M. A. Nicosia et al. / J. Biomedical Science and Engineering 6 (2013) 21-28
28
the clamping force applied by the clip in this equilibrium
state would depend upon the final deformed thickness of
the tissue. Knowledge of the force-deflection characteri-
stics of the tissue (i.e., the final deformed tissue thick-
ness in response to a given clip force) would provide
valuable information in designing the clip. This clamping
force would then be compared to the force required for
hemostasis to see if the design is viable.
One of the challenges in utilizing computational mod-
eling as a design tool for medical devices is the inherent
uncertainty in physiological systems, both with respect to
tissue constitutive models as well as geometry. In general,
mechanical property data for human subjects are often
scarce and may show considerable variations among in-
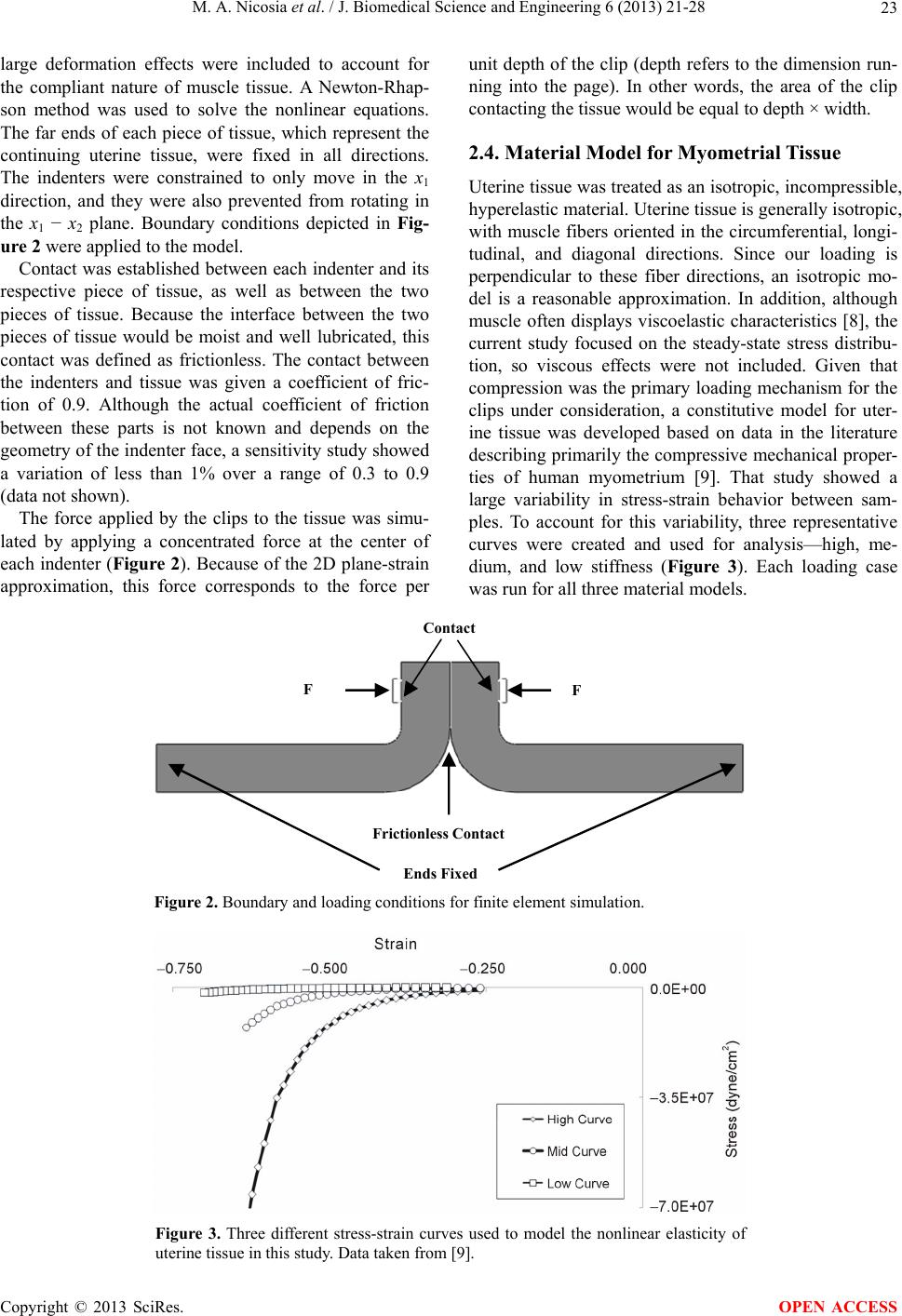
dividuals (see Figure 3). In addition, geometric parame-
ters such as tissue thickness may vary between individu-
als, or even within an individual for different parts of the
organ or for different times. This is particularly relevant
in the current application, cesarean delivery, due to the
rapid post-delivery changes in uterine thickness and ge-
ometry. Our approach was to estimate upper and lower
bounds for both thickness and material properties. Simu-
lations were carried out between these bounds, and
ranges for hemostatic force were provided, rather than a
single value.
