International Journal of Modern Nonlinear Theory and Application
Vol.05 No.04(2016), Article ID:72114,14 pages
10.4236/ijmnta.2016.54017
The Dynamic Behavior of a Discrete Vertical and Horizontal Transmitted Disease Model under Constant Vaccination
Mingshan Li, Xiumin Liu, Xiaoliang Zhou*
School of Mathematics and Statistics, Lingnan Normal University, Zhanjiang, China

Copyright © 2016 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/



Received: October 16, 2016; Accepted: November 15, 2016; Published: November 18, 2016
ABSTRACT
In this paper, a class of discrete vertical and horizontal transmitted disease model under constant vaccination is researched. Under the hypothesis of population being constant size, the model is transformed into a planar map and its equilibrium points and the corresponding eigenvalues are solved out. By discussing the influence of coefficient parameters on the eigenvalues, the hyperbolicity of equilibrium points is determined. By getting the equations of flows on center manifold, the direction and stability of the transcritical bifurcation and flip bifurcation are discussed.
Keywords:
Vertical and Horizontal Transmission, Vaccination, Center Manifold, Transcritical Bifurcation, Flip Bifurcation

1. Introduction
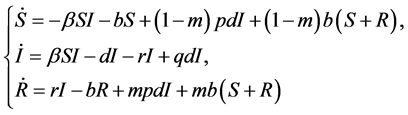
The SIR infections disease model is an important model and has been studied by many authors [1] - [8] . The basic and important research subjects for these systems are local and global stability of the disease-free equilibrium and the endemic equilibrium, existence of periodic solutions, persistence and extinction of the disease, etc. In recent years, the study of vaccination, treatment, and associated behavioral changes related to disease transmission has been the subject of intense theoretical analysis [4] [9] [10] [11] [12] . In 2008, Meng and Chen [13] considered a class of continuous vertical and horizontal transmitted epidemic model under constant vaccination
 (1)
(1)
where S represents the proportion of individuals susceptible to the disease, who are born (with b) and die (with d) at the same rate b (b = d) and have mean life expectancy . The susceptible become infectious at a bilinear rate
. The susceptible become infectious at a bilinear rate , where I is the proportion of infectious individuals and
, where I is the proportion of infectious individuals and  is the contact rate. The infectious recover (i.e. acquire lifelong immunity) at a rate r, so that
is the contact rate. The infectious recover (i.e. acquire lifelong immunity) at a rate r, so that  is the mean infectious period. The constant p, q, 0 < p < 1, 0 < q < 1, and p + q = 1, where p is the proportion of the offspring of infective parents that are susceptible individuals, and q is the proportion of the offspring of infective parents that are infective individuals. In their work, the basic reproductive rate determining the stability of disease-free equilibrium point and endemic equilibrium point was found out and the local and global stability of the equilibrium points have been researched by using Lyapunov function and Dulac function.
is the mean infectious period. The constant p, q, 0 < p < 1, 0 < q < 1, and p + q = 1, where p is the proportion of the offspring of infective parents that are susceptible individuals, and q is the proportion of the offspring of infective parents that are infective individuals. In their work, the basic reproductive rate determining the stability of disease-free equilibrium point and endemic equilibrium point was found out and the local and global stability of the equilibrium points have been researched by using Lyapunov function and Dulac function.
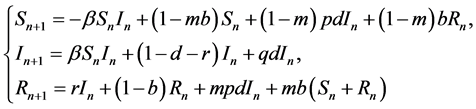
Due to a lot of discrete-time models are not trivial analogues of their continuous ones and simple discrete-time models can even exhibit complex behavior (see [14] ), in this paper, we pay attention to the discrete situation of Equation (1) as follows
 (2)
(2)
where ,
,  and
and  represent susceptible, infective and recovered subgroups, n represent a fixed time. Under the hypothesis of population being constant size, the model is transformed into a planar map and its equilibrium points and the corresponding eigenvalues are solved out. By discussing the influence of coefficient parameters on the eigenvalues, we determine the hyperbolicity of equilibrium points. Further, we get the equations of flows on center manifold and discuss the direction and stability of the transcritical bifurcation and flip bifurcation.
represent susceptible, infective and recovered subgroups, n represent a fixed time. Under the hypothesis of population being constant size, the model is transformed into a planar map and its equilibrium points and the corresponding eigenvalues are solved out. By discussing the influence of coefficient parameters on the eigenvalues, we determine the hyperbolicity of equilibrium points. Further, we get the equations of flows on center manifold and discuss the direction and stability of the transcritical bifurcation and flip bifurcation.
2. Hyperbolic and Non-Hyperbolic Cases
In this section, we will discuss the hyperbolic and non-hyperbolic cases in a two parameters space parameter. In view of assumption that population is a constant size, i.e.,
 (3)
(3)
system Equation (2) can be changed into
 (4)
(4)
Rewrite Equation (4) as a planar map F:
 (5)
(5)
It is obvious that this map has a disease-free equilibrium point  and an endemic equilibrium point
and an endemic equilibrium point  where
where
 ,
,  ,
, .
.
Theorem 1. The equilibrium point  is non-hyperbolic if and only if
is non-hyperbolic if and only if  lies on the lines:
lies on the lines:

