Journal of Signal and Information Processing
Vol.07 No.02(2016), Article ID:66884,37 pages
10.4236/jsip.2016.72011
Robust Optimal H¥ Control for Uncertain 2-D Discrete State-Delayed Systems Described by the General Model
Arun Kumar Singh, Amit Dhawan
Department of Electronics and Communication Engineering, Motilal Nehru National Institute of Technology, Allahabad, India

Copyright © 2016 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 2 April 2016; accepted 24 May 2016; published 27 May 2016
ABSTRACT
This paper investigates the problem of robust optimal  control for uncertain two-dimensional (2-D) discrete state-delayed systems described by the general model (GM) with norm-bounded uncertainties. A sufficient condition for the existence of g-suboptimal robust
control for uncertain two-dimensional (2-D) discrete state-delayed systems described by the general model (GM) with norm-bounded uncertainties. A sufficient condition for the existence of g-suboptimal robust  state feedback controllers is established, based on linear matrix inequality (LMI) approach. Moreover, a convex optimization problem is developed to design a robust optimal
state feedback controllers is established, based on linear matrix inequality (LMI) approach. Moreover, a convex optimization problem is developed to design a robust optimal  state feedback controller which minimizes the
state feedback controller which minimizes the  noise attenuation level of the resulting closed-loop system. Finally, two illustrative examples are given to demonstrate the effectiveness of the proposed method.
noise attenuation level of the resulting closed-loop system. Finally, two illustrative examples are given to demonstrate the effectiveness of the proposed method.
Keywords:
2-D Discrete Systems, General Model,  Control, Linear Matrix Inequality, State Feedback, Uncertain System
Control, Linear Matrix Inequality, State Feedback, Uncertain System

1. Introduction
Over the past decades, the problem of  control for 2-D discrete systems has drawn considerable attention. The main advantage of
control for 2-D discrete systems has drawn considerable attention. The main advantage of  control is that its performance specification takes into account the worst-case performance of the system in terms of the system energy gain [1] . Based on this idea, many important results have been obtained in the literature [2] - [5] . Among these results, the problem of
control is that its performance specification takes into account the worst-case performance of the system in terms of the system energy gain [1] . Based on this idea, many important results have been obtained in the literature [2] - [5] . Among these results, the problem of  control and robust stabilization of 2-D discrete systems described by the Roesser model has been addressed in [2] . A solution to the problem of robust
control and robust stabilization of 2-D discrete systems described by the Roesser model has been addressed in [2] . A solution to the problem of robust  control for uncertain 2-D discrete systems represented by the general model (GM) via output feedback controllers has been presented in [3] . A 2-D filtering approach, based on the 2-D bounded real lemma, with an
control for uncertain 2-D discrete systems represented by the general model (GM) via output feedback controllers has been presented in [3] . A 2-D filtering approach, based on the 2-D bounded real lemma, with an  performance measure for 2-D discrete systems described by the Fornasini-Marchesini (FM) second model has been developed in [4] . The dynamic output feedback
performance measure for 2-D discrete systems described by the Fornasini-Marchesini (FM) second model has been developed in [4] . The dynamic output feedback  stabilization problem for a class of 2-D discrete switched systems represented by the FM second model has been addressed in [5] .
stabilization problem for a class of 2-D discrete switched systems represented by the FM second model has been addressed in [5] .
It is well known that delay is encountered in many dynamic systems and is often a source of instability, thus, much attention has been focused on the problem of stability analysis and controller design for 2-D discrete state-delayed systems in the last few years [6] - [25] . In [6] , the problem of stability analysis for 2-D discrete state-delayed systems in the GM has been considered and sufficient conditions for stability have been derived via Lyapunov approach. The problem of delay-dependent guaranteed cost control for uncertain 2-D discrete state-delayed system described by the FM second model has been presented in [7] . In [8] , the problem of robust guaranteed cost control for uncertain 2-D discrete state-delayed systems described by the FM second model has been considered. Several corrections in the main results of [8] have been made in [9] . In [10] , the guaranteed cost control problem via memory state feedback control laws for a class of uncertain 2-D discrete state-delayed systems described by the FM second model has been discussed. Robust reliable control of uncertain 2-D discrete switched state-delayed systems described by the Roesser model has been presented in [11] . The problem of positive real control for 2-D discrete state-delayed systems described by the FM second model via output feedback controllers has been addressed in [12] . In [13] , the problem of delay-dependent  control for 2-D discrete state-delayed system described by the FM second model has been investigated. The problem of
control for 2-D discrete state-delayed system described by the FM second model has been investigated. The problem of  control for 2-D discrete state-delayed systems described by the FM second model has been studied in [14] and a method to design an optimal
control for 2-D discrete state-delayed systems described by the FM second model has been studied in [14] and a method to design an optimal  state feedback controller has been presented. Here, it may be mentioned that [14] considers the FM second model without uncertainties, but in the real world situation, the uncertainties in the system parameters cannot be avoided.
