Paper Menu >>
Journal Menu >>
 Journal of Software Engineering and Applications, 2011, 4, 156-160 doi:10.4236/jsea.2011.43017 Published Online March 2011 (http://www.SciRP.org/journal/jsea) Copyright © 2011 SciRes. JSEA Sensor Robot Planning in Incomplete Environment Shan Zhong1, Zhihua Yin2, Xudong Yin1, Yufeng Yao1 1Computer Science and Engineering College, Changshu Institute of Technology, Changshu, China; 2School of Computer Science and Telecommunication Engineering, Jiangsu University, Zhenjiang, China. Email: sunshine620@cslg.edu.cn Received February 15th, 2011; revised March 5th, 2011; accepted March 8th, 2011. ABSTRACT Aiming at the former formalized methods of robot planning should give the environment state, can not obtain the new knowledge of the environment. In order to improve the reason ability for obtaining new knowledge of the environment state, the actions in the process of planning such as external action and sensing action are formalized. A formalized reasoning method—CPNI (Colored Petri Net for Planning in incomplete environment) based on two kinds of actions is proposed, and the reasoning rule as Fluent Calculus in incomplete environment is applied. Robot planning experiment is modeled and simulated by using the tool CPNTools and the result shows the state knowledge of the door and the action sequence to reach the goal can be generated automatically in the CPNI net system. Keywords: Sensor, Robot Planning, Colored Petri Net, Action Sequence 1. Introduction Robot planning [1] is the behavior planning process to reach the goal, it mainly includes two problems: generate the action sequence to reach the goal, and obtain the dy- namic knowledge in the process of reasoning. Petri net [2-3] is a formalized description tool and sui- table model for modeling the system characterized by synchronism, dynamics, concurrency. Silva [4] converted the planning graph to the acylic Petri net to plan, but can not represent the incomplete state knowledge. Vittorio [5] introduced a method for robot planning based on Petri net, formally describing actions and the relations between the actions, but it lacks the formal description for the state including the environment state and robot state, can not generate automatically the action sequence to the goal, and also can not represent the incomplete knowledge. The above work can not realize the robot planning, na- mely, automatically generate the action sequence to the goal and obtain the knowledge in the process of the rea- soning, finally realizing robot planning in incomplete en- vironment. In this paper, the sensor is introduced into the robot, converting the process of sensing the state to the sensing action of the according CPNI net system, through