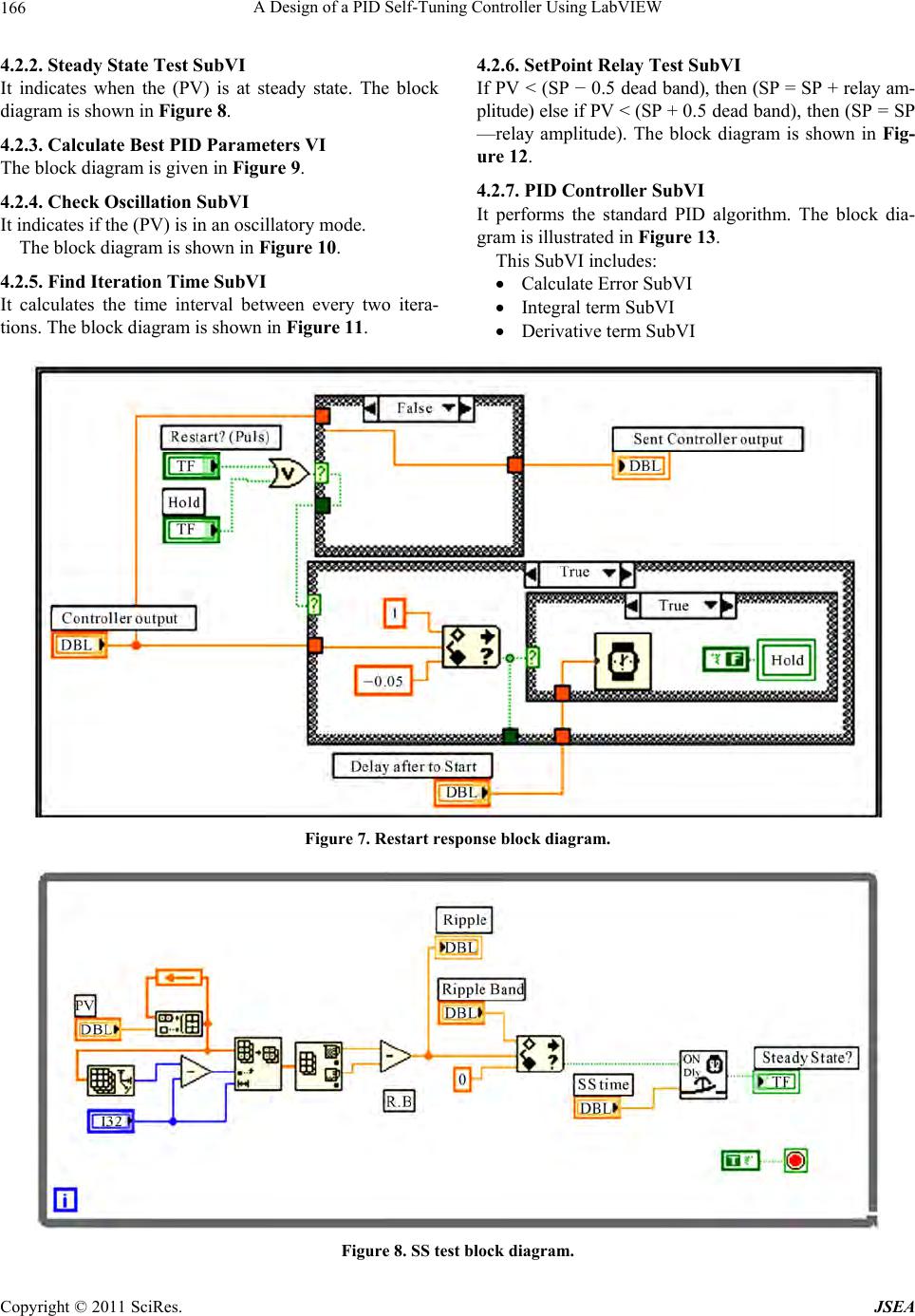 A Design of a PID Self-Tuning Controller Using LabVIEW Copyright © 2011 SciRes. JSEA 166 4.2.2. Ste ady State Test SubVI It indicates when the (PV) is at steady state. The block diagram is shown in Figure 8. 4.2.3. Calculate Best PID Parameters VI The block diagram is given in Figure 9. 4.2.4. Check Oscillation SubVI It indicates if the (PV) is in an oscillatory mode. The block diagram is shown in Figure 10. 4.2.5. Find Iteration Time SubVI It calculates the time interval between every two itera- tions. The block diagram is shown in Figure 11. 4.2.6. SetPoint Relay Test SubVI If PV < (SP − 0. 5 dea d band), then (SP = SP + relay am- plitude) else if PV < (SP + 0.5 dead band), then (SP = SP —relay amplitude). The block diagram is shown in Fig- ure 12. 4.2.7. PID Controller SubVI It performs the standard PID algorithm. The block dia- gram is illustrated in Figure 13. This SubVI includes: Calculate Error SubVI Integral term SubVI Derivative term SubVI Figure 7. Restart response block diagram. Figure 8. SS test block diagram. 