Application of Particle Filter for Vertebral body Extraction: A Simulation Study
OPEN ACCESS JCC
5. Conclusion
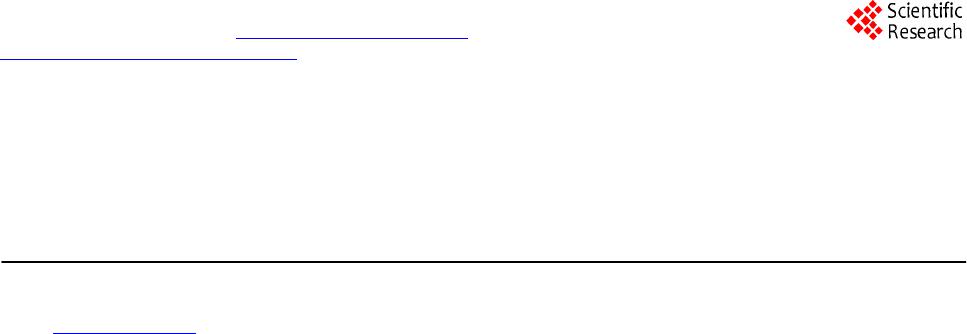
The proposed Vertebral Auto-Tracking System used par-
ticle filter to detect lumbar motion, which can provide a
useful tool for medical diagnosis. This study proved the
reliability and robustness by a simulation lumbar model.
The VATS is evaluated by the model and the simulated
sequence. The satisfactory of results proposed the poten-
tial value in the future clinical application.
REFERENCES
[1] O. Shirado, T. Ito, K. Kaneda and T. E. Stra, “Flex-
ion-Relaxation Phenomenon in the Back Muscles: a
Comparative-Study between Healthy Subjects and Pa-
tients with Chronic Low Back Pa in,” American Journal of
Physical Medicine & Rehabilitation, Vol. 74, No. 2, 1995,
pp. 139-144.
[2] M. M. Panjabi and A. A. White, “Kinematics of the
Spine,” In: M. M. Panjabi and A. A. White, Eds., Clinical
Biomechanics of the Spine, 2nd Edition, J. B. Lippincott
Co., Philadelphia, 1990, pp. 85-126.
[3] J. W. Frymoyer and D. K. Selby, “Segmental Instability:
Rationale for Treatment,” In: G. R. Bell, S. W. Wiesel, J.
N. Weinstein, H. N. Herkowitz and J. Dvorak, Eds., The
Lumbar Spine, 2nd Edition, W. B. Saunders Co., Phila-
delphia, 1996, pp. 43-52.
[4] F. Ringel, M. Stoffel, C. Stüer and B. Meyer, “Minimally
Invasive Transmuscular Pedicle Screw Fixation of the
Thoracic and Lumbar Spine,” Neurosurgery, Vol. 59, No.
4, 2006, pp. ONS-361-ONS-367.
[5] J. M. Olsewski, E. H. Simmons, F. C. Kallen, F. C. Men-
del, C. M. Severin and D. L. Berens, “Morphometry of
the Lumbar Spine: Anatomical Perspectives Related to
Transpedicular Fixation,” Journal of Bone and Joint Sur-
gery American, Vol. 72, No. 4, 1990, pp. 541-549.
[6] M. M. Panjabi, V. Goel, T. Oxland, K. Takata, J. Duran-
ceau, M. Krag, et al., “Human Lumbar Vertebrae: Quan-
titative Three-Dimensional Anatomy,” Spine (Phila Pa
1976), Vol. 17, No. 3, 1992, pp. 299-306.
[7] M. M. Panjabi, K. Takata, V. Goel, D. Federico, T. Oxl-
and, J. Duranceau, et al., “Thoracic Human Vertebrae.
Quantitative Three-Dimensional Anatomy,” Spine (Phila
Pa 1976), Vol. 16, No. 8, 1991, pp. 888-901.
[8] S. W. Lee, K. W. Wong, M. K. Chan, H. M. Yeung, J. L.