the sensing action, the robot can get the new knowledge of the world state, realizing the representation of the dyna- mic and unknown environment and then reasoning in an incomplete environment. The Fluent Calculus [6-7], sen- sing action and the external action are introduced to the generating algorism of the CPNI net system, the gene- rated CPNI net system can not only realize robot plan- ning and also the dynamic knowledge of the robot rea- soning. 2. Reasoning Rule and the Example 2.1. Fluent Calculus As for the Fluent Calculus, all changes to the world can be the result of named actions. A possible state history is a sequence of actions to reach the goal called situation. Fluent is for representation of the atomic properties of the physical world. The function State(s) denotes the state in situation s, which links the two key notions named state and situation. Precondition axioms are used to formally specify the circumstances under which an action is possible in a state in situation s, denoted by predicate Poss (a, state(s)) sho- wed in Equation (1), which means at the state state(s), the action A(x) can be executed. The , A x z as a pure state axiom about z is the conjunction of the conditions under which the action can be happened. , A PossAxx z (1) State update axioms defines the effects of an action a as the difference between the state prior to the action,  Sensor Robot Planning in Incomplete Environment Copyright © 2011 SciRes. JSEA 157 State(s), and the successor State(Do(a, s)), showed in Equation (2), in which , x z is the pure state axiom representing the current state, v (the positive effect) represents the adding states, while v (the negative effect) represents the removed states, and state(s) re- presents the unchanged states and the unknown states. ,, , PossAxsx States StateDoA xsState svv (2) 2.2. Example for Fluent Calculus The robot example is showed as Figure 1. The round re- presents the robot. There are four rooms such as R501, R502, R503, R504, and alley. Every neighbor room is connected by a door, and the door also connects the nei- ghbor room and alley, for example, D12 connects room R501 and room R502, and DA2 connects Alley and room R502. The actions which the robot can do are as follows: go (door), enter(room) and open(door), the precondition axi- om and the state update axiom are as follows: 1) The action go(x) means robot goes to the door x. The constraint is the door x’ which the robot currently at is different from the goal door x, the constraint can be defined in the guard function of the transition. The pre- condition axiom and the state update axioms will be de- scribed showed in Equations (3) and (4): ,1,,_,,_PossgoxzInrAt xC xrC xr (3) The Equation (3) represents the preconditions of the action go(x), In(r)At(x') denotes the robot is at the door x’ of the room r, c(x1,r,_) represents the door x1 connects the room x1 and _. ,, , 1,,_,,_ PossgoxsHoldsIn rAtxs StateDo go xsInrAtx CxrCxrAtx Atx (4) The Equation (4) represents the successor state of action Figure 1. Robot planning in the incomplete scene . go(x), the predicate c(x',r,_) represents the unchanged state, the adding state v is represented by the predicate At(x) The removed state v is represented by the pre- dicate At(x'), and it means the robot is not at the door x’ of the room r. 2) The action enter(r) represents the robot enter the room r, the constraint is the current room r’ which agent in is different from the goal room r. The precondition axiom and the state update axioms are showed as Equa- tions (5) and (6): ,,, P ossenterrzInrAtxCx rr (5) The Equation (5) represents the precondition of the ac- tion enter(r), namely, the robot is at door x in the room r' and the door is closed. ,, , ,, Poss enterrsHolds In rAtxs StateDo enterrsIn rAtx CxrrClosedx Closedx (6) The successor state of the action enter(r) showed in Equation (6) are as follows: The adding state v is closed(x), the deleted state is closed(x). 3) The action open(x) represents opening a door. The precondition axiom and the state update axiom are sho- wed as Equations (7) and (8), respectively. ,Poss Openxzclosedxkeyx (7) The Equation (7) represents the preconditions of the action: the predicate closed(x) represents the door x is closed and the robot has the key to the door x. ,, , Poss openxsHolds Closedxs State Do openxsClosedxKeyx Closed xClosed x (8) The Equation (8) represents the state update axiom of action open(x), the adding state v is closed(x), the removed state v is closed(x). 4) The action check_true(x) and check_false(x) repre- sents sensing the state of the door. The precondition axiom and the state update axiom are showed as Equa- tions (9) and (10), respectively. _ _,Posschecktrue xcheckfalse xz closedxclosed x (9) The Equation (9) shows the precondition of the action check_true(x) and check_false(x) is that robot do not know the state of door x. 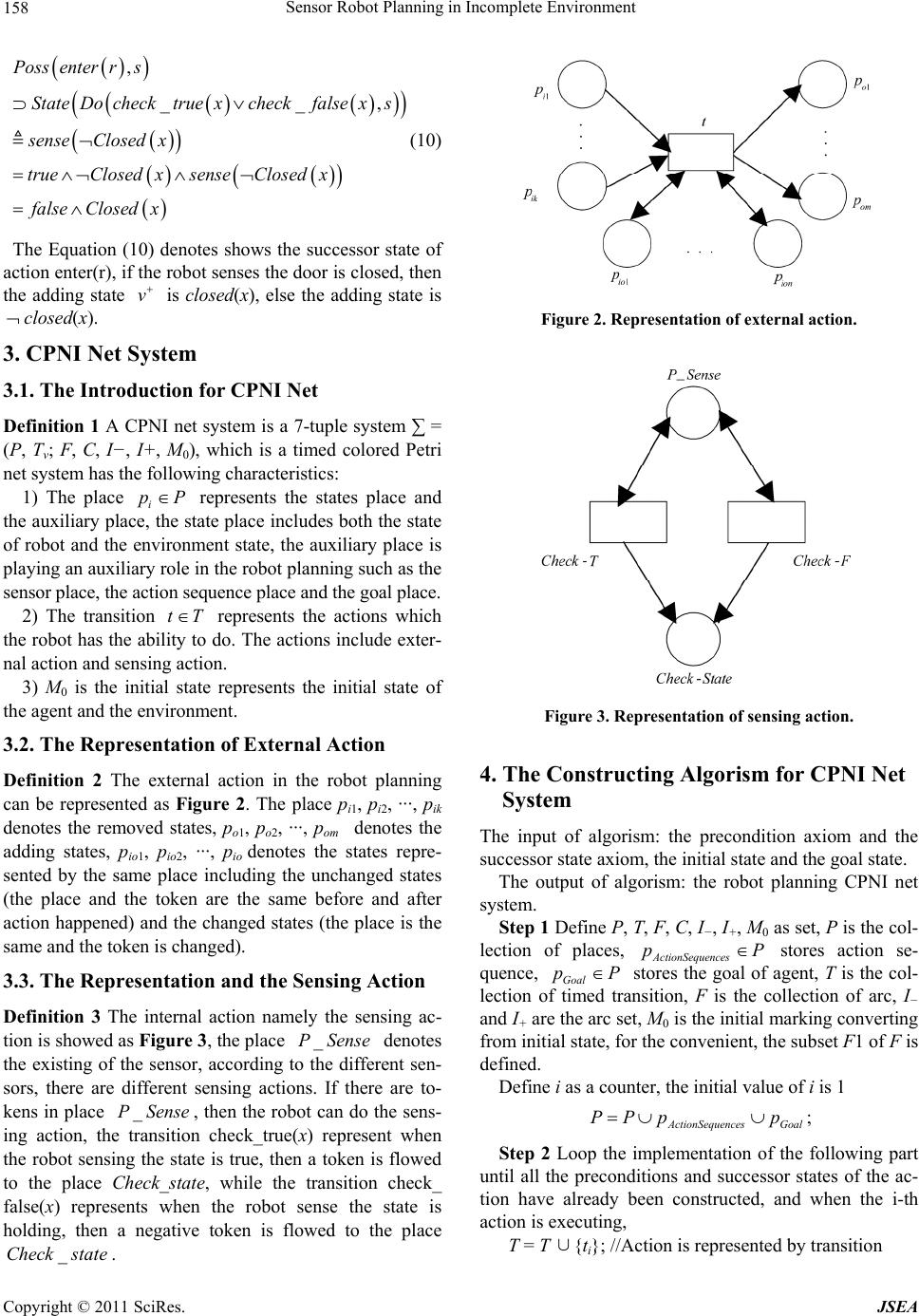 Sensor Robot Planning in Incomplete Environment Copyright © 2011 SciRes. JSEA 158 , _ _, Poss enterrs StateDo checktruexcheckfalsexs senseClosedx trueClosed xsenseClosed x falseClosed x (10) The Equation (10) denotes shows the successor state of action enter(r), if the robot senses the door is closed, then the adding state v is closed(x), else the adding state is closed(x). 