 Advances in Pure Mathematics, 2013, 3, 647-652 Published Online November 2013 (http://www.scirp.org/journal/apm) http://dx.doi.org/10.4236/apm.2013.38086 Open Access APM The Behavior of Normality when Iteratively Finding the Normal to a Line in an lp Geometry Joshua M. Fitzhugh, David L. Farnsworth School of Mathematical Sciences, Rochester Institute of Technology, Rochester, USA Email: JMF7126@rit.edu, DLFSMA@rit.edu Received October 20, 2013; revised November 20, 2013; accepted November 27, 2013 Copyright © 2013 Joshua M. Fitzhugh, David L. Farnsworth. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. ABSTRACT The normal direction to the normal direction to a line in Minkowski geometries generally does not give the original line. We show that in lp geometries with repeatedly finding the normal line through the origin gives sequences of lines that monotonically approach specific lines of symmetry of the unit circle. Which lines of symmetry that are ap- proached depends upon the value of p and the slope of the initial line. 1p Keywords: Minkowski Geometry; Geometric Construction; Iteration; Normality; lp Geometry; Radon Curve 1. Introduction Minkowski geometries are completely characterized by their unit circle, which is centrally symmetric about the origin and convex [1: p. 17]. The spaces are homogene- ous (all points are the same) and generally anisotropic (the yard stick for distance is not the same in all direc- tions). Our principal interest is the planar Minkowski lp geometries with . Their unit circles are 1p 1 p xy. (1) The exponent p must be at least 1 in order for the unit circle to be convex. Convexity is required for the triangle inequality [1: pp. 22,23]. If , this is Euclidean geometry. If , the circle is not strictly convex. As discussed in Section 2, since in Minkowski geometries a necessary and sufficient condition for uniqueness of normal directions to lines is that the unit circle be strictly convex, we do not consider the case. Convex unit circles are strictly convex if they contain no line seg- ments. The l1 geometry is well studied and is sometimes called taxicab, Manhattan, or city-block geometry [2]. Since the unit circle for the limiting case is the square with vertices , we do not consider that geometry, as well. Figure 1 shows some lp unit circles and the circle with , which does not produce a Minkowski geometry since the circle is not convex. 2p 1p 1p p 1, 1 0.5p The unit circle determines distances. For the Min- kowski distance between points P1 and P2, consider line L through the origin O and parallel to the line through P1 and P2. The distance between P1 and P2 is the quotient of 0.8 1.6 -0.8 00.8 -0.8 y -1.6 -1.6 1.6 x Figure 1. Unit circles =1 pp x+y for p = 0.5, 1, 1.5, 2, 4 and 6. The circles with p = 1, 1.5, 2, 4 and 6 give Minkowski geometries. 