And
 .
.
Otherwise, the equilibrium point  is an one of the following types: (See Table 1).
is an one of the following types: (See Table 1).
Proof. The Jacobian matrix of map (5) at  is:
is:

And its eigenvalues are
 ,
, .
.
From the assumption , we see that
, we see that . Then non-hyperbolic will be happened in the case
. Then non-hyperbolic will be happened in the case . From
. From  and
and , we get that
, we get that  and
and
 lies on
lies on . Also, from
. Also, from , we know
, we know  which means
which means  lies on
lies on . When
. When  (referred to the case
(referred to the case ), the eigenvalue
), the eigenvalue
 satisfies
satisfies , then the equilibrium point P is a saddle. When
, then the equilibrium point P is a saddle. When
 (referred to the case
(referred to the case ), the eigenvalue
), the eigenvalue  satisfie
satisfie ,
,
so the equilibrium point P is a stable node and meanwhile when  (referred to the case
(referred to the case ), the equilibrium point P is a saddle since
), the equilibrium point P is a saddle since . The proof is complete.
. The proof is complete.
Theorem 2. We select s, r as parameters. There does not exist non-hyperbolic case for the equilibrium . But the hyperbolicity can be divided into the following cases (I), (II).
. But the hyperbolicity can be divided into the following cases (I), (II).
(I) When , there exist six types for hyperbolic equilibrium point Q: (See Table 2).
, there exist six types for hyperbolic equilibrium point Q: (See Table 2).

Table 1. Types of hyperbolic equilibrium point .
.
Table 2. Types of hyperbolic equilibrium point .
.
Where  satisfy
satisfy


respectively.
(II) When , there exist four types for hyperbolic equilibrium point Q: (See Table 3).
, there exist four types for hyperbolic equilibrium point Q: (See Table 3).
Where  satisfies
satisfies .
.
Proof. Performing a coordinate shift as follows:
 ,
, 
and letting  denote the transformed F, we translate equilibrium
denote the transformed F, we translate equilibrium  into
into  and discuss equilibrium point
and discuss equilibrium point  of the map
of the map . The matrix of linearization of
. The matrix of linearization of  at
at  is
is

where ,
, . Its eigenvalues are
. Its eigenvalues are

Table 3. Types of hyperbolic equilibrium .
.