3. CPNI Net System 3.1. The Introduction for CPNI Net Definition 1 A CPNI net system is a 7-tuple system ∑ = (P, Tv; F, C, I−, I+, M0), which is a timed colored Petri net system has the following characteristics: 1) The place i pP represents the states place and the auxiliary place, the state place includes both the state of robot and the environment state, the auxiliary place is playing an auxiliary role in the robot planning such as the sensor place, the action sequence place and the goal place. 2) The transition tT represents the actions which the robot has the ability to do. The actions include exter- nal action and sensing action. 3) M0 is the initial state represents the initial state of the agent and the environment. 3.2. The Representation of External Action Definition 2 The external action in the robot planning can be represented as Figure 2. The place pi1, pi2, ···, pik denotes the removed states, po1, po2, ···, pom denotes the adding states, pio1, pio2, ···, pio denotes the states repre- sented by the same place including the unchanged states (the place and the token are the same before and after action happened) and the changed states (the place is the same and the token is changed). 3.3. The Representation and the Sensing Action Definition 3 The internal action namely the sensing ac- tion is showed as Figure 3, the place _PSense denotes the existing of the sensor, according to the different sen- sors, there are different sensing actions. If there are to- kens in place _PSense, then the robot can do the sens- ing action, the transition check_true(x) represent when the robot sensing the state is true, then a token is flowed to the place Check_state, while the transition check_ false(x) represents when the robot sense the state is holding, then a negative token is flowed to the place _Checkstate . Figure 2. Representation of external action. Figure 3. Representation of sensing action. 4. The Constructing Algorism for CPNI Net System The input of algorism: the precondition axiom and the successor state axiom, the initial state and the goal state. The output of algorism: the robot planning CPNI net system. Step 1 Define P, T, F, C, I−, I+, M0 as set, P is the col- lection of places, ActionSequences pP stores action se- quence, Goal pP stores the goal of agent, T is the col- lection of timed transition, F is the collection of arc, I− and I+ are the arc set, M0 is the initial marking converting from initial state, for the convenient, the subset F1 of F is defined. Define i as a counter, the initial value of i is 1 ActionSequences Goal PP pp ; Step 2 Loop the implementation of the following part until all the preconditions and successor states of the ac- tion have already been constructed, and when the i-th action is executing, T = T ∪{ti}; //Action is represented by transition 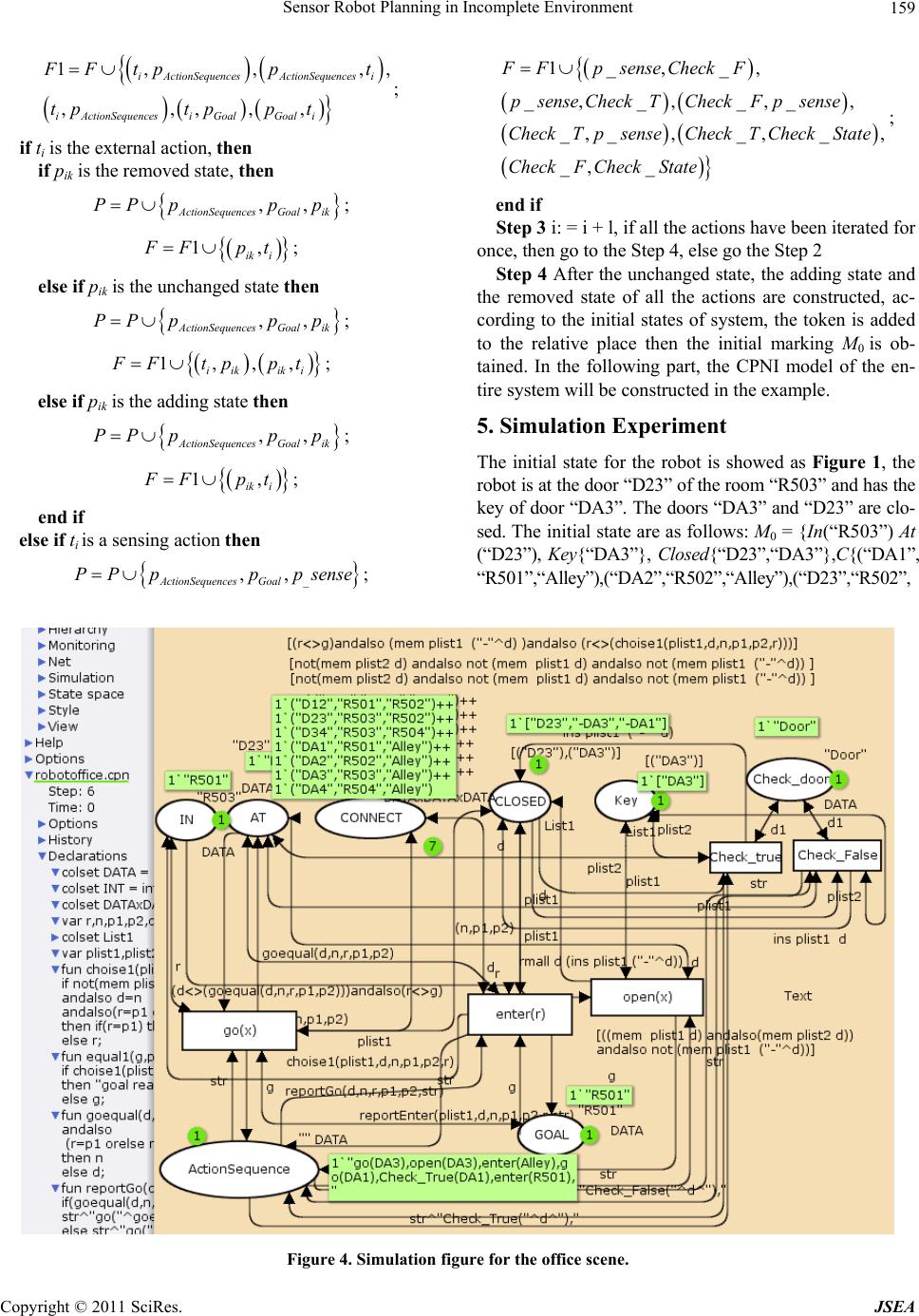 Sensor Robot Planning in