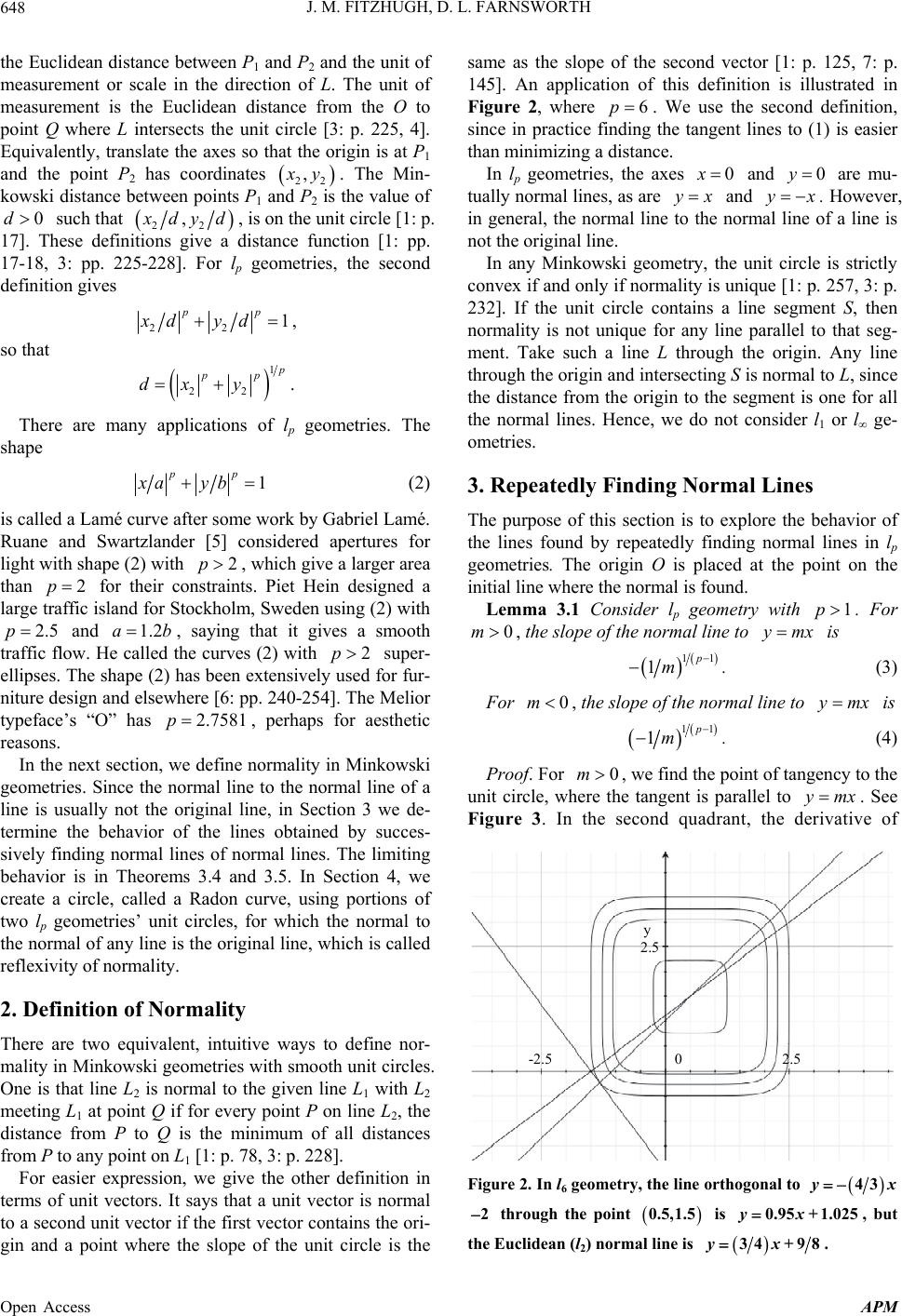 J. M. FITZHUGH, D. L. FARNSWORTH 648 the Euclidean distance between P1 and P2 and the unit of measurement or scale in the direction of L. The unit of measurement is the Euclidean distance from the O to point Q where L intersects the unit circle [3: p. 225, 4]. Equivalently, translate the axes so that the origin is at P1 and the point P2 has coordinates 22 , y. The Min- kowski distance between points P1 and P2 is the value of such that 0d 22 , dy d, is on the unit circle [1: p. 17]. These definitions give a distance function [1: pp. 17-18, 3: pp. 225-228]. For lp geometries, the second definition gives 22 1 pp xd yd, so that 1 22 pp dx y . There are many applications of lp geometries. The shape pp xa yb1 b (2) is called a Lamé curve after some work by Gabriel Lamé. Ruane and Swartzlander [5] considered apertures for light with shape (2) with , which give a larger area than for their constraints. Piet Hein designed a large traffic island for Stockholm, Sweden using (2) with and , saying that it gives a smooth traffic flow. He called the curves (2) with super- ellipses. The shape (2) has been extensively used for fur- niture design and elsewhere [6: pp. 240-254]. The Melior typeface’s “O” has , perhaps for aesthetic reasons. 2p 2.7581 2p 2.5p1.2a p 2p In the next section, we define normality in Minkowski geometries. Since the normal line to the normal line of a line is usually not the original line, in Section 3 we de- termine the behavior of the lines obtained by succes- sively finding normal lines of normal lines. The limiting behavior is in Theorems 3.4 and 3.5. In Section 4, we create a circle, called a Radon curve, using portions of two lp geometries’ unit circles, for which the normal to the normal of any line is the original line, which is called reflexivity of normality. 2. Definition of Normality There are two equivalent, intuitive ways to define nor- mality in Minkowski geometries with smooth unit circles. One is that line L2 is normal to the given line L1 with L2 meeting L1 at point Q if for every point P on line L2, the distance from P to Q is the minimum of all distances from P to any point on L1 [1: p. 78, 3: p. 228]. For easier expression, we give the other definition in terms of unit vectors. It says that a unit vector is normal to a second unit vector if the first vector contains the ori- gin and a point where the slope of the unit circle is the same as the slope of the second vector [1: p. 125, 7: p. 145]. An application of this definition is illustrated in Figure 2, where 6p . We use the second definition, since in practice finding the tangent lines to (1) is easier than minimizing a distance. In