Advances in Linear Algebra & Matrix Theory
Vol.05 No.04(2015), Article ID:61736,11 pages
10.4236/alamt.2015.54016
A Generalization of Cramer’s Rule
Hugo Leiva
Department of Mathematics, Louisiana State University, Baton Rouge, LA, USA

Copyright © 2015 by author and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 27 April 2014; accepted 4 December 2015; published 7 December 2015
ABSTRACT
In this paper, we find two formulas for the solutions of the following linear equation
 , where
, where  is a
is a  real matrix. This system has been well studied since the 1970s. It is known and simple proven that there is a solution for all
real matrix. This system has been well studied since the 1970s. It is known and simple proven that there is a solution for all  if, and only if, the rows of A are linearly independent, and the minimum norm solution is given by the Moore-Penrose inverse formula, which is often denoted by
if, and only if, the rows of A are linearly independent, and the minimum norm solution is given by the Moore-Penrose inverse formula, which is often denoted by ; in this case, this solution is given by
; in this case, this solution is given by . Using this formula, Cramer’s Rule and Burgstahler’s Theorem (Theorem 2), we prove the following representation for this solution
. Using this formula, Cramer’s Rule and Burgstahler’s Theorem (Theorem 2), we prove the following representation for this solution
 , where
, where  are the row vectors of the matrix A. To the best of our knowledge and looking in to many Linear Algebra books, there is not formula for this solution depending on determinants. Of course, this formula coincides with the one given by Cramer’s Rule when
are the row vectors of the matrix A. To the best of our knowledge and looking in to many Linear Algebra books, there is not formula for this solution depending on determinants. Of course, this formula coincides with the one given by Cramer’s Rule when .
.
Keywords:
Linear Equation, Cramer’s Rule, Generalized Formula

1. Introduction
In this paper, we find a formula depending on determinants for the solutions of the following linear equation
 (1)
(1)
or
 (2)
(2)
Now, if we define the column vectors
then the system (2) also can be written as follows:
 (3)
(3)
where  denotes the innerproduct in
denotes the innerproduct in  and A is
and A is  real matrix. Usually, one can apply Gauss Elimination Method to find some solutions of this system, and this method is a systematic procedure for solving systems like (1); it is based on the idea of reducing the augmented matrix
real matrix. Usually, one can apply Gauss Elimination Method to find some solutions of this system, and this method is a systematic procedure for solving systems like (1); it is based on the idea of reducing the augmented matrix
 (4)
(4)
to the form that is simple enough such that the system of equations can be solved by inspection. But, to my knowledge, in general there is not formula for the solutions of (1) in terms of determinants if .
.
When  and
and , the system (1) admits only one solution given by
, the system (1) admits only one solution given by , and from here one can deduce the well known Cramer Rule which says:
, and from here one can deduce the well known Cramer Rule which says:
Theorem 1.1. (Cramer Rule 1704-1752) If A is  matrix with
matrix with , then the solution of the system (1) is given by the formula:
, then the solution of the system (1) is given by the formula:
 (5)
(5)
where  is the matrix obtained by replacing the entries in the ith column of A by the entries in the matrix
is the matrix obtained by replacing the entries in the ith column of A by the entries in the matrix