Incomplete Environment Copyright © 2011 SciRes. JSEA 159 1,,,, ,,,,, iActionSequencesActionSequences i iActionSequencesiGoalGoal i F Ftpp t tptpp t ; if ti is the external action, then if pik is the removed state, then ,, ActionSequences Goal ik PP ppp ; 1, ik i F Fpt ; else if pik is the unchanged state then ,, ActionSequences Goal ik PP ppp ; 1,,, iik iki F Ftppt ; else if pik is the adding state then ,, ActionSequences Goal ik P Ppp p ; 1, ik i F Fpt ; end if else if ti is a sensing action then _ ,, ActionSequences Goal PP pppsense ; 1_, _, _, _,_,_ , _ ,_,_,_, _, _ FFpsense CheckF p senseCheckTCheckFp sense Check TpsenseCheck TCheckState CheckF CheckState ; end if Step 3 i: = i + l, if all the actions have been iterated for once, then go to the Step 4, else go the Step 2 Step 4 After the unchanged state, the adding state and the removed state of all the actions are constructed, ac- cording to the initial states of system, the token is added to the relative place then the initial marking M0 is ob- tained. In the following part, the CPNI model of the en- tire system will be constructed in the example. 5. Simulation Experiment The initial state for the robot is showed as Figure 1, the robot is at the door “D23” of the room “R503” and has the key of door “DA3”. The doors “DA3” and “D23” are clo- sed. The initial state are as follows: M0 = {In(“R503”) At (“D23”), Key{“DA3”}, Closed{“D23”,“DA3”},C{(“DA1”, “R501”,“Alley”),(“DA2”,“R502”,“Alley”),(“D23”,“R502”, Figure 4. Simulation figure for the office scene. 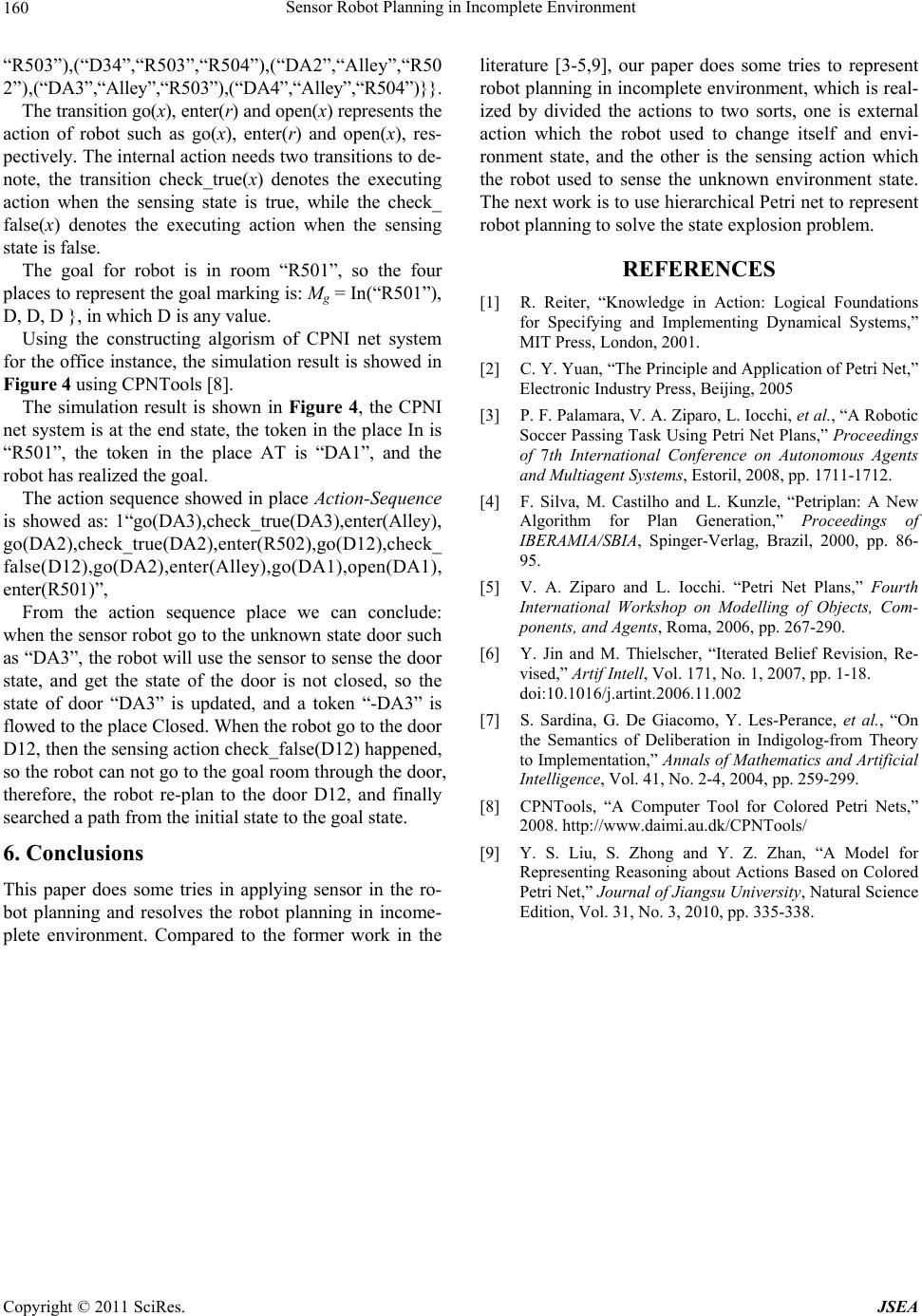 Sensor Robot Planning in Incomplete Environment Copyright © 2011 SciRes. JSEA 160 “R503”),(“D34”,“R503”,“R504”),(“DA2”,“Alley”,“R50 2”),(“DA3”,“Alley”,“R503”),(“DA4”,“Alley”,“R504”)}}. The transition go(x), enter(r) and open(x) represents the action of robot such as go(x), enter(r) and open(x), res- pectively. The internal action needs two transitions to de- note, the transition check_true(x) denotes the executing action when the sensing state is true, while the check_ false(x) denotes the executing action when the sensing state is false. The goal for robot is in room “R501”, so the four places to represent the goal marking is: Mg = In(“R501”), D, D, D }, in which D is any value. Using the constructing algorism of CPNI net system for the office instance, the simulation result is showed in Figure 4 using CPNTools [8]. The simulation result is shown in Figure 4, the CPNI net system is at the end state, the token in the place In is “R501”, the token in the place AT is “DA1”, and the robot has realized the goal. The action sequence showed in place Action-Sequence is showed as: 1“go(DA3),check_true(DA3),enter(Alley), go(DA2),check_true(DA2),enter(R502),go(D12),check_ false(D12),go(DA2),enter(Alley),go(DA1),open(DA1), enter(R501)”, From the action sequence place we can conclude: when the sensor robot go to the unknown state door such as “DA3”, the robot will use the sensor to sense the door state, and get the state of the door is not closed, so the state of door “DA3” is updated, and a token “-DA3” is flowed to the place Closed. When the robot go to the door D12, then the sensing action check_false(D12) happened, so the robot can not go to the goal room through the door, therefore, the robot re-plan to the door D12, and finally searched a path from the initial state to the goal state. 6. Conclusions This paper does some tries in applying sensor in the ro- bot planning and resolves the robot planning in income- plete environment. Compared to the former work in the literature [3-5,9], our paper does some tries to represent robot planning in incomplete environment, which is real- ized by divided the actions to two sorts, one is external action which the robot used to change itself and envi- ronment state, and the other is the sensing action which the robot used to sense the unknown environment state. The next work is to use hierarchical Petri net to represent robot planning to solve the state explosion problem. REFERENCES [1] R. Reiter, “Knowledge in Action: Logical Foundations for Specifying and Implementing Dynamical Systems,” MIT Press, London, 2001. [2] C. Y. Yuan, “The Principle and Application of Petri Net,” Electronic Industry Press, Beijing, 2005 [3] P. F. Palamara, V. A. Ziparo, L. Iocchi, et al., “A Robotic Soccer Passing Task Using Petri Net Plans,” Proceedings of 7th International Conference on Autonomous Agents and Multiagent Systems, Estoril, 2008, pp. 1711-1712. [4] F. Silva, M. Castilho and L. Kunzle, “Petriplan: A New Algorithm for Plan Generation,” Proceedings of IBERAMIA/SBIA, Spinger-Verlag, Brazil, 2000, pp. 86- 95. [5] V. A. Ziparo and L. Iocchi. “Petri Net Plans,” Fourth International Workshop on Modelling of Objects, Com- ponents, and Agents, Roma, 2006, pp. 267-290. [6] Y. Jin and M. Thielscher, “Iterated Belief Revision, Re- vised,” Artif Intell, Vol. 171, No. 1, 2007, pp. 1-18. doi:10.1016/j.artint.2006.11.002 [7] S. Sardina, G. De Giacomo, Y. Les-Perance, et al., “On the Semantics of Deliberation in Indigolog-from Theory to Implementation,” Annals of Mathematics and Artificial Intelligence, Vol. 41, No. 2-4, 2004, pp. 259-299. [8] CPNTools, “A Computer Tool for Colored Petri Nets,” 2008. http://www.daimi.au.dk/CPNTools/ [9] Y. S. Liu, S. Zhong and Y. Z. Zhan, “A Model for Representing Reasoning about Actions Based on Colored Petri Net,” Journal of Jiangsu University, Natural Science Edition, Vol. 31, No. 3, 2010, pp. 335-338. |