lp geometries, the axes and are mu- tually normal lines, as are and . However, in general, the normal line to the normal line of a line is not the original line. 0x yx 0y yx In any Minkowski geometry, the unit circle is strictly convex if and only if normality is unique [1: p. 257, 3: p. 232]. If the unit circle contains a line segment S, then normality is not unique for any line parallel to that seg- ment. Take such a line L through the origin. Any line through the origin and intersecting S is normal to L, since the distance from the origin to the segment is one for all the normal lines. Hence, we do not consider l1 or l ge- ometries. 3. Repeatedly Finding Normal Lines The purpose of this section is to explore the behavior of the lines found by repeatedly finding normal lines in l p geometries. The origin O is placed at the point on the initial line where the normal is found. Lemma 3.1 Consider lp geometry with . For , the slope of the normal line to is 1p mx0my 11 1p m . (3) For 0m , the slope of the normal line to ymx is 11 1p m . (4) Proof. For , we find the point of tangency to the unit circle, where the tangent is parallel to 0m ymx . See Figure 3. In the second quadrant, the derivative of 0 -2.52.5 2.5 y Figure 2. In l6 geometry, the line orthogonal to 43yx 2 through the point 0.5,1.5 is , but the Euclidean (l2) normal line is 0.95 +1.025yx 34 +98yx. Open Access APM  J. M. FITZHUGH, D. L. FARNSWORTH 649 0 0.8 -0.8 -1.6 1.6 0.8 -0.8 -1.6 1.6 y = mx P x Figure 3. OP is normal to= mx . 1 p xy gives 1 dd yx xy . Setting this equal to m gives 11 1p yxm , which is the slope of the normal line to . Formula (4) is derived similarly. □ ymx Lemma 3.2 Consider lp geometry with . Desig- nate by mn the slope of the nth line found by iteratively finding normal lines at the origin, starting with the line with . For even n, 1p 0 ymx00m 2 11 2 p nn mm , (5) and for odd n, 2 11 2 p nn mm . (6) For even n, 11 0 n p n mm , (7) and for odd n, 11 0 1n p n mm . (8) These formulas can be appropriately altered for 00m . Proof. To obtain (5), for even n, using (3), 11 11p nn mm (9) and using (4) and (9), 2 11 21 11 11 11 1 11 . p nn p p n p n mm m m Equation (5) supplies 2 11 20 p mm and also the main induction step to give (7). Similarly, obtain (6) and (8). □ Lemma 3.3 Consider lp geometry with . If 1p 0,1 0,2 1mm , (10) then ,1 ,2 1 n mm n , (11) where the second subscript indicates the identity of the line. Proof. Take m0,1 and m0,2 to be positive. The proof for negative initial slopes is similar. For even n, using (7) for line 1, (10), and then (7) for line 2 give 11 11 ,1 0,10,2,2 11 nn pp nn mmm m . The proof of (11) for odd n uses (8) and (10) in a simi- lar manner. □ Because of the symmetries of the lp unit circle about the