A simple and interested generalization of Cramer Rule is done by Prof. Dr. Sylvan Burgstahler ( [1] ) from University of Minnesota, Duluth, where he taught for 20 years. This result is given by the following Theorem:
Theorem 1.2. (Burgstahler 1983) If the system of equations
 (6)
(6)
has(unique) solution , then for all
, then for all  one has
one has
 . (7)
. (7)
Using Moore-Penrose Inverse Formula and Cramer’s Rule, one can prove the following Theorem. But, for better understanding of the reader, we will include here a direct proof of it.
Theorem 1.3. For all , the system (1) is solvable if, and only if,
, the system (1) is solvable if, and only if,
 (8)
(8)
Moreover, one solution for this equation is given by the following formula:
 (9)
(9)
where  is the transpose of A (or the conjugate transpose of A in the complex case).
is the transpose of A (or the conjugate transpose of A in the complex case).
Also, this solution coincides with the Cramer formula when . In fact, this formula is given as follows:
. In fact, this formula is given as follows:
 (10)
(10)
where  is the matrix obtained by replacing the entries in the jth column of
is the matrix obtained by replacing the entries in the jth column of  by the entries in the matrix
by the entries in the matrix
In addition, this solution has minimum norm, i.e.,
 (11)
(11)
and .
.
The main results of this work are the following Theorems.
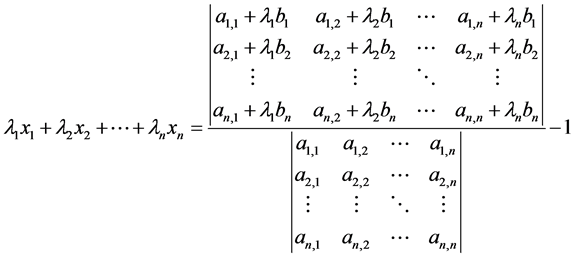
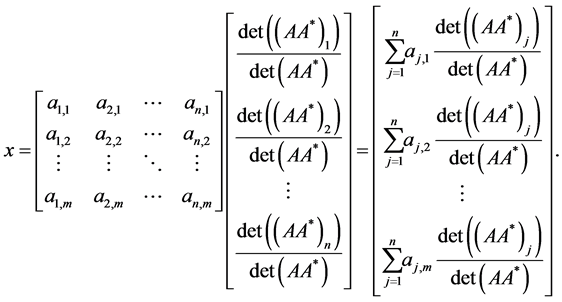
Theorem 1.4. The solutions of (1)-(3) given by (9) can be written as follows:
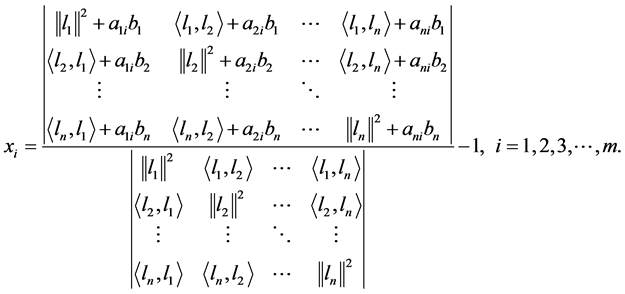 (12)
(12)
Theorem 1.5. The system (1) is solvable for each , if, and only if, the set of vectors
, if, and only if, the set of vectors  formed by the rows of the matrix A is lineally independent in
formed by the rows of the matrix A is lineally independent in .
.
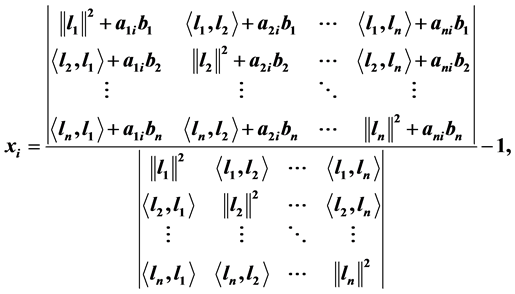
Moreover, a solution for the system (1) is given by the following formula:
 (13)
(13)
 (14)
(14)
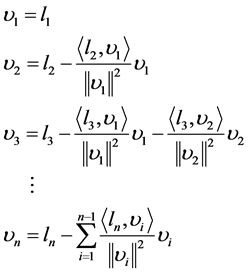
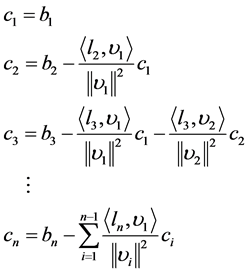
where the set of vectors  is obtain by the Gram-Schmidt process and the numbers
is obtain by the Gram-Schmidt process and the numbers  are given by
are given by
 (15)
(15)
and .
.
2. Proof of the Main Theorems
In this section we shall prove Theorems 1.3, 1.4, 1.5 and more. To this end, we shall denote by  the Euclidian innerproduct in
the Euclidian innerproduct in  and the associated norm by
and the associated norm by . Also, we shall use some ideas from [2] and the following result from [3] , pp 55.
. Also, we shall use some ideas from [2] and the following result from [3] , pp 55.
Lemma 2.1. Let W and Z be Hilbert space,  and
and  the adjoint operator, then the following statements holds,
the adjoint operator, then the following statements holds,
[(i)]  such that
such that
[(ii)] .
.
We will include here a direct proof of Theorem 1.3 just for better understanding of the reader.
Proof of Theorem 1.3. The matrix A may also viewed as a linear operator ; therefore
; therefore  and its adjoint operator
and its adjoint operator  is the transpose of A and
is the transpose of A and .
.
Then, system (1) is solvable for all  if, and only if, the operator A is surjective. Hence, from the Lemma 2.1 there exists
if, and only if, the operator A is surjective. Hence, from the Lemma 2.1 there exists  such that
such that

Therefore,

This implies that  is one to one. Since
is one to one. Since  is a
is a  matrix, then
matrix, then .
.
Suppose now that . Then
. Then  exists and given
exists and given  we can see that
we can see that  is a solution of
is a solution of .
.
Now, since  is the only solution of the equation
is the only solution of the equation
then from Theorem 1.1 (Cramer Rule) we obtain that:

where  is the matrix obtained by replacing the entries in the ith column of
is the matrix obtained by replacing the entries in the ith column of  by the entries in the matrix
by the entries in the matrix

Then, the solution  of (1) can be written as follows
of (1) can be written as follows
Now, we shall see that this solution has minimum norm. In fact, consider w in  such that
such that  and
and

