D. GAGLIASSO ET AL.
when multiple response variables of interest are present in the
analysis. When predicting a single variable, Eskelson et al.
(2009b) reported that parametric methods resulted in better
performance than non-parametric methods.
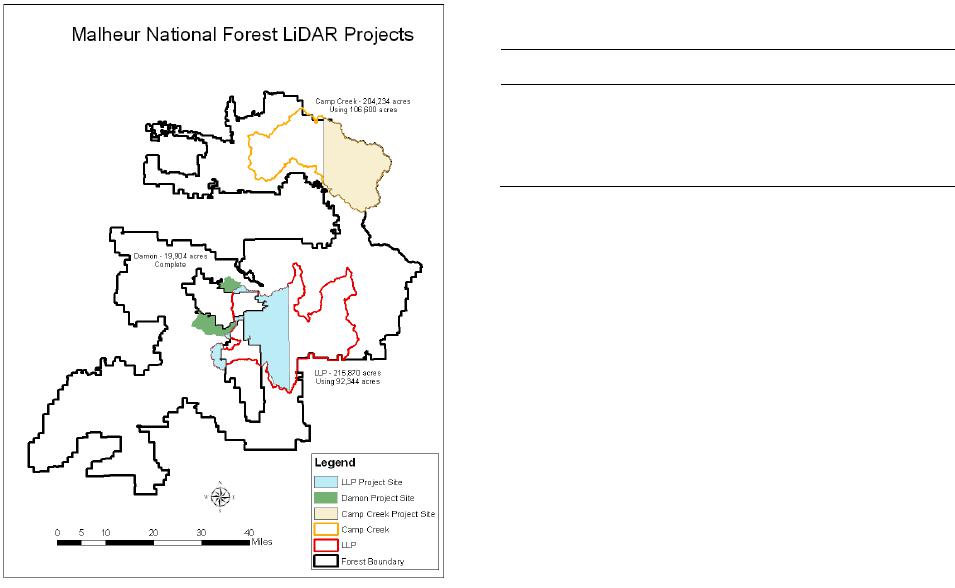
The results of this study suggest that the current method be-
ing used to implement forest management activities on the
Malheur National Forest, MSN, may not be the best method to
predict total standing tree woody biomass. Instead, the k-MSN
or RF method may be preferable, particularly if multiple re-
sponse variables are important to consider. In contrast, if users
are only interested in a single response variable, total standing
tree biomass, GWR appears more suitable.
REFERENCES
Baskerville, G. L. (1972). Use of logarithmic regression in the estima-
tion of plant biomass. Canadian Journal of Fores try, 2, 49-53.
http://dx.doi.org/10.1139/x72-009
Câmara, G., Souza, R., Freitas, U., & Garrido, J. (1996). SPRING:
Integrating remote sensing and GIS by object-oriented data modeling.
Computers and Gr aphics, 20, 395-403.
http://dx.doi.org/10.1016/0097-8493(96)00008-8
Crookston, N. L., & Finley, A. O. (2008). yaImpute: An R package for
kNN imputation. Journal of Statistical Software, 23, 1-16.
Crow, T. R., & Schlaegel, B. E. (1988). A guide to using regression
Equations for estimating tree biomass. Northern Journal of Applied
Forestry, 5, 15-22.
Eskelson, B. N. I., Temesgen , H., & Barrett, T. M. (2009a). Estimating
current forest attribu tes from paneled inventory data using plo t-level
imputation: A study from the Pacific Northwest. Forest Science, 5,
64-71.
Eskelson, B. N. I., Temesgen, H., & Barrett, T. M. (2009b). Estimating
cavity tree and snag abundance using negative binomial regression
models and nearest neighbor imputation methods. Canadian Journal
of Forest Research, 39, 1749-1765.
http://dx.doi.org/10.1139/X09-086
Fotheringham, A. S., Brunsdon , C., & Charlton, M . (2002). Geograph-
ically weighted regression: The analysis of spatially varying rela-
tionships. Chichester, Hoboken, NJ: Wiley.
Goerndt, M. E., Monleon, V. J., & Temesgen, H. (2010). Relating
forest attributes with area - and tree-based lig ht detection an d ranging
metrics for Western Oregon. Western Journal of Applied Forestry,
25, 105-111.
Hudak, A. T., Crookston, N. L., Evans, J. S., Hall, D. E., & Falkowski,
M. J. (2008). Nearest neighbor i mputation of species-level, plo t-scale
forest structure attributes from LiDAR data. Remote Sensing of En-
vironment, 112, 2232-2245. Corrigendum: (2009). Remote Sensing of
Environment, 113, 289-290.
http://dx.doi.org/10.1016/j.rse.2008.08.006
Hummel, S., Hudak, A. T., Uebler, E. H., Falkowski, M. J., & Megown,
K. A. (2011). A comparison of accuracy and cost of LiDAR versus
stand exam data for landscap e management on the Malheur Nation al
Forest. Journal of Forest r y, 109, 267-273.