state feedback controller has been presented. Here, it may be mentioned that [14] considers the FM second model without uncertainties, but in the real world situation, the uncertainties in the system parameters cannot be avoided.
With this motivation, we consider the problem of robust optimal  control for uncertain 2-D discrete state-delayed systems described by the GM. The approach adopted in this paper is as follows: We first establish a sufficient condition for the existence of g-suboptimal robust
control for uncertain 2-D discrete state-delayed systems described by the GM. The approach adopted in this paper is as follows: We first establish a sufficient condition for the existence of g-suboptimal robust  state feedback controllers in terms of a certain linear matrix inequality (LMI). Further, a convex optimization problem is introduced to select a robust optimal
state feedback controllers in terms of a certain linear matrix inequality (LMI). Further, a convex optimization problem is introduced to select a robust optimal  state feedback controller which minimizes the
state feedback controller which minimizes the  noise attenuation level g of the closed-loop system. Finally, two illustrative examples are given to demonstrate the effectiveness of the proposed technique.
noise attenuation level g of the closed-loop system. Finally, two illustrative examples are given to demonstrate the effectiveness of the proposed technique.
2. Problem Formulation and Preliminaries
The following notations are used throughout the paper:
 real vector space of dimension n.
real vector space of dimension n.
 set of
set of  real matrices.
real matrices.
 null matrix or null vector of appropriate dimension.
null matrix or null vector of appropriate dimension.
 identity matrix of appropriate dimension.
identity matrix of appropriate dimension.
 transpose of matrix
transpose of matrix .
.
 stands for a block diagonal matrix.
stands for a block diagonal matrix.
 matrix
matrix  positive definite symmetric.
positive definite symmetric.
 matrix
matrix  negative definite symmetric.
negative definite symmetric.
Consider the uncertain 2-D discrete state-delayed systems described by the GM [26] .
 (1a)
(1a)
 , (1b)
, (1b)
where  are horizontal and vertical coordinates,
are horizontal and vertical coordinates,  ,
,  represent the state and control input, respectively,
represent the state and control input, respectively,  is the controlled output,
is the controlled output,  is the noise input which belongs to
is the noise input which belongs to  and
and
 (1c)
(1c)
The matrices ,
,  ,
,  ,
,  and
and  are known constant matrices representing the nominal plant;
are known constant matrices representing the nominal plant; ,
,  ,
,  and
and  are constant positive integers representing delays. The matrices
are constant positive integers representing delays. The matrices ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  and
and  represent parameter uncertainties in the system matrices, which are assumed to be of the form
represent parameter uncertainties in the system matrices, which are assumed to be of the form
 (1d)
(1d)
where 

 , and
, and  are known structural matrices of uncertainty and
are known structural matrices of uncertainty and  is an unknown matrix representing parameter uncertainty which satisfies
is an unknown matrix representing parameter uncertainty which satisfies
 (or equivalently,
(or equivalently, ). (1e)
). (1e)
It is assumed that the system (1) has a finite set of initial conditions [6] , i.e., there exist two positive integers  and
and , such that
, such that
 (2)
(2)
Definition 1 [14] . The system described by (1) is asymptotically stable if  with
with 
 and the initial condition (2), where
and the initial condition (2), where 
Definition 2 [14] . Consider the system (1) with  and the initial condition (2). Given a scalar
and the initial condition (2). Given a scalar  and symmetric positive definite matrices
and symmetric positive definite matrices  the system (1) is said to have an
the system (1) is said to have an  noise attenuation
noise attenuation  if it is robustly stable and satisfies
if it is robustly stable and satisfies
 (3)
(3)
where 

 and
and
The following well established lemmas are essential for the proof of our main results.