It is known that  is hyperbolic if and only if none of eigenvalues
is hyperbolic if and only if none of eigenvalues ,
,  lies on the unit circle
lies on the unit circle . In the following we discuss the eigenvalues in two case, i.e.,
. In the following we discuss the eigenvalues in two case, i.e.,  and
and .
.
(I) 
When discriminant , then
, then  and
and  are both real . Because non-hyperbolicity happens if and only if
are both real . Because non-hyperbolicity happens if and only if  or
or . For whether
. For whether  or
or , we can get
, we can get . By condition
. By condition
 and
and , we see that
, we see that . This is a contradiction with
. This is a contradiction with  and
and , so
, so  and
and  are impossible. Next, let’s examine
are impossible. Next, let’s examine  and
and . From
. From
whether  or
or , we can get
, we can get , By condition
, By condition  we see that
we see that ,
,  , This is a contra-
, This is a contra-
diction with , so
, so  and
and  are impossible.
are impossible.
When ,
,  and
and  are a pair of conjugate complex. Since
are a pair of conjugate complex. Since

Therefore,  and
and  lie inside of
lie inside of  and the equilibrium point Q is a stable focus referred to the case
and the equilibrium point Q is a stable focus referred to the case .
.
When , the equilibrium point Q Is hyperbolic. If
, the equilibrium point Q Is hyperbolic. If , i.e.
, i.e.

The matrix has a double real eigenvalue . From the constraint condition
. From the constraint condition , it is obvious that
, it is obvious that . Therefore, equilibrium point Q is stable node in the case of
. Therefore, equilibrium point Q is stable node in the case of  and
and .
.
If , i.e.,
, i.e.,  and
and , the eigenvalue
, the eigenvalue  and
and  are different real numbers. We first discuss the case that
are different real numbers. We first discuss the case that , i.e.,
, i.e.,  , In this case we have
, In this case we have

and

We have  for
for , On the other hand, there also exists
, On the other hand, there also exists  for
for . In fact, since
. In fact, since

and

We have . Therefore, the equilibrium Q is a stable node as
. Therefore, the equilibrium Q is a stable node as  .
.
For the case , i.e.,
, i.e.,  , we have
, we have  and
and

and
 ,
,
 (6)
(6)
We assume , by condition
, by condition , we see that
, we see that
 , i.e.,
, i.e.,  and by condition
and by condition . This is a con-
. This is a con-
tradiction with  and
and . So
. So  are impossible,
are impossible,
i.e., . Therefore, we have
. Therefore, we have . Therefore, the equilibrium Q is a stable node as
. Therefore, the equilibrium Q is a stable node as .
.
Finally, we study the case of ,
, . We have
. We have


Then, we have  for
for . Moreover, there also has
. Moreover, there also has  for
for . In fact that,
. In fact that,


and

We have . This means that the equilibrium Q is a stable node for
. This means that the equilibrium Q is a stable node for .
.
(II) 
When discriminant , because non-hyperbolicity happens if and only if
, because non-hyperbolicity happens if and only if  or
or . Similar to the proof in case (I), neither
. Similar to the proof in case (I), neither  nor
nor  is possible.
is possible.
When ,
,  and
and  are a pair of conjugate complex. Since
are a pair of conjugate complex. Since

Therefore,  and
and  lie inside of
lie inside of  and the equilibrium point Q is a stable node referred to the case
and the equilibrium point Q is a stable node referred to the case .
.
When , the equilibrium point Q is hyperbolic. If
, the equilibrium point Q is hyperbolic. If , the matrix has a
, the matrix has a
double real eigenvalue . From the constraint condition
. From the constraint condition ,
,
it is obvious that . Therefore, equilibrium point Q is stable node in the case of
. Therefore, equilibrium point Q is stable node in the case of . If
. If , we first discuss the case that
, we first discuss the case that , i.e.,
, i.e.,  , In this case we have
, In this case we have

