Journal of Computer and Communications, 2014, 2, 57-63
Published Online January 2014 (http://www.scirp.org/journal/jcc)
http://dx.doi.org/10.4236/jcc.2014.22011
OPEN ACCESS JCC
An Experimental System Development for Head Posture
Estimation Based on 3-D Images Measurement
Chen Xu, Cunwei Lu
Department of Information Electronics, Fukuoka Institute of Technology, Fukuoka, Japan.
Email: mam12002@bene.fit.ac.jp; lu@fit.ac.jp
Received November 2013
ABSTRACT
Although automobile is an indispensable vehicle to modern life, it also serves as a social problem with a big traf-
fic accident. Among the reasons of traffic accidents, careless driving accounts for the largest part. So in order to
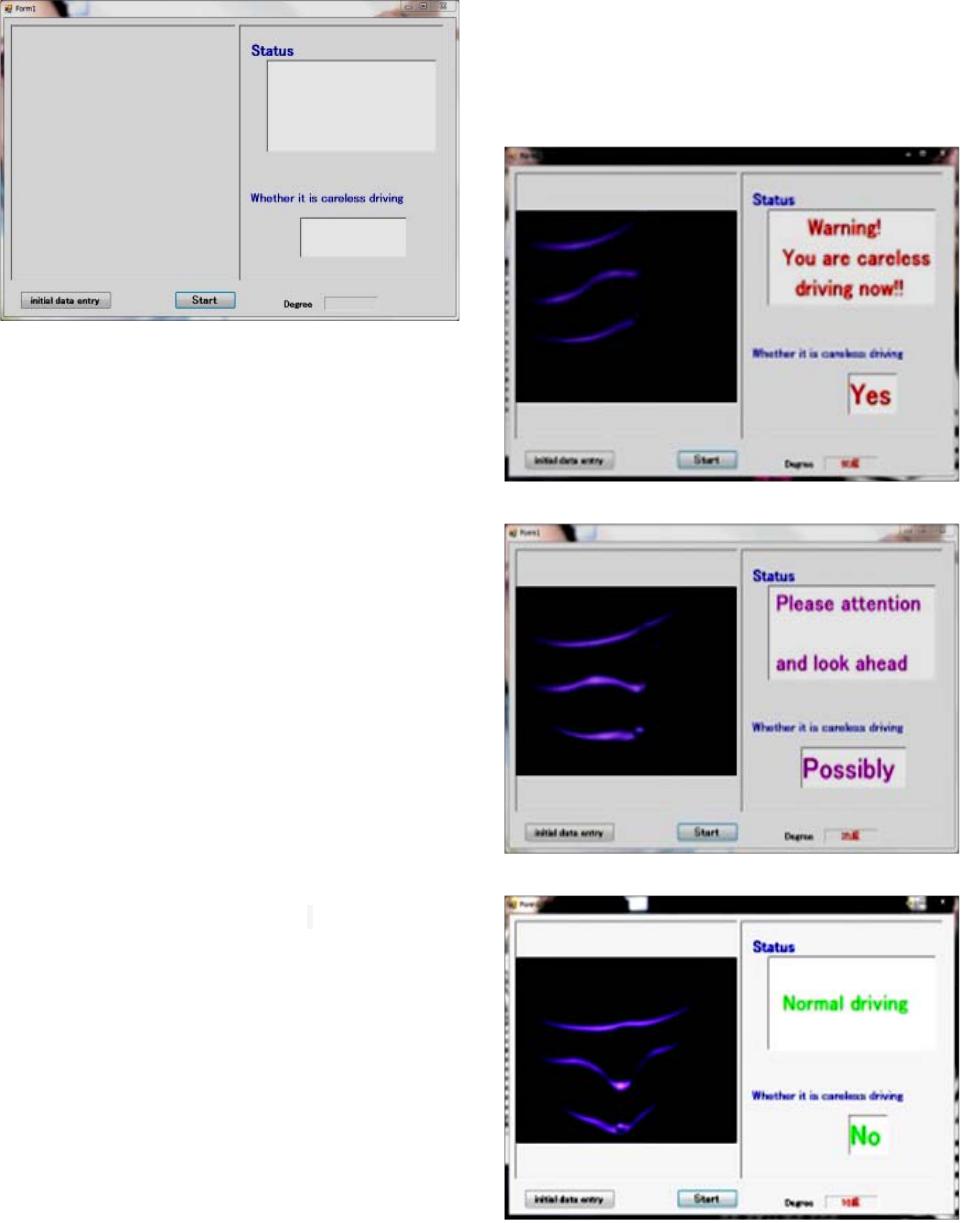
avoid the careless driving, a system which can measure the posture of a driver and warns driver to drive care-
fully in the case of looking aside is necessary. Although the image measurement method is used broadly, there is
a problem on which measurement accuracy is influenced by environment light, makeup of the driver, etc. in the
general method based on the two-dimensional image. Therefore, in this study, we propose an image measure-
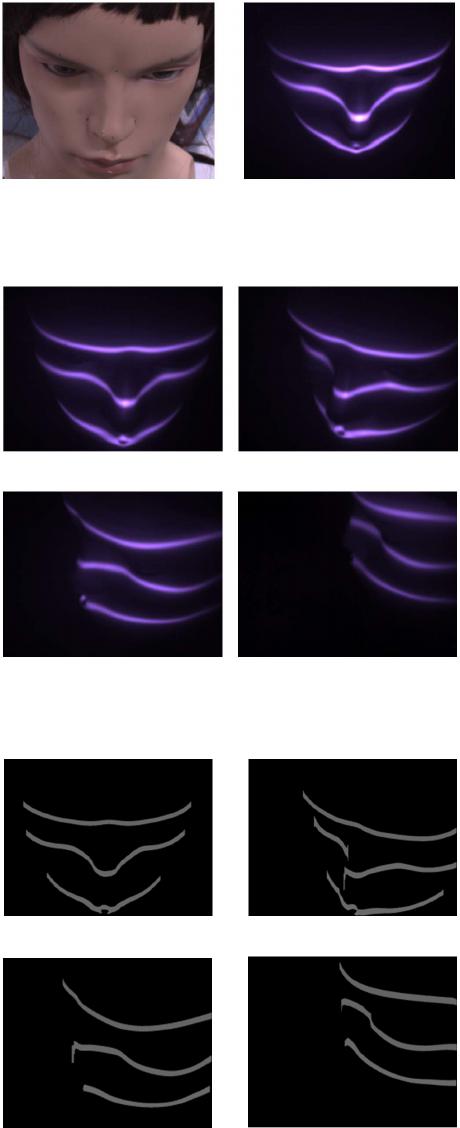
ment method to obtain the head posture of driver. First we use three-dimensional measurement method which
based on the infrared pattern projection to get 3-D information of head, and then we calculate the angle for faces.