Keyser, C. E., & Dixon, G. E. (2008). Blue Mountains (BM) variant
overview—Forest vegetation simulator. Internal Rep., Fort Collins,
CO: US Department of Agriculture, Forest Service, Forest Manage-
ment Service Center. (revised February 3, 2010)
Koch, B., Straub, C., Dees, M., Wang, Y., & Weinacker, H. (2009).
Airborne laser data for stand delineation and information extraction.
International Journal of Remote Sensing, 30, 935-963.
http://dx.doi.org/10.1080/01431160802395284
Maltamo, M., Malinen, J., Packalén, P., Suvanto, A., & Kangas, J.
(2006). Nonparametric estimation of stem volume using airborne la-
ser scanning, aerial photography, and stand-register data. Canadian
Journal of Forest Research, 36, 426-436.
http://dx.doi.org/10.1139/x05-246
McGaughey, R. J. (2009). FUSION/LDV: Software for LIDAR data
analysis and visualization, Version 2.9. USDA FS.
http://www.fs.fed.us/eng/rsac/fusion/
Moeur, M., & Stage, A. R. (1995). Most similar neighbor: An improved
sampling inference procedure for natural resource planning. Forest
Science, 41, 337-359.
Moisen, G. G., Edwards J r., T. C., & Cutler, D. R. (1994). Spatial sam-
pling to assess classification accuracy of remotely sensed data. In J.
Brunt, S. S. Stafford, & W. K. Michener (Eds.), Environmental in-
formation management and analysis: Ecosystem to glob al scales (pp.
161-178). Philadelphia, PA: Taylor and Francis.
Mustonen, J., Packalén, P., & Kang as, A. (2008). Automatic segmenta-
tion of forest stands using canopy height model and aerial photo-
graph. Scandinavian Journal of For est Research, 23, 534-545.
http://dx.doi.org/10.1080/02827580802552446
Ohmann, J. L., & Gregory, M. J. (2002). Predictive mapping of forest
composition and structure with direct gradient analysis and nearest-
neighbor imputation in coastal Oregon, U.S.A. Canadian Journal of
Forest Research, 32, 725-741. http://dx.doi.org/10.1139/x02-011
Næsset, E. (2004). Accuracy of forest inventory using airborne laser
scanning: Evaluating the first Nordic full-scale operation project.
Scandinavian Journal of Fores t Research, 19, 554-557.
http://dx.doi.org/10.1080/02827580410019544
Nelson, R., Short, A., & Valenti, M. (2004). Measuring biomass and
carbon in Delaware using an airborne profiling LiDAR. Scandina-
vian Journal of Forest Research, 19, 500-511.
http://dx.doi.org/10.1080/02827580410019508
R Development Core Tea m (2011). R: A language and environment for
statistical computing. Vienna: R Foundation for Statistical Compu-
ting. http://www.R-project.org/
Salas, C., Ene, L., G regoire, T. G., Næsse t, E., & Gobakken, T. (2010).
Modelling tree diameter from airborne laser scanning derived va-
riables: A comparison of spatial statistical models. Remo te Sen sin g of
Environment, 114, 1277-1285.
http://dx.doi.org/10.1016/j.rse.2010.01.020
Sullivan, A. (2008). LIDAR based delineation in forest stands. Master’s
Thesis, Seattle, WA: University of Was hington.
Temesgen, H., LeMay, V. M., Marshall, P. L., & Froese, K. (2003).
Imputing tree-lists from aerial attributes for complex stands of
south-eastern British Columbia. Forest Ecology and Management,
177, 277-285. http://dx.doi.org/10.1016/S0378-1127(02)00321-3
Thornton, P. E. (2003). DAYMET climatological summaries for aver-
age air temperature and total precip itation (18-year mean for 1980-
1997). Missoula, MT: University of Montana, Numerical Terrady-
namic Simulation Group. http://www.daymet.org
US Forest Service (2001). Region 6 inventory & monitoring system:
Field procedures for the current vegetation su rvey. Na tu ra l Resou rce
Inventory, Pacific Northwest Region. Version 2.04, Portland, OR:
USDA Forest Service.
Wang, Q., Ni, J., & Tenhunen, J. (2005). Application of a geographi-
cally-weighted regression analysis to estimate net primary production
of Chinese forest ecosystems. Global Ecology and Biogeography, 14,
379-393. http://dx.doi.org/10.1111/j.1466-822X.2005.00153.x
Wulder, M. A., Bater, C. W., Coops, N. C., Hiker, T., & White, J. C.
(2008). The role of LiDAR in sustainable forest management. The
Forestry Chronicle, 84, 807-826.
OPEN ACCESS
48