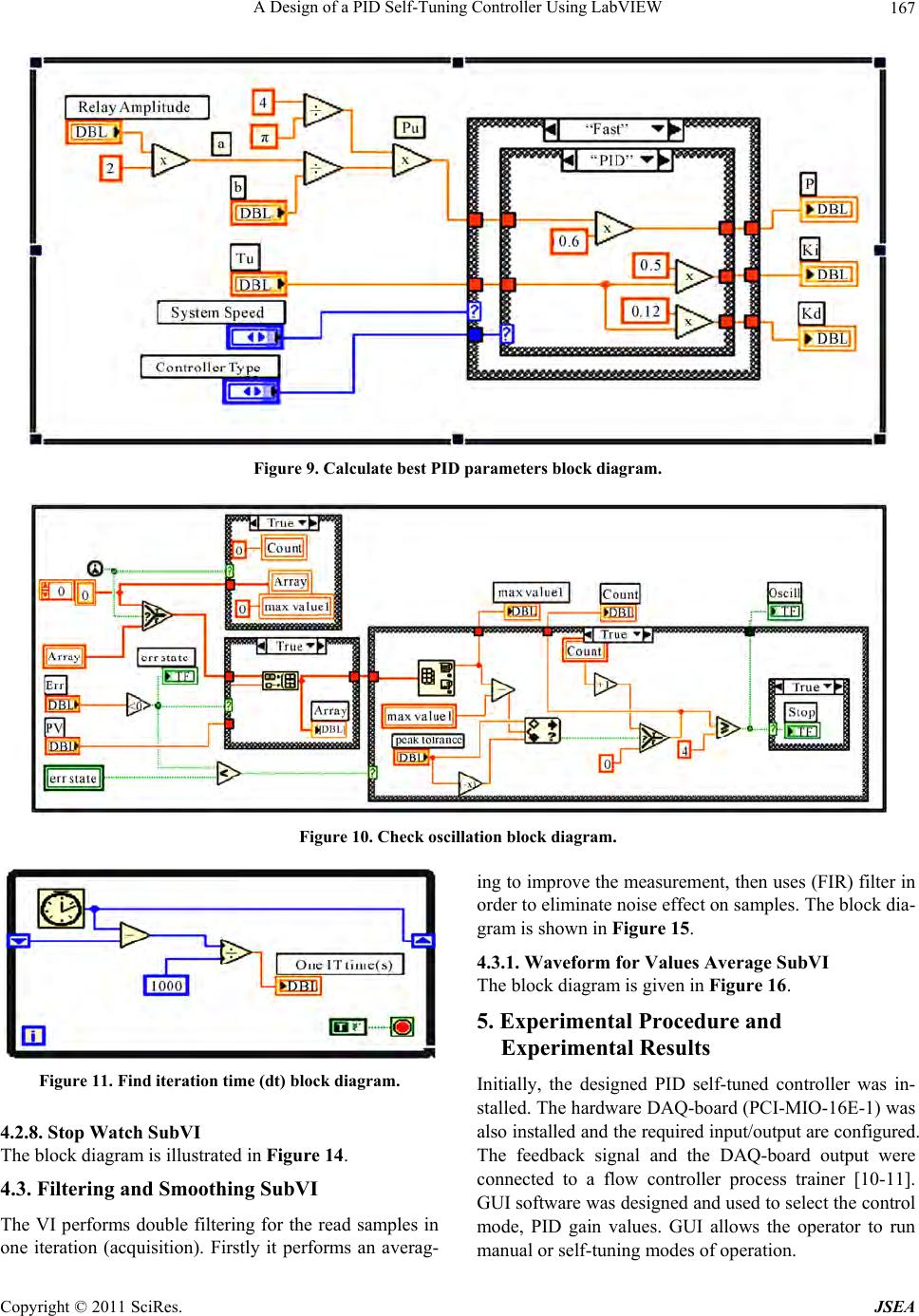 A Design of a PID Self-Tuning Controller Using LabVIEW Copyright © 2011 SciRes. JSEA 167 Figure 9. Calculate best PID parameters block diagram. Figure 10. Check oscillation block diagram. Figure 11. Find iteration time (dt) block diagram. 4.2.8. Stop W atch SubVI The block diagram is illustrated in Figure 14. 4.3. Filtering and Smoothing SubVI The VI performs double filtering for the read samples in one iteration (acquisition). Firstly it performs an averag- ing to improve the measurement, then u ses (FIR) filter in order to eliminate noise effect on samples. The block dia- gram is shown in Figure 15. 4.3.1. Waveform for Value s Average SubVI The block diagram is given in Figure 16. 5. Experimental Procedure and Experimental Results Initially, the designed PID self-tuned controller was in- stalled. The hardware DAQ-board (PCI-MIO-16E-1) was also installed an d the required inp ut/output are co nfigured. The feedback signal and the DAQ-board output were connected to a flow controller process trainer [10-11]. GUI software was designed and used to select the control mode, PID gain values. GUI allows the operator to run manual or self-tuning modes of operation. 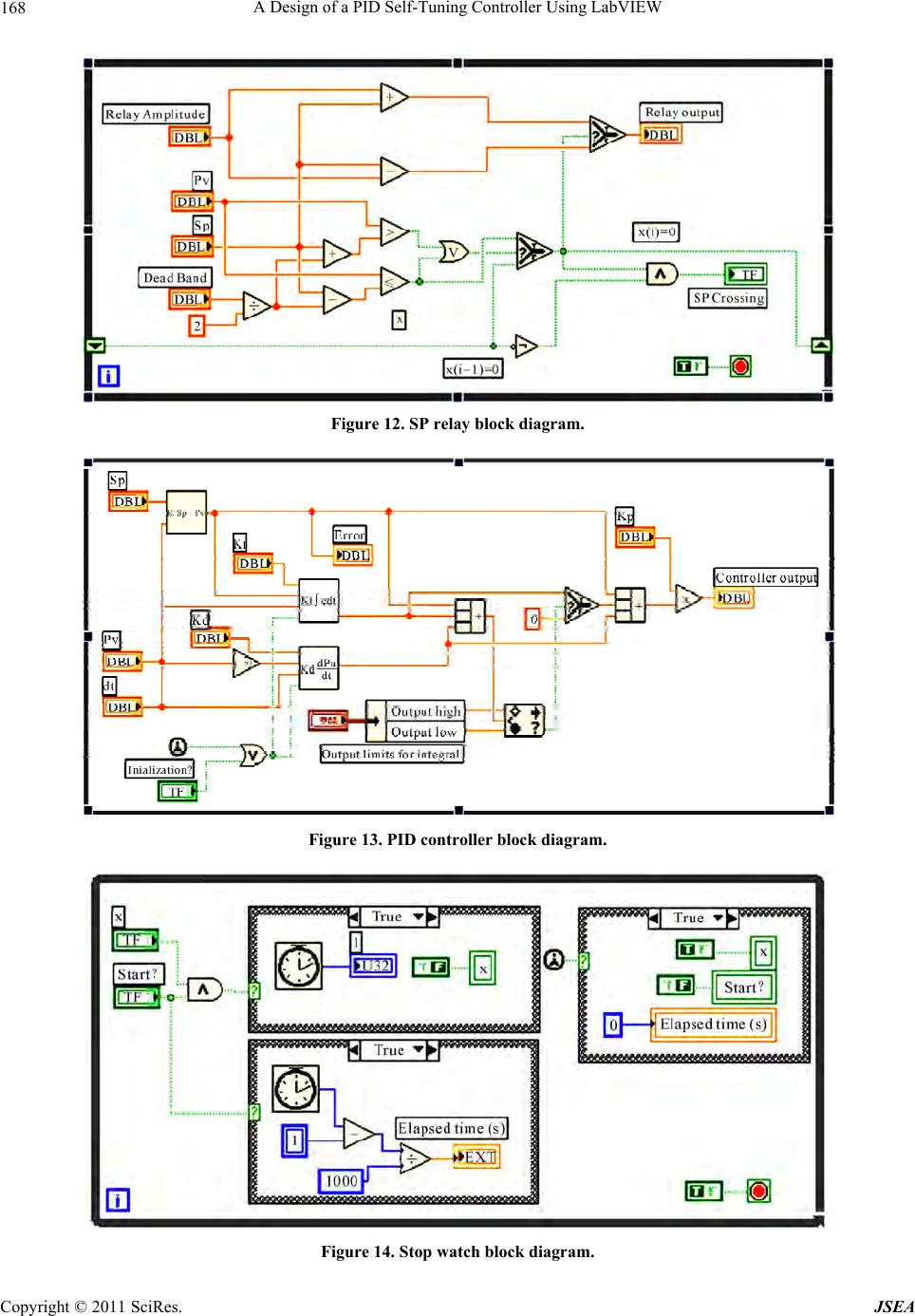 A Design of a PID Self-Tuning Controller Using LabVIEW Copyright © 2011 SciRes. JSEA 168 Figure 12. SP relay bloc k diagr a m. ∫ Figure 13. PID controller block diagram. Figure 14. Stop watch bloc k diagr a m. 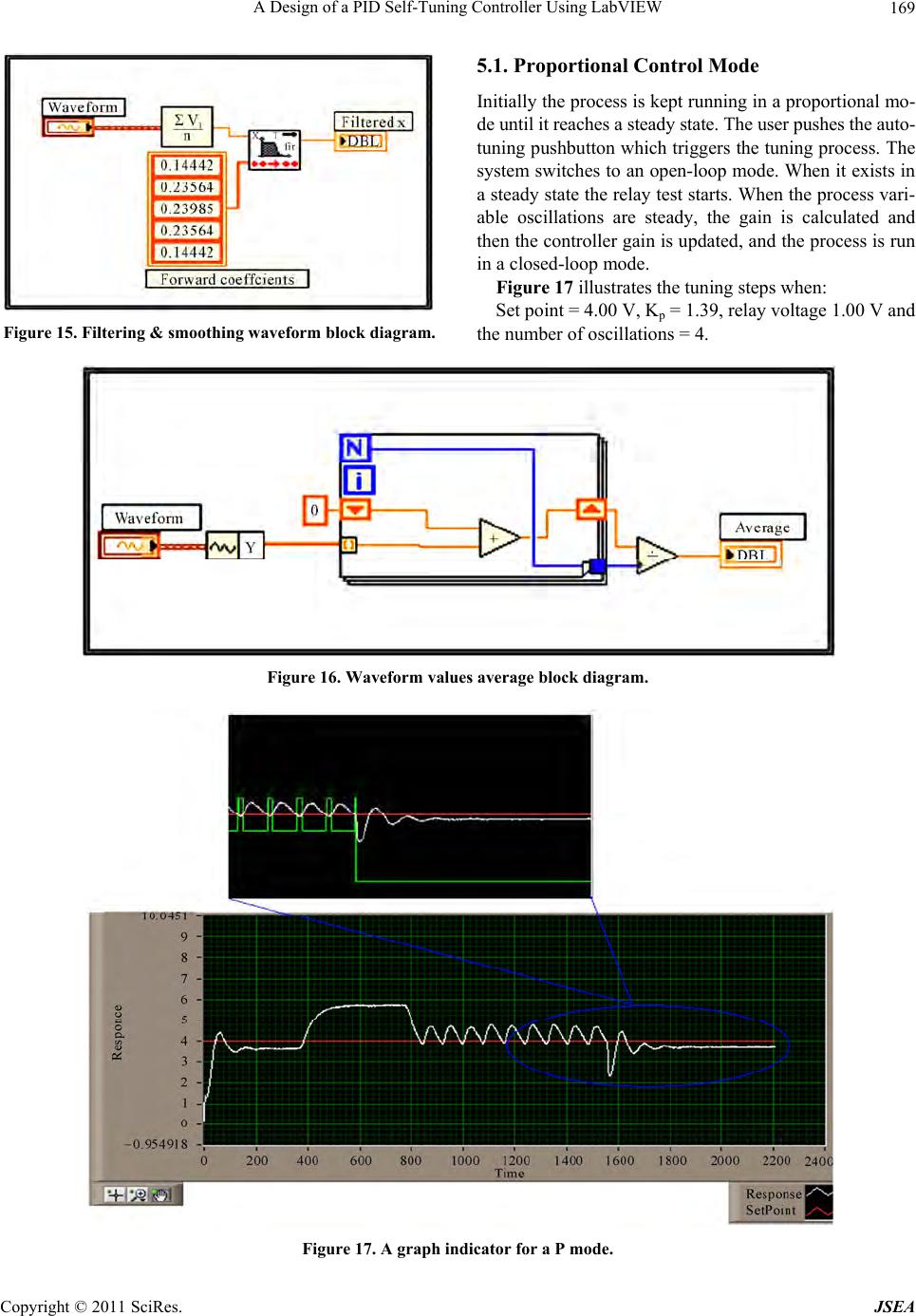 A Design of a PID Self-Tuning Controller Using LabVIEW Copyright © 2011 SciRes. JSEA 169 Figure 15. Filtering & smoothing waveform block diagram. 5.1. Proportional Control Mode Initially the process is kept ru nning in a proportio nal mo- de until it reaches a steady state. The user pushes the auto- tuning pushbutton which triggers the tuning