P. ATREYA ET AL.
Open Access OJCE
241
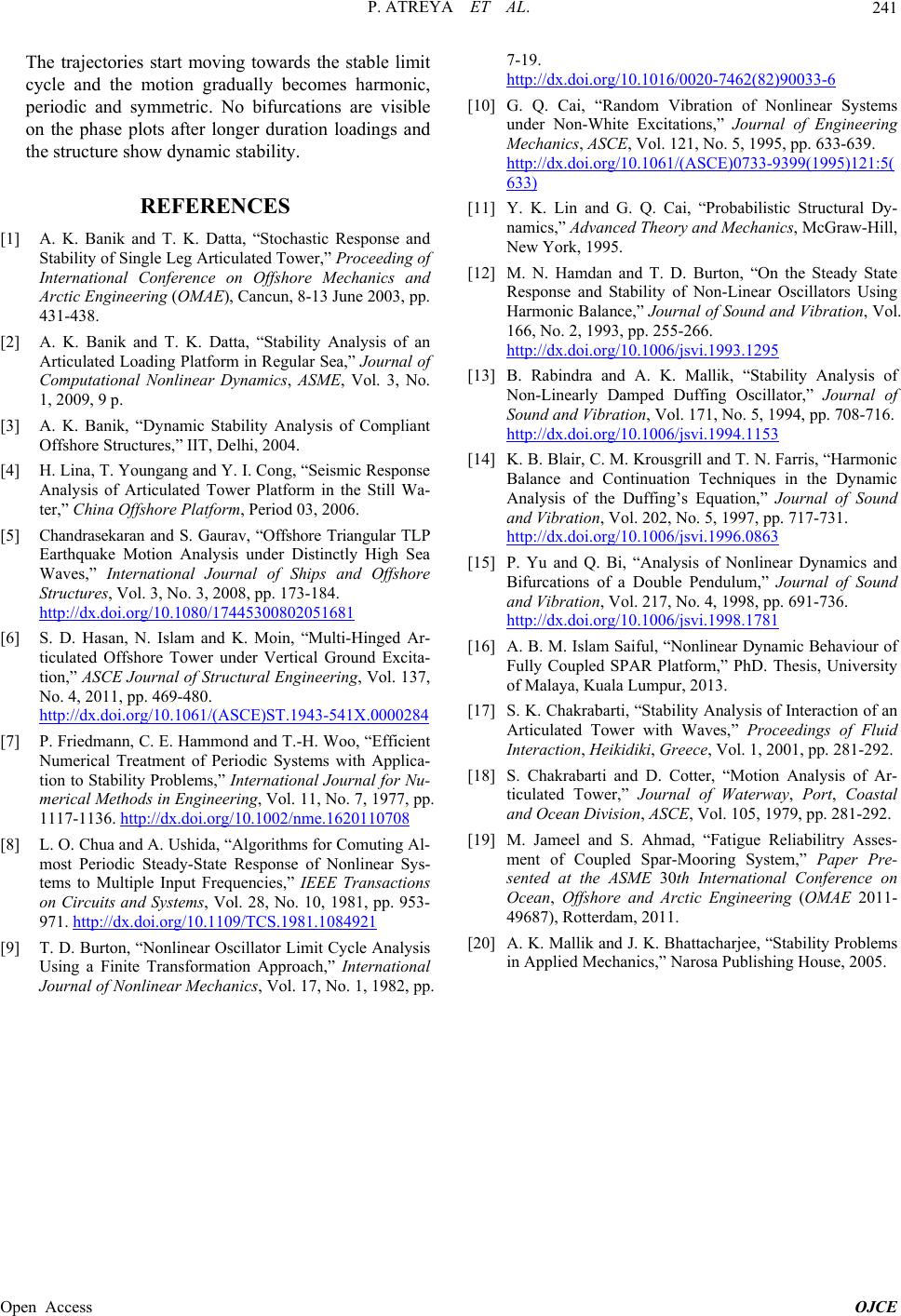
The trajectories start moving towards the stable limit
cycle and the motion gradually becomes harmonic,
periodic and symmetric. No bifurcations are visible
on the phase plots after longer duration loadings and
the structure show dynamic stability.
REFERENCES
[1] A. K. Banik and T. K. Datta, “Stochastic Response and
Stability of Single Leg Articulated Tower,” Proceeding of
International Conference on Offshore Mechanics and
Arctic Engineering (OMAE), Cancun, 8-13 June 2003, pp.
431-438.
[2] A. K. Banik and T. K. Datta, “Stability Analysis of an
Articulated Loading Platform in Regular Sea,” Journal of
Computational Nonlinear Dynamics, ASME, Vol. 3, No.
1, 2009, 9 p.
[3] A. K. Banik, “Dynamic Stability Analysis of Compliant
Offshore Structures,” IIT, Delhi, 2004.