axes, only 0 need be considered. The condi- tion 0m 0,1 0,2 m1m between the slopes of two initial lines means that the lines have the same angle with the respec- tive axes. Lemma 3.3 shows the symmetries about x in the behavior of the iterated normal lines, so only initial slopes between 0 and 1 need to be considered. Theorem 3.4 Consider lp geometry with . For the initial line 0 2p ymx with 0, the subse- quence of 0m1 n m for even n has values and monotonically approaches 1, and the subsequence for odd n has values 01 n m 1 n m and monotonically ap- proaches –1. For the initial line 0 with , the subsequence of ymx0 m1 n m n m for even n has values and monotonically approaches 1, and the subsequence for odd n has values and monotonically ap- proaches –1. 1 n m 1 Proof. Take 0 0m1 . Using Lemma 3.2, for even n, 2 11 2 p nn mm n m and 11 0 Limit Limit1 n p n nn mm . For odd n, 2 11 2 p nn mm n m and 11 0 LimitLimit1 1 n p n nn mm 1 . Lemma 3.3 says that initial lines 0 with ymx 0 0m 01m give the behavior of the iterated normal lines for . □ Open Access APM 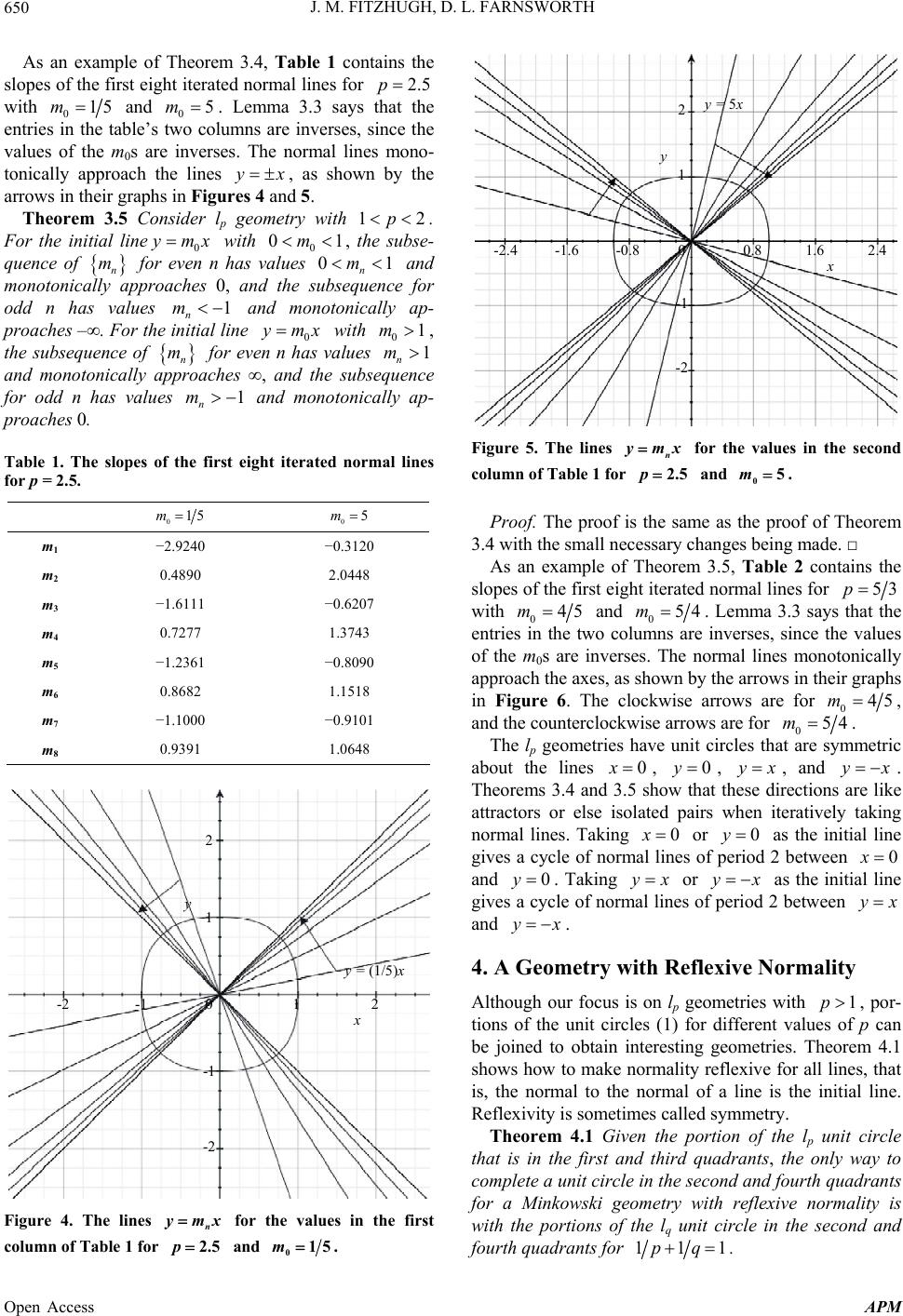 J. M. FITZHUGH, D. L. FARNSWORTH 650 As an example of Theorem 3.4, Table 1 contains the slopes of the first eight iterated normal lines for 2.5p with 015m and 0. Lemma 3.3 says that the entries in the table’s two columns are inverses, since the values of the m0s are inverses. The normal lines mono- tonically approach the lines 5m x, as shown by the arrows in their graphs in Figures 4 and 5. Theorem 3.5 Consider lp geometry with 12p 1 01 n m 01m 1 n m . For the initial line0 with 0 0, the subse- quence of for even n has values and monotonically approaches 0, and the subsequence for odd n has values and monotonically ap- proaches –∞. For the initial line 0 with , the subsequence of for even n has values and monotonically approaches , and the subsequence for odd n has values and monotonically ap- proaches 0. ymx n m n m n m m ymx n m 1 1 Table 1. The slopes of the first eight iterated normal lines for p = 2.5. 015m 05m m1 −2.9240 −0.3120 m2 0.4890 2.0448 m3 −1.6111 −0.6207 m4 0.7277 1.3743 m5 −1.2361 −0.8090 m6 0.8682 1.1518 m7 −1.1000 −0.9101 m8 0.9391 1.0648 0 1 -1 -2 2 x -1 -2 1 2 y y = (1/5 ) x Figure 4. The lines n mx 2.5p for the values in the first column of Table 1 for and 015m. 0 0.8 -0.8-1.61.6 2.4-2.4 x y -1 -2 1 2 y = 5x Figure 5. The lines n mx 2.5p for the values in the second column of Table 1 for and . 