Applied Mathematics
Vol.08 No.01(2017), Article ID:73744,9 pages
10.4236/am.2017.81004
The Solution of Yang-Mills Equations on the Surface
Peng Zhu, Liyuan Ding
Department of Mathematics, Yunnan Normal University, Kunming, China

Copyright © 2017 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/



Received: December 9, 2016; Accepted: January 19, 2017; Published: January 23, 2017
ABSTRACT
We show that Yang-Mills equation in 3 dimensions is local well-posedness in
if the norm is sufficiently. Here, we construct a solution on the quadric that is independent of the time. And we also construct a solution of the polynomial form. In the process of solving, the polynomial is used to solve the problem before solving.
Keywords:
-Space, Well-Posedness, Polynomial, Quadric

1. Introduction and Preliminaries
This paper is concerned with the solution of the Yang-Mills equation.
We shall denote
-valued tensors define on Minkowski space-time
by bold character
, where
ranges over 0, 1, 2, 3. We use the usual summation conventions on
, and raise and lower indices with respect to the Minkowski metric
; for more details, see [1] [2] [3] . Given an arbitrary
-valued tensor
.
The curvature of a connection
by
Here [,] denotes the Lie bracket of
. It appears in calculations whenever we commute covariant derivatives [4] [5] , or more precisely that
We can expand this as
where
The Cauchy problem for Yang-mills equation is not well-posed because of gauge invariance (see [6] [7] ). However, if one fixes the connection to lie in the temporal gauge
, the Yang-Mills equations become essentially hyperbolic [8] [9] , and simplify to
(1)
and
(2)
where
.
The local well-posedness of the Equations (1) and (2) have already proved in [10] . Here in not described in detail. This paper will show that the solution of operator and polynomial type.
2. Exact Solution of Equation
Below we will construct the exact solution of the equation on the general quadric that denotes by
(3)
where
.
We bring (3) to Equation (2), because the equation is used in the two general surfaces, we define the general quadric by
as coefficient and
. So we calculate the equation. The first calculation can be
Divergence terms can be
Finally, the sections of Lie bracket can be
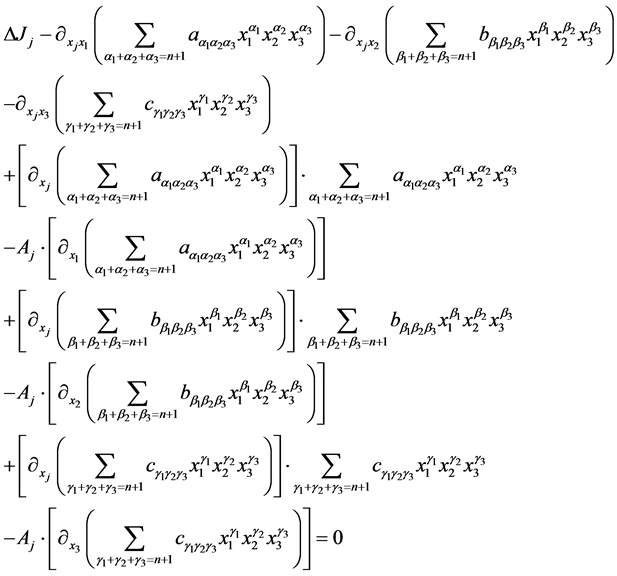
Combining the above calculations we have
We will use the properties of polynomials to list the coefficient equations in order to solve the (3). For the cross terms and square terms coefficient, we have
(4)
First, we consider
.
The constant coefficient equation is
The coefficient equation of
is
(5)
The coefficient equation of
is
(6)
The coefficient equation of
is
(7)
Because of the (4), the coefficient equation of constant can be
(8)
we have
(9)
Deformation by (6), we have
(10)
Simulaneous (8) and (10), we have
(11)
First, for (9) we can use mathematica to get
where
is a constant,
denotes the arbitrary combination of functions represented as independent variables in square brackets. For example,
is represented as
or
and so on.
Next, from (11) we can obtain
where
is a constant.
We can observe the above
and the general properties of two surfaces,
is irrelevant to the
and
, so
.
Because of
, we take
into the (11) can be obtain
By two surfaces we can obtain
Similarly, we can prove that
, we have
In summary, when the Equation (2) is acting on the quadric, we have
3. Polynomial Solutions
3.1. First Order Polynomial Solution
Below we construct a polynomial solution. First, the constant must satisfy the equation so that all constant are the solutions of the Equation (1) and (2). Then we define the solution of a polynomial form on a surface by
where
,
is satisfied the (1) because of not contain time t. Then we just need to bring
into (2). We have
(12)
Equation (12) is composed of three equations. First we consider the case of
