Y. Z. BAI, X. W. XU
Open Access JAMP
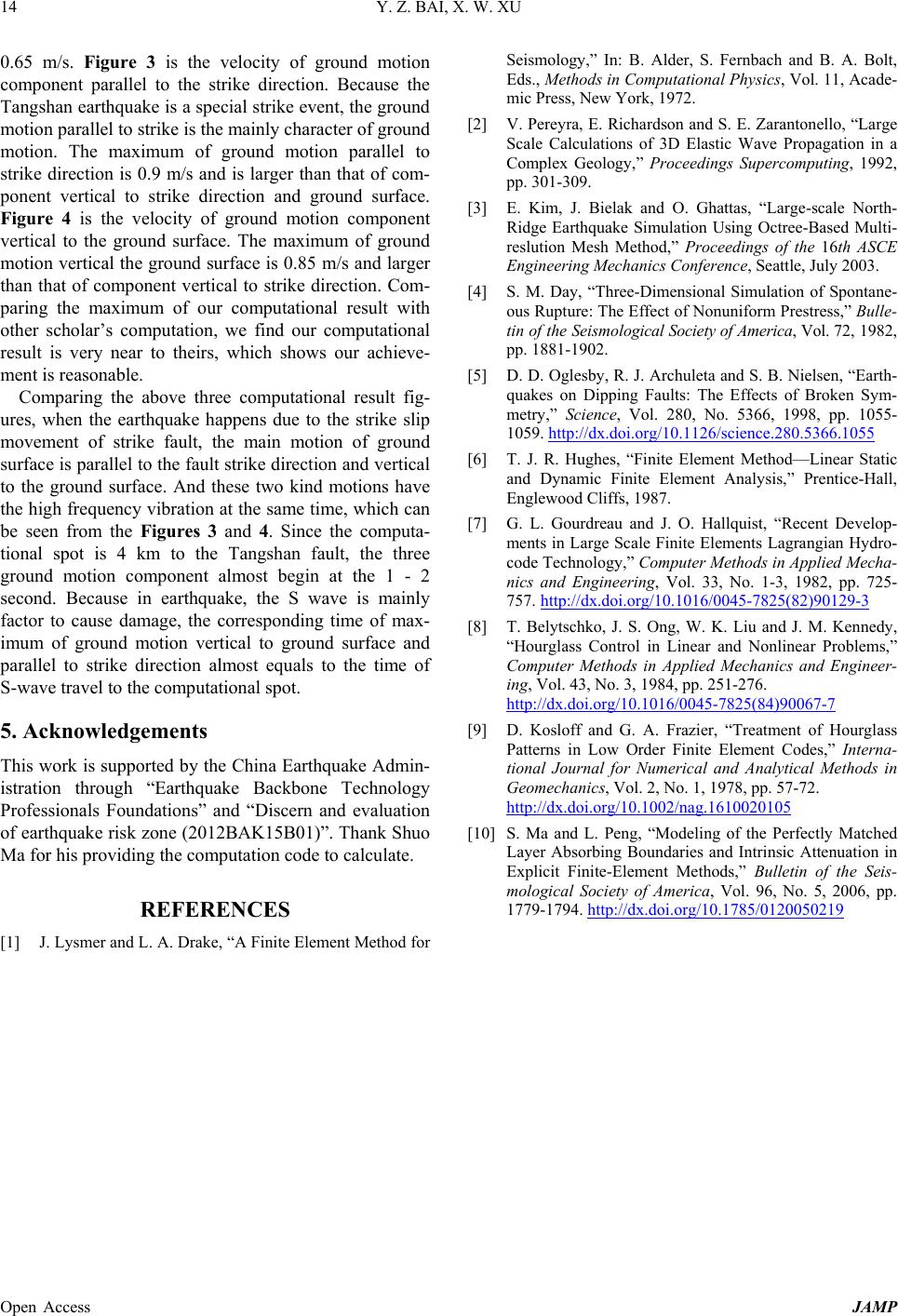
0.65 m/s. Figure 3 is the velocity of ground motion
component parallel to the strike direction. Because the
Tangshan earthquake is a special strike event, the ground
motion parallel to strike is the mainly character of ground
motion. The maximum of ground motion parallel to
strike direction is 0.9 m/s and is larger than that of com-
ponent vertical to strike direction and ground surface.