Several simplifications were utilized in this work that
could potentially impact the results. The geometric
model utilized was strictly two-dimensional, which ne-
cessitated neglecting three-dimensional effects. One such
three-dimensional effect relates to the use of multiple
clips to close an incision. Even if interlocking clips were
used, the pressure between clips may fall below the
hemostatic limit even if the pressure directly under the
clip is sufficient. This issue can be handled with tightly-
spaced clips and a reasonable factor of safety. Another
three-dimensional effect relates to the clip-face geometry.
In this work, the faces of each clip were modeled as
smooth, whereas they will most likely be textured or
serrated to grip the tissue without slipping. The complex
stress distribution associated with such a face will be a
local effect and will not affect the overall stress distribu-
tion away from the clip, according to St. Venant’s Princi-
ple [7]. Finally, uterine tissue was modeled to be isotro-
pic, while muscle tissue is known to be anisotropic.
However, in this case, the load is applied perpendicular
to the fiber direction (normal to the surface), so it is rea-
sonable to ignore anisotropy.
This work focused specifically on closure of a full-
term pregnant uterus; the development of hemostatic
clips as an alternative to sutures for closure as a part of
cesarean delivery has the potential to improve patient
outcomes. However, the general methodology is applica-
ble to a number of thick-walled organs, and has demon-
strated that computational modeling can provide valuable
information to aid in implant design, potentially improv-
ing the efficiency of the design process.
5. ACKNOWLEDGEMENTS
This study was funded by ZSX Medical and Ben Franklin Technology
Partners of Southeastern PA.
REFERENCES
[1] Taylor, C.A. and Figueroa, C.A. (2009) Patient-specific
modeling of cardiovascular mechanics. Annual Review of
Biomedical Engineering, 11, 109-134.
http://dx.doi.org/10.1146/annurev.bioeng.10.061807.1605
21
[2] Maceri, F., Marino, M. and Vairo, G. (2010) A unified
multiscale mechanical model for soft collagenous tissues
with regular fiber arrangement. Journal of Biomechanics,
43, 355-363.
http://dx.doi.org/10.1016/j.jbiomech.2009.07.040
[3] VitalStats, 2010. http://www.cdc.gov/nchs/vitalstats.htm
[4] Alpay, Z., Saed, G. and Diamond, M.P. (2008) Postop-
erative adhesions: From formation to prevention. Semi-
nars in Reproductive Medicine, 26, 313-321.
http://dx.doi.org/10.1055/s-0028-1082389
[5] Cunningham, F., Leveno, K., Bloom, S., Hauth, J., Gil-
strap, L. and Wenstrom, K. (2005) Williams obstetrics.
22nd Edition, McGraw Hill, New York.
[6] Heil, M. (1996) The stability of cylindrical shells convey-
ing viscous flow. Journal of Fluids and Structures, 10,
173-196. http://dx.doi.org/10.1006/jfls.1996.0012
[7] Lai, W.M., Rubin, D. and Krempl, E. (1993) An introduc-
tion to continuum mechanics. Pergamon Press, Oxford.
[8] Fung, Y.C. (1993) Biomechanics: Mechanical properties
of living tissue. Springer-Verlag, New York.
[9] Pearsall, G.W. (1978) Passive mechanical properties of
uterine muscle (myometrium). Journal of Biomechanics,
11, 1555-1566.
http://dx.doi.org/10.1016/0021-9290(78)90009-X
[10] Humphrey, J.D. (2002) Cardiovascular solid mechanics:
Cells, tissues, and organs. Springer-Verlag, New York.
http://dx.doi.org/10.1007/978-0-387-21576-1
[11] “Abaqus 6.11 Theory Manual. Dassault Systemes,” 2011.
[12] Kraitchman, D.L., Young, A.A., Chang, C.-N. and Axel,
L. (1995) Semi-automatic tracking of myocardial motion
in MR tagged images. IEEE Transactions on Medical Im-
aging, 14, 422-433. http://dx.doi.org/10.1109/42.414606
Copyright © 2013 SciRes. OPEN ACCESS