process. The system switches to an open-loop mode. When it exists in a steady state the relay test starts. When the process vari- able oscillations are steady, the gain is calculated and then the controller gain is updated, and the process is run in a closed-loop mode. Figure 17 illustrates the tuning steps when : Set point = 4.00 V, Kp = 1.39, relay voltage 1.00 V and the number of oscillations = 4. Figure 16. Waveform values average block diagram. Figure 17. A graph indicator for a P mode. 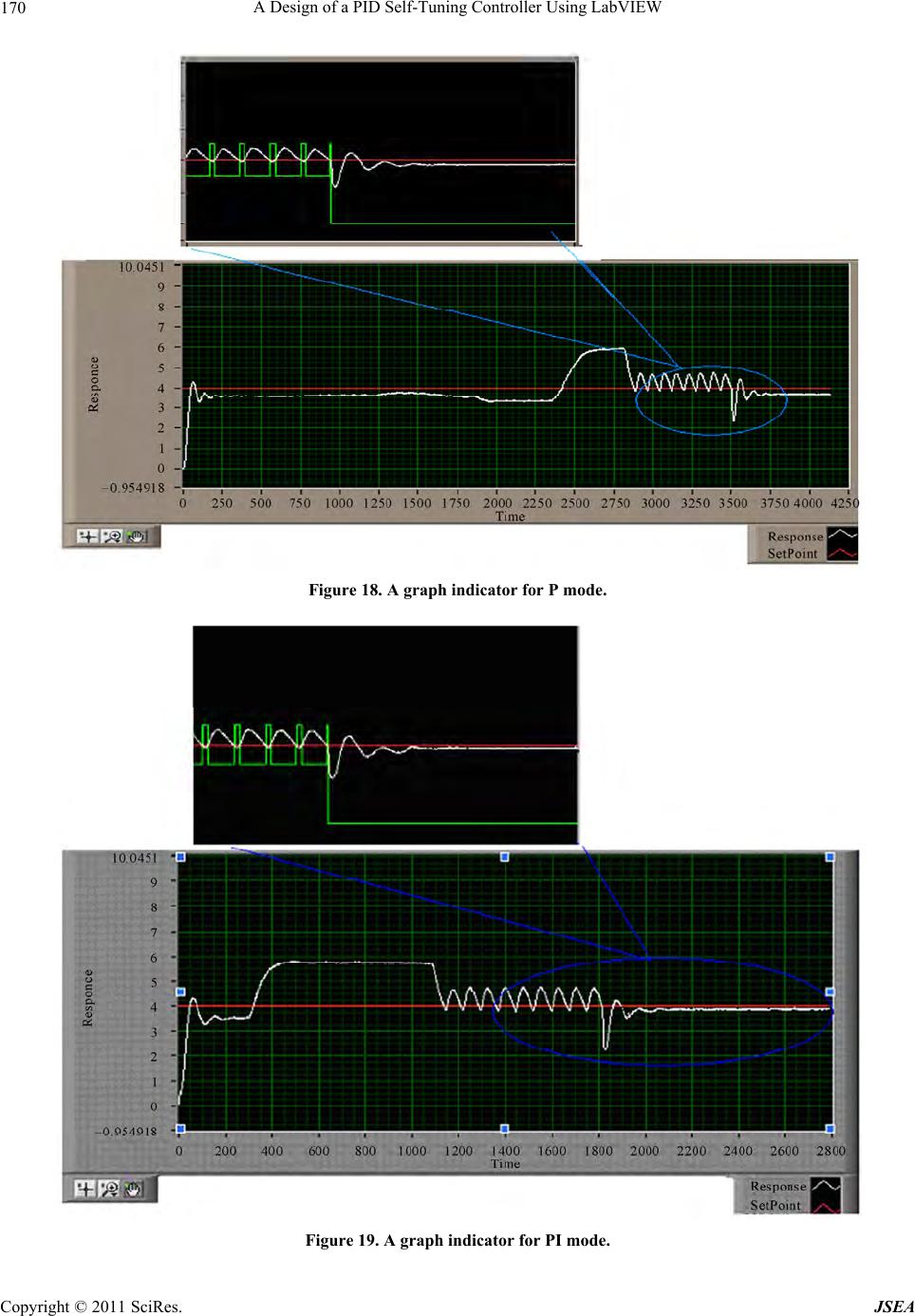 A Design of a PID Self-Tuning Controller Using LabVIEW Copyright © 2011 SciRes. JSEA 170 Figure 18. A graph indicator for P mode. Figure 19. A graph indicator for PI mode.  A Design of a PID Self-Tuning Controller Using LabVIEW Copyright © 2011 SciRes. JSEA 171 Figure 20. A graph indicator for PID mode. Figure 18 shows a self-tuning process, when the sys- tem was subjected to a disturbance from the load side. The tuned gain value was found (Kp = 1.42). 