We have  for
for , On the other hand, there also exists
, On the other hand, there also exists  for
for
 . In fact, since
. In fact, since  Therefore, we have
Therefore, we have .
.
Therefore, the equilibrium Q is a saddle as .
.
Finally, we study the case of , i.e.
, i.e. , We easily prove
, We easily prove  by same methods as in case (I). This means that the equilibrium Q is a stable node for
by same methods as in case (I). This means that the equilibrium Q is a stable node for . The proof is complete.
. The proof is complete.
3. Transcritical Bifurcation of the Model
The following lemmas were be derived from reference [15] .
Lemma 1. ( [15] , Theorem 2.1.4) The map
 (7)
(7)
satisfies that A is cxc matrix with eigenvalues of modulus one, and B is sxs matrix with eigenvalues of modulus less than one, and

where f and g are  (
( ) in some neighborhood of the origin. Then there exists a
) in some neighborhood of the origin. Then there exists a  center manifold for equation (7) which can be locally represented as a graph as follows
center manifold for equation (7) which can be locally represented as a graph as follows

For  sufficiently small. Moreover, the dynamics of equation (4.1) restricted to the center manifold is, for
sufficiently small. Moreover, the dynamics of equation (4.1) restricted to the center manifold is, for  sufficiently small, given by the c-dimensional map
sufficiently small, given by the c-dimensional map

Lemma 2. ( [15] , in page 365) A one-parameter family of  (
( ) one-dimensional
) one-dimensional
maps
 (8)
(8)
Having a non-hyperbolic fixed point, i.e.,

Undergoes a transcritical bifurcation at  if
if

Theorem 3. A transcritical bifurcation occurs at the equilibrium  when
when . More concretely, for
. More concretely, for  slightly there are two equilibriums: a stable point P and an unstable negative equilibrium which coalesce at
slightly there are two equilibriums: a stable point P and an unstable negative equilibrium which coalesce at , for
, for  slightly there are also two equilibriums: an unstable equilibrium P and a stable positive equilibrium Q. Thus an exchange of stability has occurred at
slightly there are also two equilibriums: an unstable equilibrium P and a stable positive equilibrium Q. Thus an exchange of stability has occurred at .
.
Proof. For , we have
, we have  and
and . Consider
. Consider  as the bifurcation parameter and write F as
as the bifurcation parameter and write F as  to emphasize the dependence on
to emphasize the dependence on . Performing a coordinate shift as follows
. Performing a coordinate shift as follows ,
, . One can easily see that the matrix
. One can easily see that the matrix  is
is

and it has eigenvectors
 ,
, (9)
(9)
Corresponding to  and
and  respectively, where T means the transpose of matrices. First, we put the matrix
respectively, where T means the transpose of matrices. First, we put the matrix  into a diagonal form. Using the eigenvectors (9), we obtain the transformation
into a diagonal form. Using the eigenvectors (9), we obtain the transformation
 (10)
(10)
with inverse
 (11)
(11)
which transform system Equation (5) into
 (12)
(12)
where
 (13)
(13)
Rewrite system (12) in the suspended form with assumption ,
,
 (14)
(14)
where

Thus, from Lemma 1, the stability of equilibrium  near
near  can be determined by studying an one parameter family of map on a center manifold which can be represented as follows,
can be determined by studying an one parameter family of map on a center manifold which can be represented as follows,

for sufficiently small v and .
.
We now want to compute the center manifold and derive the mapping on the center manifold. We assume
 (15)
(15)
near the origin, where  means terms of order
means terms of order . By Lemma 1, those coefficients
. By Lemma 1, those coefficients  can be determined by the equation
can be determined by the equation
 (16)
(16)
Substituting (16)into (15) and comparing coefficients of  and
and  in (15), we get
in (15), we get