05m Proof. The proof is the same as the proof of Theorem 3.4 with the small necessary changes being made. □ As an example of Theorem 3.5, Table 2 contains the slopes of the first eight iterated normal lines for 53p with 045m and 054m . Lemma 3.3 says that the entries in the two columns are inverses, since the values of the m0s are inverses. The normal lines monotonically approach the axes, as shown by the arrows in their graphs in Figure 6. The clockwise arrows are for 045m , and the counterclockwise arrows are for 054m. The lp geometries have unit circles that are symmetric about the lines 0x , , , and 0yyxyx . Theorems 3.4 and 3.5 show that these directions are like attractors or else isolated pairs when iteratively taking normal lines. Taking 0x or as the initial line gives a cycle of normal lines of period 2 between 0y 0x and 0y . Taking yx or as the initial line gives a cycle of normal lines of period 2 between yx yx and yx . 4. A Geometry with Reflexive Normality Although our focus is on lp geometries with , por- tions of the unit circles (1) for different values of p can be joined to obtain interesting geometries. Theorem 4.1 shows how to make normality reflexive for all lines, that is, the normal to the normal of a line is the initial line. Reflexivity is sometimes called symmetry. 1p Theorem 4.1 Given the portion of the lp unit circle that is in the first and third quadrants, the only way to complete a unit circle in the second and fourth quadrants for a Minkowski geometry with reflexive normality is with the portions of the lq unit circle in the second and fourth quadrants for 11pq 1 . Open Access APM  J. M. FITZHUGH, D. L. FARNSWORTH 651 Table 2. The slopes of the first eight iterated normal lines for p = 5/3. 045m 054m m1 −1.3975 −0.7155 m2 0.6053 1.6521 m3 −2.1236 −0.4709 m4 0.3231 3.0946 m5 −5.4439 −0.1837 m6 0.0787 12.702 m7 −45.269 −0.0221 m8 0.0033 304.58 0 1 -1 -2 2 x y -1 1 2 y = (4/5 ) x y = (5/4 ) x Figure 6. The lines n mx for the values in Table 2 for 53p with 045m and 054m. Proof. Since Minkowski unit circles are symmetric about their centers, we can reference only the first and second quadrants. Take the center to be the origin, and construct all normal lines at the origin. In the first quad- rant, the unit circle is . In the second quad- rant, the unit circle is pp xy1 gx 22 . The original line L1 is , , which intersects at the point 111 . The construction is illustrated in Figure 7 for p = 4. For reflexivity, demand that the slope of line L1 equals the slope of the tangent line L3 at the point 222 with ytx ,Px ,Px 0t y y pp xy1 gx xy , and demand that the slope of the line L2 tangent to at 1 pp 111 ,Pxy equals the slope 22 xy of the line L4, which is to be orthogonal to line L1. The goal is to find the function x. The slope of L2 is found by taking the derivative of to obtain pp xy1 11 dd0 pp pxpyy x . Then, 1 111 dd 1 p p p yx xyxtxtt . Equating the slopes of the lines L1 and L3 gives 02 P 2 P 1 L 1 L 3 L 2 L 4 y 2.5 .5 Figure 7. The unit circle in this Minkowski geometry is 44 +=xy1 in quadrants 1 and 3 and 43 43 +=xy1 in quadrants 2 and 4. Li nes L1 and L3 are parallel, as are lines L2 and L4. In this geometry, normality is reflexive, that is, L4 is normal to L1 and L1 is normal to L4 for any choice of L1. 