An Algorithm and Data Process Scheme for Indoor Location Based on Mobile Devices
OPEN ACCESS JCC
Table 1. Results comparison between KNN method and positioning algorithm based on clusters.
Method Average Error (m) Max Error (m) Accuracy/%
1 m 2 m 3 m 5 m
KNN
CNPM1 2.3
2.1 33.2
22.3 26.3
27.1 56.5
61.3 77.4
80.6 91.8
92.6
CNPM2 1.6 13.1 43.6 76.6 90.9 96.5
1) No sampling values with a weighted average of the sliding window method; 2) Sampling values with a weighted average of the sliding window method.
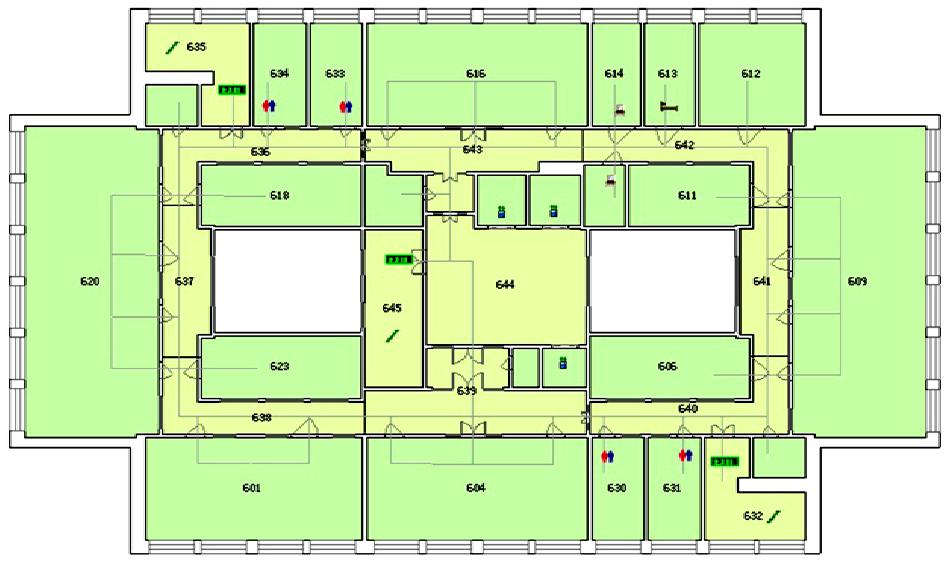
tical business indoor positioning system, therefore the
ability and stability of sampling results in them are dif-
ferent from those in other experimental environment de-
signed for ordinary indoor positioning technologies. In
many practical situations, it requires real-time position-
ing where samples are few, dropping the accuracy of
traditional positioning algorithm as well as increasing the
change variance of position with jumping points in large
range compared to in ordinary research environment. All
above has severe impact on the ability and stability of
indoor positioning system and satisfaction from the users.
Therefore this paper puts forward a new kind of method
to tackle this problem, improving the accuracy and sta-
bility of indoor positioning system in mobile devices.
It is shown that the positioning algorithm and data
processing method put forward in this paper has dramat-
ically improved the positioning accuracy or a 2-meter
precision by 20.1% from 56.5% to 76.6%; 3-meter,
13.5%, 77.4%, 90.9% ; 5-meter, 4.7%, 91.8%, 96.5%,
and reduced the average error by 0.7 m from 2.3 m to 1.6
m. In conclusion the positioning algorithm based on
cluster (CNPM) and sampling method with a weighted
average of the sliding window processing are very pro-
ductive for improvement of indoor positioning accuracy
and stability in mobile devices.
The major tasks for future research are composed of: 1)
It is suggested to study the filtering processing of sam-
pling signal in mobile devices to enhance the accuracy
and stability of real-time and quasi real time positioning
system. 2) Due to varied models and types of mobile
devices, the adaptivity of finger print map is far from
satisfying. Therefore the work to generalize the sampling
data in different kinds of equipment as to improve such
adaptivity is one of research issues in the future.
Acknowledgement
This paper is supported by a grant from the National
High Technology Research and Development Program of
China (863 Program) (No. 2012AA120802).
REFERENCES
[1] M. Weiser, “Some Computer Science Issues in Ubiquit-
ous Computing,” Communications of the ACM, Vol. 36,
No. 7, 1993, pp. 75-84.
http://dx.doi.org/10.1145/159544.159617
[2] M. Hazas, J. Scott and J. Krumm, “Location-Aware
Computing Comes of Age,” Computer, Vol. 37, No. 2,
2004, pp. 95-97.
http://dx.doi.org/10.1109/MC.2004.1266301
[3] R. Want, A. Hopper, V. Falcao and J. Gibbons, “The
Active Badge Location System,” ACM Transactions on
Information Systems, Vol. 10, No. 1, 1992, pp. 91-102.
http://dx.doi.org/10.1145/128756.128759
[4] R. Casas, “BLUPS: Bluetooth and Ultrasounds Position-
ing System,” Doctoral Dissertation, University of Zara-
goza, 2004.
[5] L. M. Ni, Y. Liu, Y. C. Lau and A. P. Patil, “Landmarc:
Indoor Location Sensing Using Active RFID,” Pervasive
Computing and Communications, 2003, pp. 407-415.
[6] P. Bahl and V. N. Padmanabhan, “RADAR: An In-
Building RF-Based User Location and Tracking System,”
IEEE INFOCOM 2000 Conference, 2000, pp. 775-784.
[7] M. Youssef and A. Agrawala, “The Horus WLAN Loca-
tion Determination System,” Proceedings of the 3rd In-
ternational Conference on Mobile Systems, Applications,
and Services, 6-8 June 2005, pp. 205-218.
[8] L. Doherty, L. Ghaoui and K. Pister, “Convex Position
Estimation in Wireless Sensor Networks,” IEEE INFO-
COM 2001 Conference, 2001, pp. 1655-1663.
[9] A. Gunther and Ch. Hoene, “Measuring Round Trip
Times to Determine the Distance between WLAN Nodes,”
Proceedings of Networking, Waterloo, May 2005.
[10] R. O. Duda and P. E. Hart, “Pattern Classification,” 2nd
Edition, John Wiley, New York, 2000.
[11] M. Youssef and A. Agrawala, “On the Optimality of
WLAN Location Determination Systems,” The Commu-
nication Network sand Distributed Systems Modeling and
Simulation Conference, 18-24 January 2004.
[12] A. S. Krishnakumar and P. Krishnan, “The Theory and
Practice of Signal Strength-Based Location Estimation,”
Collaborative Computing: Networking, Applications and
Worksharing, San Jose, 2005.
[13] B. Wen, “An Improved Method Used in Indoor Location
Based on Signal Similarity Analysis and Adaptive Algo-
rithms Selection,” Wireless Communications, Networking
and Mobile Computing 2012, 21-23 September 2012. pp.
1-6.