from which we solve

Therefore, the expression of (15) is approximately determined:
 (17)
(17)
Substituting (17) into (14), we obtain a one dimensional map reduced to the center manifold
 (18)
(18)
It is easy to check that
 (19)
(19)
The condition (19) implies that in the study of the orbit structure near the bifurcation point terms of  do not qualitatively affect the nature of the bifurcation, namely they do not affect the geometry of the curves of equilibriums passing through the bifurcation point. Thus, the orbit structure of (18) near
do not qualitatively affect the nature of the bifurcation, namely they do not affect the geometry of the curves of equilibriums passing through the bifurcation point. Thus, the orbit structure of (18) near  is qualitatively the same as the orbit structure near
is qualitatively the same as the orbit structure near  of the map
of the map
 (20)
(20)
Map (20) can be viewed as truncated normal form for the transcritical bifurcation (see Lemma 2). The stability of the two branches of equilibriums lying on both sides of  are easily verified.
are easily verified.
4. Degenerate Flip Bifurcation of the Model
This section is devoted to the analysis for the case . From section 2, we
. From section 2, we
have  for
for . For this case, degenerate flip
. For this case, degenerate flip
bifurcation happens at the equilibrium point .
.
Theorem 4. For map (5) when , degenerate flip bifurcation happens at the equilibrium point
, degenerate flip bifurcation happens at the equilibrium point .
.
Proof. Performing a coordinate shift as follows
 ,
,  ,
,
We translate equilibrium  into
into , and letting
, and letting  denote the transformed
denote the transformed 
 (21)
(21)
Therefore, we discuss equilibrium point  of the map
of the map . The matrix of linearization of
. The matrix of linearization of  at
at  is
is

For , considering
, considering  as the bifurcation parameter and write
as the bifurcation parameter and write  as
as  to emphasize the dependence on w. Therefore, we have
to emphasize the dependence on w. Therefore, we have
 (22)
(22)
The matrix have eigenvectors  and
and  corresponding
corresponding
to  and
and . Therefore, by transformation
. Therefore, by transformation
 (23)
(23)
where
 .
.
Therefore, we obtain the inverse of transformation (23)
 (24)
(24)
Therefore  can be changed into the maps:
can be changed into the maps: 
 (25)
(25)
where
 ,
, .
.
Rewrite system (25) in the suspended form
 (26)
(26)
where
 ,
,  ,
,
 ,
, .
.
Equivalently, the suspended system (26) has a two-dimensional center manifold of the form
 (27)
(27)
Near the origin, where  means terms of order
means terms of order . By Lemma 1, those coefficients
. By Lemma 1, those coefficients  can be determined by the equation
can be determined by the equation
 (28)
(28)
Then
 (29)
(29)
Comparing coefficients of ,
,  and
and  in (27), we get
in (27), we get