[4] H. Lina, T. Youngang and Y. I. Cong, “Seismic Response
Analysis of Articulated Tower Platform in the Still Wa-
ter,” China Offshore Platform, Period 03, 2006.
[5] Chandrasekaran and S. Gaurav, “Offshore Triangular TLP
Earthquake Motion Analysis under Distinctly High Sea
Waves,” International Journal of Ships and Offshore
Structures, Vol. 3, No. 3, 2008, pp. 173-184.
http://dx.doi.org/10.1080/17445300802051681
[6] S. D. Hasan, N. Islam and K. Moin, “Multi-Hinged Ar-
ticulated Offshore Tower under Vertical Ground Excita-
tion,” ASCE Journal of Structural Engineering, Vol. 137,
No. 4, 2011, pp. 469-480.
http://dx.doi.org/10.1061/(ASCE)ST.1943-541X.0000284
[7] P. Friedmann, C. E. Hammond and T.-H. Woo, “Efficient
Numerical Treatment of Periodic Systems with Applica-
tion to Stability Problems,” International Journal for Nu-
merical Methods in Engineering, Vol. 11, No. 7, 1977, pp.
1117-1136. http://dx.doi.org/10.1002/nme.1620110708
[8] L. O. Chua and A. Ushida, “Algorithms for Comuting Al-
most Periodic Steady-State Response of Nonlinear Sys-
tems to Multiple Input Frequencies,” IEEE Transactions
on Circuits and Systems, Vol. 28, No. 10, 1981, pp. 953-
971. http://dx.doi.org/10.1109/TCS.1981.1084921
[9] T. D. Burton, “Nonlinear Oscillator Limit Cycle Analysis
Using a Finite Transformation Approach,” International
Journal of Nonlinear Mechanics, Vol. 17, No. 1, 1982, pp.
7-19.
http://dx.doi.org/10.1016/0020-7462(82)90033-6
[10] G. Q. Cai, “Random Vibration of Nonlinear Systems
under Non-White Excitations,” Journal of Engineering
Mechanics, ASCE, Vol. 121, No. 5, 1995, pp. 633-639.
http://dx.doi.org/10.1061/(ASCE)0733-9399(1995)121:5(
633)
[11] Y. K. Lin and G. Q. Cai, “Probabilistic Structural Dy-
namics,” Advanced Theory and Mechanics, McGraw-Hill,
New York, 1995.
[12] M. N. Hamdan and T. D. Burton, “On the Steady State
Response and Stability of Non-Linear Oscillators Using
Harmonic Balance,” Journal of Sound and Vibration, Vol.
166, No. 2, 1993, pp. 255-266.
http://dx.doi.org/10.1006/jsvi.1993.1295
[13] B. Rabindra and A. K. Mallik, “Stability Analysis of
Non-Linearly Damped Duffing Oscillator,” Journal of
Sound and Vibration, Vol. 171, No. 5, 1994, pp. 708-716.
http://dx.doi.org/10.1006/jsvi.1994.1153
[14] K. B. Blair, C. M. Krousgrill and T. N. Farris, “Harmonic
Balance and Continuation Techniques in the Dynamic
Analysis of the Duffing’s Equation,” Journal of Sound
and Vibration, Vol. 202, No. 5, 1997, pp. 717-731.
http://dx.doi.org/10.1006/jsvi.1996.0863
[15] P. Yu and Q. Bi, “Analysis of Nonlinear Dynamics and
Bifurcations of a Double Pendulum,” Journal of Sound
and Vibration, Vol. 217, No. 4, 1998, pp. 691-736.
http://dx.doi.org/10.1006/jsvi.1998.1781
[16] A. B. M. Islam Saiful, “Nonlinear Dynamic Behaviour of
Fully Coupled SPAR Platform,” PhD. Thesis, University
of Malaya, Kuala Lumpur, 2013.
[17] S. K. Chakrabarti, “Stability Analysis of Interaction of an
Articulated Tower with Waves,” Proceedings of Fluid
Interaction, Heikidik i, Greece, Vol. 1, 2001, pp. 281-292.
[18] S. Chakrabarti and D. Cotter, “Motion Analysis of Ar-
ticulated Tower,” Journal of Waterway, Port, Coastal
and Ocean Division, ASCE, Vol. 105, 1979, pp. 281-292.
[19] M. Jameel and S. Ahmad, “Fatigue Reliabilitry Asses-
ment of Coupled Spar-Mooring System,” Paper Pre-
sented at the ASME 30th International Conference on
Ocean, Offshore and Arctic Engineering (OMAE 2011-
49687), Rotterdam, 2011.
[20] A. K. Mallik and J. K. Bhattacharjee, “Stability Problems
in Applied Mechanics,” Narosa Publishing House, 2005.