. So the constant coefficient equation is
The coefficient equation of
is
The coefficient equation of
is
The coefficient equation of
is
When
, the relationship of the coefficients are
When
, the relationship of the coefficients are
There exist 12 equations. By solving the above equations, we can obtain
Therefore
(13)
where
.
In summary, the solution of the polynomial form of Yang-Mills equation is expressed in the form of (13).
3.2. The Quadratic Polynomial Solution
In this section, we mainly discuss the solution of the quadratic polynomial form of the Yang-Mills equation on the two surfaces. We define by
where
,
are coefficients. So
must satisfy the Equation (1), therefore, it just needs to take
into (12), we have
There exist 30 equations and 30 unknowns. Solving the equations we can obtain the following results
So the solution of the equation can be written
(14)
where
In summary, the solution of the quadratic polynomial form of Yang-Mills equation is (14). It obvious that (13) is equal to (14). So we conjecture that the solution of n-degree polynomial on n-sub surface is also (14). In the next section, we will proof the hypothesis.
3.3. Solution of N-Degree Polynomial
In this section, we mainly use mathematical induction to prove the hypothesis. We define that by
(15)
where
,
are coefficients.
In the front two sections, it is easy for us to conclude that when
the solutions are the same. So we will use mathematical induction to prove that when
the solution is also (14).
First, we assume that when
the solution of the equation is
where
Now when
, we h
ave
To further simplify (15), we have
To bring into the equation, we have
where
is
On the number of
in the above equation is either less than
, or more than
. When the number of
is less than
, the solution of the equation is
And the number of more than
of the items in the n-sub surfaces is always equal to zero.
4. Conclusion
In summary, we can get the solution of the polynomial type of Yang-Mills equation by mathematical induction is
where
Cite this paper
Zhu, P. and Ding, L.Y. (2017) The Solution of Yang-Mills Equations on the Surface. Applied Mathematics, 8, 35-43. http://dx.doi.org/10.4236/am.2017.81004
References
- 1. Klainerman, S. and Machedon, M. (1995) Finite Energy Solutions for Yang-Mills Equations in R3+1. Annals of Mathematics, 142, 39-119. https://doi.org/10.2307/2118611
- 2. Zhou, J.W. (2010) Lectures on Differential Geomentry. Science Press, Beijing.
- 3. Barletta, E., Dragomir, S. and Urakawa, H. (2006) Yang-Mills Field on CR Manifolds. Journal of Mathematical Physics, 47, Article ID: 083504, 41.
- 4. Gu, C.H. and Li, D.Q. (2012) Equations of Mathematical Physics. China Higher Education Press, CHEP, Beijing.
- 5. Yajima, K. (1987) Existence of Solutions for Schrodinger Evolution Equations. Communications in Mathematical Physics, 110, 415-426. https://doi.org/10.1007/BF01212420
- 6. Ghanem S. (2013) The Global Existence of Yang-Mills Fields on Curved Space-Times. Mathematics.
- 7. Foschi, D. and Klainerman, S. (2000) Bilinear Space-Time Estimates for Homogeneous Wave Equations. Annales Scientifiques de l’école Normale Supérieure, 33, 211-274. https://doi.org/10.1016/s0012-9593(00)00109-9
- 8. Klainerman, S. and Tataru, D. (1999) On the Optimal Regularity for Yang-Mills equations in R^(4+1). Journal of the American Mathematical Society, 12, 93-116. https://doi.org/10.1090/S0894-0347-99-00282-9
- 9. Tao, T. (2001) Multilinear Weighted Convolution of L2 Functions, and Applications to Non-Linear Dispersive Equations. The American Journal of Mathematics, 123, 839-908. https://doi.org/10.1353/ajm.2001.0035
- 10. Tao, T. (2003) Local Well-Posedness of Yang-Mills Equation in the Temporal Gauge below the Energy Norm. Journal of Differential Equations, 189, 366-382. https://doi.org/10.1016/S0022-0396(02)00177-8