Figure 4 is the velocity of ground motion component
vertical to the ground surface. The maximum of ground
motion vertical the ground surface is 0.85 m/s and larg er
than that of component vertical to strike direction. Com-
paring the maximum of our computational result with
other scholar’s computation, we find our computational
result is very near to theirs, which shows our achieve-
ment is reasonable.
Comparing the above three computational result fig-
ures, when the earthquake happens due to the strike slip
movement of strike fault, the main motion of ground
surface is parallel to the fault strike direction and vertical
to the ground surface. And these two kind motions have
the high frequency vibration at the same time, which can
be seen from the Figures 3 and 4. Since the computa-
tional spot is 4 km to the Tangshan fault, the three
ground motion component almost begin at the 1 - 2
second. Because in earthquake, the S wave is mainly
factor to cause damage, the corresponding time of max-
imum of ground motion vertical to ground surface and
parallel to strike direction almost equals to the time of
S-wave travel to the computational spot.
5. Acknowledgements
This work is supported by the China Earthquake Admin-
istration through “Earthquake Backbone Technology
Professionals Foundations” and “Discern and evaluation
of earthquake risk zone (2012BAK15B01)”. Thank Shuo
Ma for his providing the computation code to calculate.
REFERENCES
[1] J. Lysmer and L. A. Drake, “A Finite E le ment M ethod for
Seismology,” In: B. Alder, S. Fernbach and B. A. Bolt,
Eds., Methods in Computational Physics, Vol. 11, Acade-
mic Press, New York, 1972.
[2] V. Pereyra, E. Richardson and S. E. Zarantonello, “Large
Scale Calculations of 3D Elastic Wave Propagation in a
Complex Geology,” Proceedings Supercomputing, 1992,
pp. 301-309.
[3] E. Kim, J. Bielak and O. Ghattas, “Large-scale North-
Ridge Earthquake Simulation Using Octree-Based Multi-
reslution Mesh Method,” Proceedings of the 16th ASCE
Engineering Mechanics Conference, Seattle, July 2003.
[4] S. M. Day, “Three-Dimensional Simulation of Spontane-
ous Rupture: The Effect of Nonuniform Prestress,” Bulle-
tin of t he Sei smological Society of America, Vol. 72, 1982,
pp. 1881-1902.
[5] D. D. Oglesby, R. J. Archuleta and S. B. Nielsen, “Earth-
quakes on Dipping Faults: The Effects of Broken Sym-
metry ,” Science, Vol. 280, No. 5366, 1998, pp. 1055-
1059. http://dx.doi.org/10.1126/science.280.5366.1055
[6] T. J. R. Hughes, “Finite Element Method—Linear Static
and Dynamic Finite Element Analysis,” Prentice-Hall,
Englewood Cliffs, 1987.
[7] G. L. Gourdreau and J. O. Hallquist, “Recent Develop-
ments in Large Scale Finite Elements Lagrangian Hydro-
code Technology,” Computer Methods in Applied Mecha-
nics and Engineering, Vol. 33, No. 1-3, 1982, pp. 725-
757. http://dx.doi.org/10.1016/0045-7825(82)90129-3
[8] T. Belytschko, J. S. Ong, W. K. Liu and J. M. Kennedy,
“Hourglass Control in Linear and Nonlinear Problems,”
Computer Methods in Applied Mechanics and Engineer-
ing, Vol. 43, No. 3, 1984, pp. 251-276.
http://dx.doi.org/10.1016/0045-7825(84)90067-7
[9] D. Kosloff and G. A. Frazier, “Treatment of Hourglass
Patterns in Low Order Finite Element Codes,” Interna-
tional Journal for Numerical and Analytical Methods in
Geomechanics, Vol. 2, No. 1, 1978, pp. 57-72.
http://dx.doi.org/10.1002/nag.1610020105
[10] S. Ma and L. Peng, “Modeling of the Perfectly Matched
Layer Absorbing Boundaries and Intrinsic Attenuation in
Explicit Finite-Element Methods,” Bulletin of the Seis-
mological Society of America, Vol. 96, No. 5, 2006, pp.
1779-1794. http://dx.doi.org/10.1785/0120050219