In this paper, we explain the composition method of an experiment system, and the results of head posture mea-
surement experiment.
KEYWORDS
Careless Drivi ng ; 3-D Image Measurement; Infrared Pattern Projection; Head Posture Estimation
1. Introduction
Although automobile is an indispensable vehicle to mod-
ern life, it also serves as a social problem with a big traf-
fic accident.
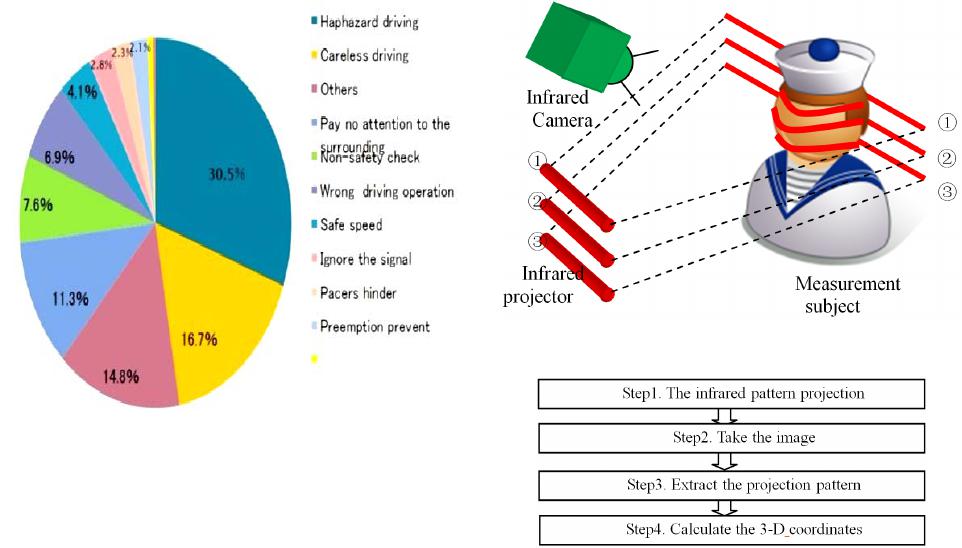
Figure 1 shows the statistics of the causes of traffic
accidents in 2012 from the Japan Metropolitan Police
Department. It shows that in violation of the rules of safe
driving is 58.4%. Among them, 30.5% are haphazard
driving, and safety careless driving accounted for 16.7%
[1].
In order to prevent such problems, it is necessary that
the driver bear in mind the safe driving consciously. But
it can’t keep safe driving according to psychological fac-
tors and physical factors. Therefore, a system which can
warn the driver and determine the operating conditions in
an objective way is necessary.
In recent years, techniques for measuring and quantita-
tive evaluation whether the driver is looking aside from
the outside have been proposed. There are two methods
about the careless driving judgment, one is mainly ac-
cording to the viewing direction of the driver, another is
according to the face direction of the driver.
The first method is taking a 2-D color image of the
driver’s face [2]. Through the position of the pupil and
the iris of eye, the sight line can be detected. However,
this method can’t detect the face direction which is ne-
cessary in the judgment of careless driving. The second
method is extracting the main parts of the face such as
the eyes or mouth [3]. And then use the position rela-
tionship to detect the face direction. However, it only can
detect the face direction between -15 degrees and 15 de-
grees, it is too narrow. Besides the two methods, there
are many other problems when using C color image, such
as the change of environment light, the detection of the
face or eyes, the speed problem of calculation, etc.
In order to solve those problems and to build a usable
measurement system of head posture of driver, in this
study, we propose a 3-D measurement technique based
on the infrared pattern projection, and we develop an
experimental system to verify the validity of the proposal
technique [4,5].
2. Theoretical Method
Before detecting the rotation angle, we should think
about the rapidity and reliability of the method, the in-
fluence of the driver and so on. So in this study, to im-
prove the 3-D measurement speed, slit pattern is used.