2 ddtyxx (12) with gx. Equating the slopes of lines L2 and L4 gives 1 22 p ty x. (13) Solving (13) for t gives 11 22 tyx . (14) Equating the expressions for t in (12) and (14) and dropping the subscript 2 give the differential equation 111 1 11 dd or dd pp p yxyxyyxx , whose unique solution is 1 1pp pp yx C . Since 00yg1 , . Designating 1C 1pp by q gives 11pq 1 and 1 qq xy for gx in the second and fourth quadrants. □ The unit circles 44 1xy and 43431xy are dual, since 14 1431 . Dual unit circles and dual spaces are central to Minkowski geometry [1,3,7]. Schäffer’s theorem says that dual unit circles have the same circumferences, when the circumferences are mea- sured with their own distance functions [1: pp. 111-118, Open Access APM  J. M. FITZHUGH, D. L. FARNSWORTH Open Access APM 652 7: p. 153, 8,9]. Because of the symmetry of the unit circle in Theorem 4.1, it has the same circumference as the dual lp and lq unit circles whose arcs compose it. Radon curves are equivalently defined as either unit circles for which normality is reflexive for all lines or unit circles that have arcs of dual circles in alternating quadrants as in Theorem 4.1’s example [1: p. 128, 3: pp. 233-234, 7: pp. 143-145, 10]. REFERENCES [1] A. C. Thompson, “Minkowski Geometry,” Cambridge University Press, Cambridge, 1996. http://dx.doi.org/10.1017/CBO9781107325845 [2] E. F. Krause, “Taxicab Geometry,” Dover Publications, New York, 1986. [3] R. V. Benson, “Euclidean Geometry and Convexity,” Mc- Graw-Hill, New York, 1966. [4] B. V. Dekster, “An Angle in Minkowski Space,” Journal of Geometry, Vol. 80, No. 1, 2004, pp. 31-47. [5] G. J. Ruane and G. A. Swartzlander Jr., “Optical Vortex Coronagraphy with an Elliptical Aperture,” Applied Op- tics, Vol. 52, No. 2, 2013, pp. 171-176. http://dx.doi.org/10.1364/AO.52.000171 [6] M. Gardner, “Mathematical Carnival,” Alfred A. Knopf, New York, 1975. [7] J. C. Álvarez Paiva and A. Thompson, “On the Perimeter and Area of the Unit Disc,” The American Mathematical Monthly, Vol. 112, No. 2, 2005, pp. 141-154. http://dx.doi.org/10.2307/30037412 [8] J. J. Schäffer, “The Self-Circumferences of Polar Convex Disks,” Archiv de Mathematik, Vol. 24, 1973, pp. 87-90. http://dx.doi.org/10.1007/BF01228179 [9] J. B. Keller and R. Vakil, “p, the Value of in lp,” The American Mathematical Monthly, Vol. 116, No. 10, 2009, pp. 931-935. http://dx.doi.org/10.4169/000298909X477069 [10] J. Radon, “Über eine Besondere Art Ebener Konvexer Kurven,” Berichte der Sächsische Akademie der Wissen- schaften zu Leipzig, Vol. 68, 1916, pp. 131-134.
|