Lemma 1 [27] - [29] . Let  and
and  be given matrices. Then, there exist a positive definite matrix
be given matrices. Then, there exist a positive definite matrix  such that
such that
 (4)
(4)
for all  satisfying
satisfying  if and only if there exists a scalar
if and only if there exists a scalar  such that
such that
 (5)
(5)
Lemma 2 [30] . For real matrices  of appropriate dimension, where
of appropriate dimension, where  and
and  then
then  if and only if
if and only if
 (6)
(6)
or equivalently
 (7)
(7)
3. Main Results
3.1. Stability and H¥ Performance Analysis
The following theorem gives a sufficient condition for the system (1) to have a specified  noise attenuation.
noise attenuation.
Theorem 1.Consider the system (1) with  and initial condition (2), for a given positive scalar
and initial condition (2), for a given positive scalar  if there exist symmetric positive definite matrices
if there exist symmetric positive definite matrices  satisfying
satisfying 



 and
and  such that the following matrix inequality
such that the following matrix inequality
 (8)
(8)
holds, then the system (1) is asymptotically stable and has a specified  noise attenuation
noise attenuation .
.
Proof: To prove that the system (1) is asymptotically stable, we choose a Lyapunov-Krasovskii functional [14]
 (9)
(9)
where



It is explicit that .
.
The forward difference along any trajectory of the system (1) with  and
and  is given by
is given by
 (10)
(10)
Applying Lemma 2 on matrix inequality (8), we obtain
 (11)
(11)
Thus, from (11), it implies that  Hence, system (1) is asymptotically stable.
Hence, system (1) is asymptotically stable.
In order to establish the  performance of the system (1) with the control input
performance of the system (1) with the control input  for
for  we consider
we consider
 (12)
(12)
It follows from matrix inequality (8) that
 (13)
(13)
Summing the inequality (13) over , we get
, we get
 (14)
(14)
which implies
 (15)
(15)
Inequality (15) can be re-written as
 (16)
(16)
Since 

 , and
, and  the inequality (16) leads to
the inequality (16) leads to
 (17)
(17)
Therefore, it follows from Definition 2 that the result of Theorem 1 is true. This completes the proof of Theorem 1.
When we consider the case of zero initial condition, then  performance measure (3) reduces to
performance measure (3) reduces to
 (18)
(18)
Using the 2-D Parseval’s theorem [31] , equation (18) is equivalent to
 (19)
(19)
where  represents the maximum singular value of the corresponding matrix and the transfer function from the noise input
represents the maximum singular value of the corresponding matrix and the transfer function from the noise input  to the controlled output
to the controlled output  for the system (1) is
for the system (1) is
 (20)
(20)
3.2. Robust Optimal H¥ Controller Design
Consider the system (1) and the following state feedback controller
 (21)
(21)
Applying the controller (21) to system (1) results in the following closed-loop system:
 (22a)
(22a)
 (22b)
(22b)
The following theorem presents a sufficient condition for the existence of a controller of the form (21) such that the closed-loop system (22) is asymptotically stable and the  norm of transfer function (20) from the noise input
norm of transfer function (20) from the noise input  to the controlled output
to the controlled output  for the closed-loop system (22) is smaller than g. Such controller is said to be a g-suboptimal robust
for the closed-loop system (22) is smaller than g. Such controller is said to be a g-suboptimal robust  state feedback controller for system (1).
state feedback controller for system (1).