from which we solve

Thus, the expression of (27)is determined, i.e.,
 (30)
(30)
Substituting (30) into the first equation in (26), we obtain a one-dimensional map , where
, where
 (31)
(31)
From (31), we can check that
 (32)
(32)
 (33)
(33)
Thus, the conditions  and
and  of Theorem 3.5.1 in [16] are not satisfied. Therefore, this is a degenerate flip bifurcation.
of Theorem 3.5.1 in [16] are not satisfied. Therefore, this is a degenerate flip bifurcation.
5. Conclusion
Due to a lot of discrete-time models are not trivial analogues of their continuous ones and simple discrete-time models can even exhibit complex behavior (see [14] ), motivated mainly by Meng and Chen [13] considering a class of continuous vertical and horizontal transmitted epidemic model (1) under constant vaccination, we study a class of discrete vertical and horizontal transmitted disease model (2) under constant vaccination. By detailed studies, we found discrete model (2) has a flip bifurcation which did not occurred for continuous model. However, the result of flip bifurcation in current paper is a degenerate situation, for which the more in-depth research needs to be continued.
Acknowledgements
This work has been supported by the Innovation and Developing School Project of Department of Education of Guangdong province (Grant No. 2014KZDXM065) and the Key project of Science and Technology Innovation of Guangdong College Students (Grant No. pdjh2016a0301).
Cite this paper
Li, M.S., Liu, X.M. and Zhou, X.L. (2016) The Dynamic Behavior of a Discrete Vertical and Horizontal Transmitted Disease Model under Constant Vaccination. International Journal of Mo- dern Nonlinear Theory and Application, 5, 171-184. http://dx.doi.org/10.4236/ijmnta.2016.54017
References
- 1. Piyawong, W., Twizell, E.H. and Gumel, A.B. (2003) An Unconditionally Convergent Finite-Difference Scheme for the SIR Model. Applied Mathematics and Computation, 146, 611-625.
https://doi.org/10.1016/S0096-3003(02)00607-0 - 2. Pourabbas, E., d’Onofrio, A. and Rafanelli, M. (2001) A Method to Estimate the Incidence of Communicable Diseases under Seasonal Fluctuations with Application to Cholera. Applied Mathematics and Computation, 118, 161-174.
https:/doi.org/10.1016/S0096-3003(99)00212-X - 3. Beretta, E. and Takeuchi, Y. (1997) Convergence Results in SIR Epidemic Model with Varying Population Sizes. Nonlinear Analysis, 28, 1909-1921.
https://doi.org/10.1016/S0362-546X(96)00035-1 - 4. Meng, X., Chen, L. and Song, Z. (2007) The Global Dynamics Behaviors for a New Delay SEIR Epidemic Disease Model with Vertical Transmission and Pulse Vaccination. Applied Mathematics and Computation, 28, 1259-1271.
https://doi.org/10.1007/s10483-007-0914-x - 5. Allen, L.J.S. (1994) Some Discrete-Time SI, SIR and SIS Epidemic Models. Mathematical Biosciences, 124, 83-105.
https://doi.org/10.1016/0025-5564(94)90025-6 - 6. Ma, Z. Zhou, Y. Wang, W. and Jin, Z. (2004) Mathematical Modelling and Research of Epidemic Dynamical Systems (in Chinese). Science Press, Beijing.
- 7. Zhou, X., Li, X. and Wang, W.S. (2014) Bifurcations for a Deterministic SIR Epidemic Model in Discrete Time. Advances in Difference Equations, 168.
https://doi.org/10.1186/1687-1847-2014-168 - 8. Liao, X., Wang, H., Huang, X., Zeng, W. and Zhou, X. (2015) The Dynamic Properties of a Deterministic SIR Epidemic Model in Discrete Time. Applied Mathematics, 6, 1665-1675.
https://doi.org/10.4236/am.2015.610148 - 9. Meng, X., Chen, L. and Cheng, H. (2007) Two Profitless Delays for the SEIRS Epidemic Disease Model with Nonlinear Incidence and Pulse Vaccination. Applied Mathematics and Computation, 186, 516-529.
https://doi.org/10.1016/j.amc.2006.07.124 - 10. Agur, Z.L., et al. (1993) Pulse Mass Measles Vaccination across Age Cohorts. Proceedings of the National Academy of Sciences of the USA, 90, 11698-11702.
https://doi.org/10.1073/pnas.90.24.11698 - 11. Shulgin, B., et al. (1998) Pulse Vaccination Strategy in the SIR Epidemic Model. Bulletin of Mathematical Biology, 60, 1-26.
https://doi.org/10.1016/S0092-8240(98)90005-2 - 12. Meng, X., Chen, L. and Song, Z. (2007) The Global Dynamics Behaviors for a New Delay SEIR Epidemic Disease Model with Vertical Transmission and Pulse Vaccination. Applied Mathematics and Mechanics (English Edition), 28, 1259-1271.
https://doi.org/10.1007/s10483-007-0914-x - 13. Meng, X. and Chen, L. (2008) The Dynamics of a New SIR Epidemic Model Concerning Pulse Vaccination Strategy. Applied Mathematics and Computation, 197, 582-597.
https://doi.org/10.1016/j.amc.2007.07.083 - 14. Anderson, R.M. and May, R.M. (1991) Infections Diseases of Humans: Dynamics and Control. Oxford University Press, Oxford.
- 15. Wiggins, S. (1990) Introduction to Applied Nonlinear Dynamical Systems and Chaos. Springer, New York.
https://doi.org/10.1007/978-1-4757-4067-7 - 16. Guckenheimer, J. and Holmes, P. (1983) Nonlinear Oscillations, Dynamical Systems and Bifurcations of Vector Fields. Springer, New York.
https://doi.org/10.1007/978-1-4612-1140-2