5.2. PI and PID Control Modes Tuning steps are the same as in proportional contro l mo- de. Figure 19 shows the tuning for a PI controller when Set point = 4.00 V, Kp = 1.09, KI = 0.67. Figure 20 shows the tuning process of a PID control- ler when: Setpoint = 4.00 V, Kp = 1.77, KI = 0.83 and Kd = 0.19. 6. Conclusions Using LabVIEW software a self-tuning PID controller was designed and tested to control the water flow rate. The designed controller may be considered as a devel- opment to auto-tuning toolkit of labVIEW. The controller includes a standard PID controller with the required SubVIs which enables an open-loop self- tuning process without operator intervention. A manual tuning option is also av ailable. REFERENCES [1] “Advanced Features in PID Tuning Development Library 2006,” National Instruments USA. [2] “Improving PID Controller Performance,” Development zone National Instruments USA. [3] V. Van Doren, “Fundamentals of Self-Tuning Control,” Control Engineering, Vol. 54, No. 7, July, 2007. [4] V. Van Doren, “Applications of Self-Tuning Control,” Control Engineering, Vo l . 54, N o . 9 , Jul y, 2007 . [5] V. Van Doren, “Auto-Tuning Using Ziegler-Nicholas,” Control Engineering, Vo l . 5 3 , No. 1 0 , 2006. [6] D. I. Wilson, “Relay-Based PID Tuning,” Automation and Control, Auckland University of Technology, New Zeland, February-March 2005, pp. 10-11. [7] K. J. Astrom and Wittenmark, “Adaptive Control,” Ad- dison-Welsey Publishing Company Inc., Massacusttes, USA. [8] G. W. Johnson, “LabView Graphical Programming,” MCGarw-Hill, Inc., 2006, New York. [9] “PID Contol Toolkit Manual,” National Instruments, 2006. http://www.ni.com. [10] “Flow Rate and Level Control Trainer (with DDC Con- troller under CASSY Lab),” LEYBOLD DIDACTIC GMBH, LEYBOLD DIDACTIC Company, Germany. [11] E. D. Bolat, Y. Bolat and K. Erkan, “Temperature Control Using Improved Auto-Tuning PID Control Methods,” Kocaeli Unversity, Istanbul, 1999. |