Theorem 2. Consider the system (1) and initial condition (2). Given scalars  and
and , if there exist a matrix
, if there exist a matrix  and symmetric positive definite matrices
and symmetric positive definite matrices  such that
such that
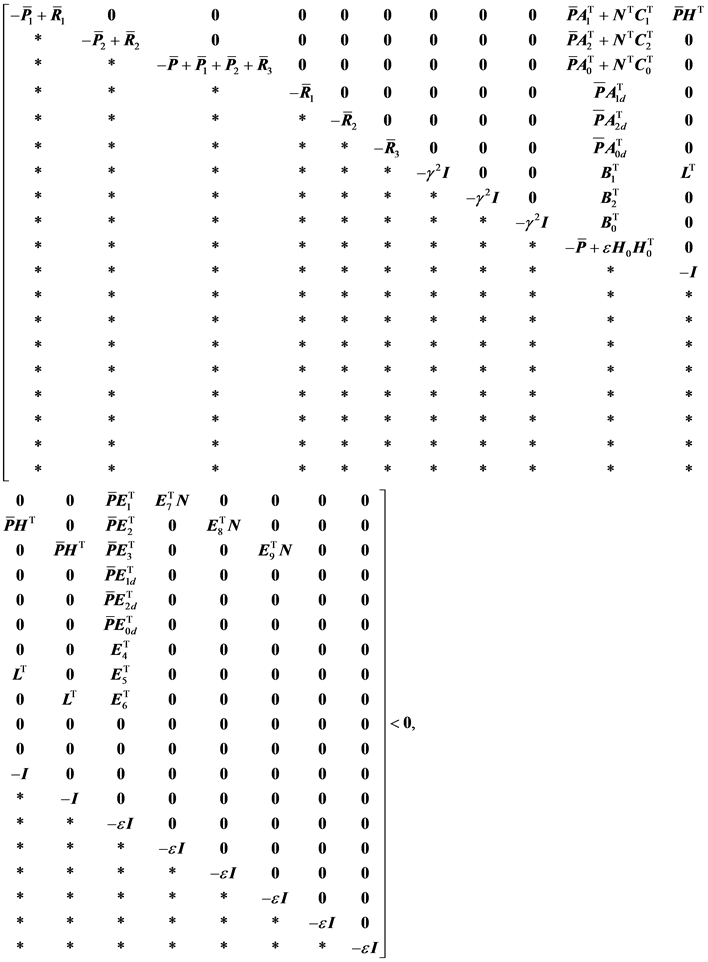 (23)
(23)
then the closed-loop system (22) has a specified  noise attenuation
noise attenuation  and controller (21) with
and controller (21) with
 (24)
(24)
is a g-suboptimal robust  state feedback controller for the system (1).
state feedback controller for the system (1).
Proof: Extending the matrix inequality (8) for the closed-loop system (22), we obtain
 (25)
(25)
Applying Lemma 1 on (25), we get
 (26)
(26)
Applying Lemma 2 in (26), we obtain
 (27)
(27)
Pre-multiplying and post-multiplying both sides of the inequality (27) by  we obtain
we obtain
 (28)
(28)
Denoting 
 and
and  in (28), the equivalence of (28) and (23) follows trivially from Lemma 2. This completes the proof of Theorem 2.
in (28), the equivalence of (28) and (23) follows trivially from Lemma 2. This completes the proof of Theorem 2.
Remark 1. Note that, if there is no uncertainty in system (1) and we set , then LMI (23) coincides with the criteria for the existence of
, then LMI (23) coincides with the criteria for the existence of  state feedback controllers for 2-D discrete state-delayed system given in [14] .
state feedback controllers for 2-D discrete state-delayed system given in [14] .
Theorem 2 presents a method of designing a set of g-suboptimal robust  state feedback controllers (if they exist) in terms of feasible solutions to the LMI (23). In particular, the robust optimal
state feedback controllers (if they exist) in terms of feasible solutions to the LMI (23). In particular, the robust optimal  controller which minimizes the
controller which minimizes the  noise attenuation g of the closed-loop system (22) can be determined by solving a certain optimization problem. Based on Theorem 2, the design problem of a robust optimal
noise attenuation g of the closed-loop system (22) can be determined by solving a certain optimization problem. Based on Theorem 2, the design problem of a robust optimal  controller can be formulated as
controller can be formulated as
 (29)
(29)
s.t. (23).
4. Illustrative Examples
In this section, two examples illustrating the effectiveness of our proposed method are presented.
Example 4.1: Consider an uncertain 2-D discrete state-delayed system given by (1) and initial condition (2) with
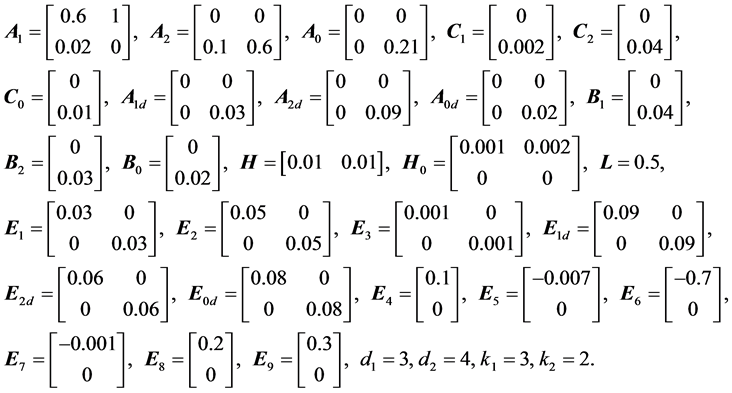 (30)
(30)
We wish to design a robust optimal  controller for the above system. Using the Matlab LMI toolbox [30] [32] , it is found that the optimization problem (29) is feasible for the present example and the optimal solution is given by
controller for the above system. Using the Matlab LMI toolbox [30] [32] , it is found that the optimization problem (29) is feasible for the present example and the optimal solution is given by
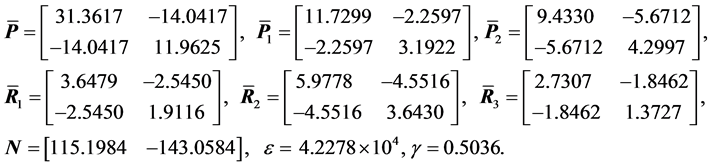 (31)
(31)
Thus, the robust optimal  state feedback controller is obtained as
state feedback controller is obtained as
 (32)
(32)
Figure 1 shows the frequency response from noise input  to the controlled output
to the controlled output  for the closed-loop system (22) over all frequencies i.e.