Chiu and J. C. Leong, “Development and Validation of a
New Technique for Assessing Lumbar Spine Motion,”
Spine (Phila Pa 1976), Vol. 27, No. 8, 2002, pp. E215-
E20.
[9] D. S. Teyhen, T. W. Flynn, A. C. Bovik and L. D. Abra-
ham, “A New Technique for Digital Fluoroscopic Video
Assessment of Sagittal Plane Lumbar Spine Motion,”
Spine (Phila Pa 1976), Vol. 30, No. 14, 2005, pp. E406-
E413.
[10] A. Breen, R. Allen and A. Morris, “A Digital Video Flu-
oroscopic Technique for Spine Kinematics,” Journal of
Medical Engineering & Technology, Vol. 13, No. 1-2,
1989, pp. E109-E113.
http://dx.doi.org/10.3109/03091908909030208
[11] D. Vander Kooi, G. Abad, J. R. Basford, T. P. Maus, M. J.
Yaszemski and K. R Kaufman, “Lumbar Spine Stabiliza-
tion with a Thoracolumbosacral Orthosis: Evaluation with
Video Fluoroscopy,” Spine (Phila Pa 1976), Vol. 29, No.
1, 2004, pp. 100-104.
[12] A. C. Breen, R. Allen and A. Morris, “Spine Kkinematics:
a Digital Videofluoroscopic Technique,” Journal of bio-
medical engineering, Vol. 11, No. 3, 1989, pp. 224-228.
http://dx.doi.org/10.1016/0141-5425(89)90146-5
[13] K. Takayanagi, K. Takahashi, M. Yamagata, H. Moriya,
H. Kitahara and T. Tamaki, “Using Cineradiography for
Continuous Dynamic-motion Analysis of the Lumbar
Spine,” Spine, Vol. 26, No. 17, 2001, pp. 1858-1865.
[14] M. Panjabi and D. Chang, “An Analysis of Errors in Ki-
nematic Parameters Associated with in Vivo Functional
Radiographs,” Spine (Phila Pa 1976), Vol. 17, No. 2,
1992, pp. 200-205.
[15] Y. Zheng, M. S. Nixon and R. Allen, “Automated Seg-
mentation of Lumbar Vertebrae in Digital Videofluoros-
copic Images,” IEEE Transactions on Medical Imaging,
Vol. 23, No. 1, 2004, pp. 45-52.
[16] S. C. B. Lam, B. McCane and R. Allen, “Automated
Tracking in Digitized Videofluoroscopy Sequences for
Spine Kinematic Analysis,” Image and Vision Computing,
Vol. 27, No. 10, 2009, pp. 1555-1571.
[17] P. Bifulco, M. Cesarelli, R. Allen and M. Bracale, “Au-
tomatic Extraction of Kinematic Parameters from Vi-
deofluoroscopic Sequences of the Spine,” Proceedings of
Health Telematics, Naples, 1995, pp. 147-148.
[18] J. M. Muggleton and R. Allen, “Automatic Location of
Vertebrae in Digitized Videofluoroscopic Images of the
Lumbar Spine,” Medical Engineering & Physics, Vol. 19,
No. 1, 1997, pp. 77-89.
[19] A. Thorkeldsen and A. C. Breen, “Gray Scale Range and
the Marking of Vertebral Coordinates on Digitized Radi-
ographic Images,” Journal of manipulative and physio-
logical therapeutics, Vol. 17, No. 6, 1994, pp. 359-363.
[20] C. Cardan and R. Allen, “Measurement of Spine Motion
for Diagnosis of Mechanical Problems,” Journal of
Computer Simulation & Modelling in Medicine, Vol. 1,
No. 1, 2000, pp. 15-19.
[21] A. Okawa, K. Shinomiya, H. Komori, T. Muneta, Y. Arai,
and O. Nakai, “Dynamic Motion Study of the Whole
Lumbar Spine by Videofluoroscopy,” Spine (Phila Pa
1976), Vol. 23, No. 16, 1998, pp. 1743-1749.