for the closed-loop system (22) over all frequencies i.e. ,
,  ,
, . The peak value of the frequency response is 0.5029, which is lower than the specified level of attenuation
. The peak value of the frequency response is 0.5029, which is lower than the specified level of attenuation 
Example 4.2: Consider the thermal processes in chemical reactors, heat exchangers and pipe furnaces [33]
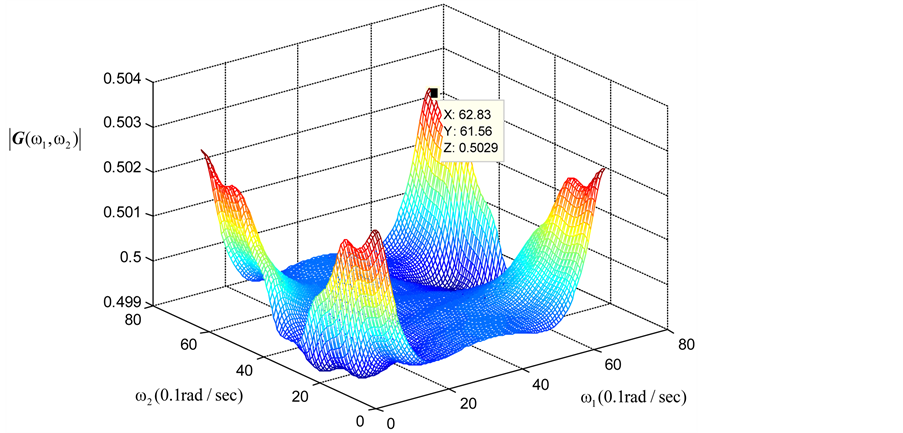
Figure 1. The frequency response .
.
[34] , which can be expressed by the following partial differential equation.
 (33)
(33)
where  is the temperature at space
is the temperature at space  and time
and time 
 is the input function,
is the input function,  and
and  are the time delays,
are the time delays,  and
and  are the space delays, and
are the space delays, and ,
,  ,
,  ,
,  , b are the real coefficients. Taking
, b are the real coefficients. Taking
 ,
, (34)
(34)
 ,
, (35)
(35)
(33) can be written in the following form:
 (36)
(36)
where 
 and,
and,  ,
,  is the integer function.
is the integer function.
It is assumed that the surface of the heat exchanger is insulated and the heat flow through it is in steady state
condition, then we could take the boundary conditions as  and
and , respectively.
, respectively.
Denoting  it is easy to verify that (36) can be converted into the following 2-D state-delayed GM:
it is easy to verify that (36) can be converted into the following 2-D state-delayed GM:
 (37)
(37)
Let 







 and the initial state satisfies the condition (2) with
and the initial state satisfies the condition (2) with ,
,  To consider the problem of
To consider the problem of  disturbance attenuation, the thermal process is modeled in the form (1) with
disturbance attenuation, the thermal process is modeled in the form (1) with
 (38)
(38)
It is also assumed that the above system is subjected to the parameter uncertainties of the form (1c) and (1d) with
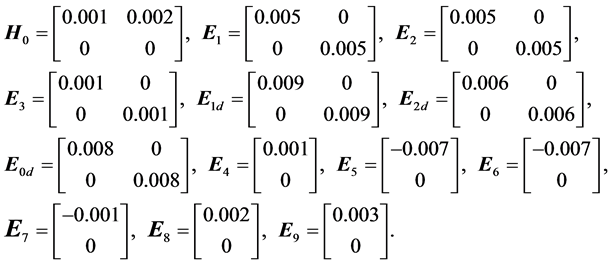 (39)
(39)
Now, using the Matlab LMI toolbox [30] [32] , it is found that the optimization problem (29) is feasible for the considered system and the optimal solution is obtained as
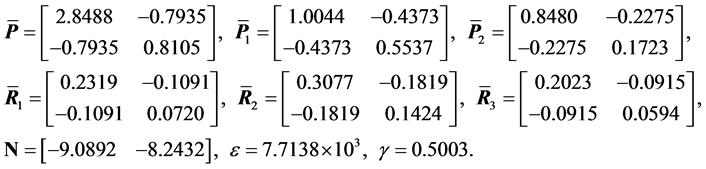 (40)
(40)
Thus, the robust optimal  state feedback controller is given as
state feedback controller is given as
 (41)
(41)
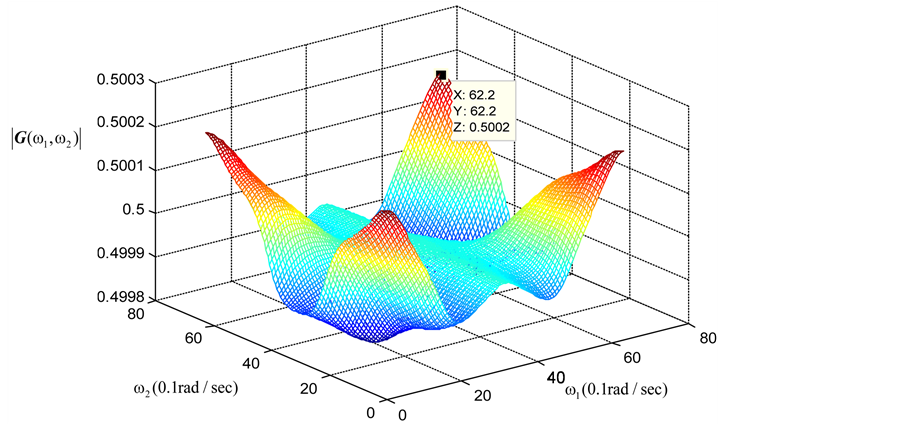
Figure 2. The frequency response .
.
Figure 2 shows the frequency response from noise input  to the controlled output
to the controlled output  for the closed-loop system (22) over all frequencies i.e.
for the closed-loop system (22) over all frequencies i.e. ,
,  ,
, . The peak value of the frequency response is 0.5002, which is lower than the above obtained specified level of attenuation
. The peak value of the frequency response is 0.5002, which is lower than the above obtained specified level of attenuation 
5. Conclusion
In this paper, the problem of robust optimal  control for a class of uncertain 2-D discrete state-delayed systems described by the GM has been studied. A sufficient condition for the existence of g-suboptimal robust
control for a class of uncertain 2-D discrete state-delayed systems described by the GM has been studied. A sufficient condition for the existence of g-suboptimal robust  state feedback controller has been derived in terms of the feasible solutions to a certain LMI. The desired robust optimal
state feedback controller has been derived in terms of the feasible solutions to a certain LMI. The desired robust optimal  controller has been obtained by solving a convex optimization problem. Finally, two illustrative examples have been provided to demonstrate the applicability of the proposed approach.
controller has been obtained by solving a convex optimization problem. Finally, two illustrative examples have been provided to demonstrate the applicability of the proposed approach.
Acknowledgements
The authors would like to thank the editor and the reviewers for their constructive comments and suggestions.
Cite this paper
Arun Kumar Singh,Amit Dhawan, (2016) Robust Optimal H∞ Control for Uncertain 2-D Discrete State-Delayed Systems Described by the General Model. Journal of Signal and Information Processing,07,78-114. doi: 10.4236/jsip.2016.72011
References
- 1. Xie, L., Du, C., Soh, Y. C. and Zhang, C. (2002) and Robust Control of 2-D Systems in FM Second Model. Multidimensional Systems and Signal Processing, 13, 265-287.
http://dx.doi.org/10.1023/A:1015808429836 - 2. Du, C., Xie, L. and Zhang, C. (2001) Control and Robust Stabilization Of Two-Dimensional Systems in Roesser Models. Automatica, 37, 205-211.
http://dx.doi.org/10.1016/S0005-1098(00)00155-2 - 3. Xu, H., Zou, Y., Xu, S. and Guo, L. (2008) Robust control for Uncertain Two-Dimensional Discrete Systems Described by the General Model via Output Feedback Controllers. International Journal of Control, Automation, and Systems, 6, 785-791.
- 4. Du, C., Xie, L. and Zhang, C. (2000) filtering of 2-D Discrete Systems. IEEE Transactions on Signal Processing, 48, 1760-1768.
http://dx.doi.org/10.1109/78.845933 - 5. Duan, Z. andXiang, Z. (2014) Output Feedback Stabilization of 2D Discrete Switched Systems in FM LSS Model. Circuits System Signal Processing, 33, 1095-1117.
http://dx.doi.org/10.1007/s00034-013-9680-6 - 6. Xu, H., Guo, L., Zou, Y. and Xu, S. (2007) Stability Analysis for Two-Dimensional Discrete State-Delayed Systems Described by General Models. IEEE International Conference on Control and Automation, Guangzhou, 30 May-1 June, 942-945.
- 7. Xu, J. and Yu, L. (2009) Delay-Dependent Guaranteed Cost Control for Uncertain 2-D Discrete Systems with State Delay in the FM Second Model. Journal of the Franklin Institute, 346, 159-174.
http://dx.doi.org/10.1016/j.jfranklin.2008.08.003 - 8. Ye, S., Wang, W. and Zou, Y. (2009) Robust Guaranteed Cost Control for a Class of Two-Dimensional Discrete Systems with Shift Delays. Multidimensional Systems and Signal Processing, 20, 297-307.
http://dx.doi.org/10.1007/s11045-008-0063-2 - 9. Tiwari, M. and Dhawan, A. (2012) Comment on “Robust Guaranteed Cost Control for a Class of Two-Dimensional Discrete Systems with Shift-Delays”. Multidimensional Systems and Signal Processing, 23, 415-419.
http://dx.doi.org/10.1007/s11045-011-0151-6 - 10. Tiwari, M. and Dhawan, A. (2012) An LMI Approach to Optimal Guaranteed Cost Control of Uncertain 2-D Discrete Shift-Delayed Systems via Memory State Feedback. Circuits, Systems and Signal Processing, 31, 1745-1764.
http://dx.doi.org/10.1007/s00034-012-9410-5 - 11. Huang, S. and Xiang, Z. (2014) Robust Reliable Control of Uncertain 2-D Discrete Switched Systems with State Delays. Transactions of the Institute of Measurement and Control, 36, 119-130.
http://dx.doi.org/10.1177/0142331213485277 - 12. Xu, H., Xu, S. and Lam, J. (2008) Positive Real Control for 2-D Discrete Delayed Systems via Output Feedback Controllers. Journal of Computational and Applied Mathematics, 216, 87-97.
http://dx.doi.org/10.1016/j.cam.2007.04.014 - 13. Xu, J. and Yu, L. (2009b) Delay-Dependent Control for 2-D Discrete State Delay Systems in the Second FM Model. Multidimensional Systems and Signal Processing, 20, 333-349.
http://dx.doi.org/10.1007/s11045-008-0074-z - 14. Xu, J. and Yu, L. (2008) Control for 2-D Discrete State Delayed Systems in the Second FM Model. Acta Automatica Sinica, 34, 809-813.
http://dx.doi.org/10.3724/SP.J.1004.2008.00809 - 15. Chen, S.F. and Fong, I.K. (2007) Delay-Dependent Robust Filtering for Uncertain 2-D State-Delayed Systems. Signal Processing, 87, 2659-2672.
http://dx.doi.org/10.1016/j.sigpro.2007.04.015 - 16. Feng, Z., Xu, L., Wu, M. and He, Y. (2010) Delay-Dependent Robust Stability and Stabilization of Uncertain Two- Dimensional Discrete Systems with Time-Varying Delays. IET Control Theory and Applications, 4, 1959-1971.
http://dx.doi.org/10.1049/iet-cta.2009.0284 - 17. Paszke, W., Lam, J., Galkowski, K., Xu, S. and Lin, Z. (2004) Robust Stability and Stabilization of 2-D Discrete State-Delayed Systems. Systems & Control Letters, 51, 277-291.
http://dx.doi.org/10.1016/j.sysconle.2003.09.003 - 18. Paszke, W., Lam, J., Galkowski, K., Xu, S. and Kummert, A. (2006) Delay-Dependent Stability of 2-D State-Delayed Linear Systems. Proceedings of IEEE International Symposium on Circuits and Systems, Island of Kos, 21-24 May 2006, 2813-2816.
- 19. Paszke, W., Lam, J., Galkowski, K., Xu, S. and Kummert, A. (2006) Delay-Dependent Stability Condition for Uncertain Linear 2-D State-Delayed Systems. Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, 13-15 December 2006, 2783-2788.
http://dx.doi.org/10.1109/CDC.2006.377239 - 20. Peng, D., Guan, X. and Long, C. (2008) Delay-Dependent Control for 2-D State-Delayed Systems. Proceedings of the 17th World Congress: The International Federation of Automatic Control, Seoul, 6-11 July 2008, 5856-5861.
http://dx.doi.org/10.3182/20080706-5-kr-1001.00988 - 21. Wang, L.-M., Yu, J.-X., Shi, J. and Gao, F.-R. (2015) Delay-Range Dependent Control for Uncertain 2-D Delayed Systems. Numerical Algebra, Control and Optimization, 5, 11-23.
http://dx.doi.org/10.3934/naco.2015.5.11 - 22. Wu, L.G., Wang, Z.D., Gao, H.J. and Wang, C.H. (2007) Filtering for Uncertain 2-D Discrete Systems with State Delays. Signal Processing, 87, 2213-2230.
http://dx.doi.org/10.1016/j.sigpro.2007.03.002 - 23. Xu, J. and Yu, L. (2006) Control for 2-D Discrete State-Delay Systems in Roesser Model. International Journal of Control, Automation and Systems, 4, 516-523.
- 24. Xu, J., Nan, Y., Zhang, G., Ou, L. and Ni, H. (2013) Delay-Dependent Control for Uncertain 2-D Discrete Systems with State-Delay in the Roesser Model. Circuits, Systems, and Signal Processing, 32, 1097-1112.
http://dx.doi.org/10.1007/s00034-012-9507-x - 25. Yao, J., Wang, W. and Zou, Y. (2013) The Delay-Range-Dependent Robust Stability Analysis for 2-D State-Delayed Systems with Uncertainty. Multidimensional Systems and Signal Processing, 24, 87-103.
http://dx.doi.org/10.1007/s11045-011-0156-1 - 26. Kurek, J.E. (1985) The General State-Space Model for a Two-Dimensional Linear Digital System. IEEE Transactions on Automatic Control, 30, 600-602.
http://dx.doi.org/10.1109/tac.1985.1103998 - 27. Dhawan, A. and Kar, H. (2007) Optimal Guaranteed Cost Control for 2-D Discrete Uncertain Systems: An LMI Approach. Signal Processing, 87, 3075-3085.
http://dx.doi.org/10.1016/j.sigpro.2007.06.001 - 28. Guan, X., Long, C. and Duan, G. (2001) Robust Optimal Guaranteed Cost Control for 2-D Discrete Systems. Proceedings of the IEE—Control Theory and Applications, 148, 335-361.
http://dx.doi.org/10.1049/ip-cta:20010596 - 29. Xie, L. and Soh, Y.C. (1995) Guaranteed Cost-Control of Uncertain Discrete-Time Systems. Control Theory and Advanced Technology, 10, 1235-1251.
- 30. Boyd, S., Ghaoui, L.E.I., Feron, E. and Balakrishnan, V. (1994) Linear Matrix Inequalities in System and Control Theory. SIAM, Philadelphia.
http://dx.doi.org/10.1137/1.9781611970777 - 31. Lu, W.S. and Antoniou, A. (1992) Two-Dimensional Digital Filters. Electrical Engineering and Electronics. Vol. 80, Marcel Dekker, New York.
- 32. Gahinet, P., Nemirovski, A., Laub, A.J., et al. (1995) LMI Toolbox for Use with Matlab. The Math Works Inc., Natick.
- 33. Kaczorek, T. (1985) Two-Dimensional Linear Systems. Lecture Notes in Control and Information Sciences. Vol. 68, Springer-Verlag, Berlin.
- 34. Tandon, A. and Dhawan, A. (2015) Non-Fragile Robust Optimal Guaranteed Cost Control of Uncertain 2-D Discrete State-Delayed Systems. International Journal of Systems Science, 47, 3303-3319.