On the other hand,

Hence, .
.
Therefore,  , and
, and  if
if .
.
Proof of Theorem 1.5. Suppose the system is solvable for all . Now, assume the existence of real numbers
. Now, assume the existence of real numbers  such that
such that

Then, there exists  such that
such that
 .
.
In other words,

Hence,

So,

Therefore,  , which prove the independence of
, which prove the independence of .
.
Now, suppose that the set  is linearly independent in
is linearly independent in . Using the Gram-Schmidt process we can find a set
. Using the Gram-Schmidt process we can find a set  of orthogonal vectors in
of orthogonal vectors in  given by the formula:
given by the formula:
 . (16)
. (16)
Then, system (1) will be equivalent to the following system:
 , (17)
, (17)
where
 . (18)
. (18)
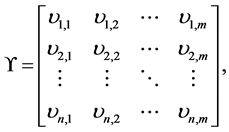
If we denote the vectors ’s by
’s by

and the  matrix
matrix  by
by
then, applying Theorem 1.3 we obtain that system (17) has solution for all  if, and only if,
if, and only if,  . But,
. But,
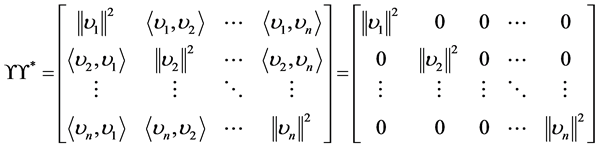 .
.
So,

From here and using the formula (9) we complete the proof of this Theorem.
Examples and Particular Cases
In this section we shall consider some particular cases and examples to illustrate the results of this work.
Example 2.1. Consider the following particular case of system (1)
 (19)
(19)
In this case  and
and . Then, if we define the column vector
. Then, if we define the column vector

Then,  and
and
Therefore, a solution of the system (19) is given by:
 (20)
(20)
Example 2.2. Consider the following particular case of system (1)
 (21)
(21)
In this case  and
and
Then, if we define the column vectors
then
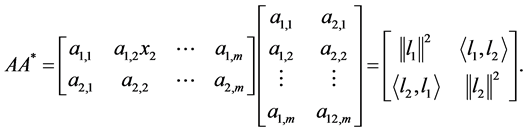
Hence, from the formula (10) we obtain that:
 .
.
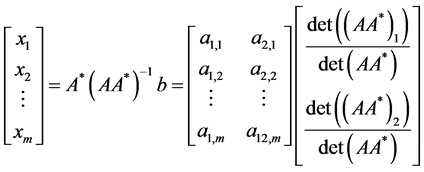
Therefore, a solution of the system (21) is given by:
 (22)
(22)
 (23)
(23)
 (24)
(24)
 . (25)
. (25)
Now, we shall apply the foregoing formula or (12) to find the solution of the following system
 . (26)
. (26)
If we define the column vectors
then  and
and ,
,  , and
, and .
.
Example 2.3. Consider the following general case of system (1)
 . (27)
. (27)
Then, if  is an orthogonal set in
is an orthogonal set in , we get
, we get

and the solution of the system (1) is very simple and given by:
 (28)
(28)
Now, we shall apply the formula (28) or (12) to find solution of the following system:
 . (29)
. (29)
If we define the column vectors

Then,  is an orthogonal set in
is an orthogonal set in  and the solution of this system is given by:
and the solution of this system is given by: ,
,  ,
,  and
and .
.
3. Variational Method to Obtain Solutions
Theorems 1.3, 1.4 and 1.5 give a formula for one solution of the system (1) which has minimum norma. But it is not the only way allowing to build solutions of this equation. Next, we shall present a variational method to obtain solutions of (1) as a minimum of the quadratic functional ,
,
 (30)
(30)
Proposition 3.1. For a given  the Equation (1) has a solution
the Equation (1) has a solution  if, and only if,
if, and only if,
 (31)
(31)
It is easy to see that (31) is in fact an optimality condition for the critical points of the quadratic functional j define above.
Lemma 3.1. Suppose the quadratic functional j has a minimizer . Then,
. Then,
 (32)
(32)
is a solution of (1).
Proof. First, we observe that j has the following form:

Then, if  is a point where j achieves its minimum value, we obtain that:
is a point where j achieves its minimum value, we obtain that:

So,  and
and  is a solution of (1).
is a solution of (1).
Remark 3.1. Under the condition of Theorem 1.3, the solution given by the formulas (32) and (9) coincide.
Theorem 3.1. The system (1) is solvable if, and only if, the quadratic functional j defined by (30) has a minimum for all .
.
Proof. Suppose (8) is solvable. Then, the matrix A viewed as an operator from  to
to  is surjective. Hence, from Lemma 2.1. there exists
is surjective. Hence, from Lemma 2.1. there exists  such that
such that

Then,

Therefore,
Consequently, j is coercive and the existence of a minimum is ensured.
The other way of the proof follows as in proposition 3.1.
Now, we shall consider an example where Theorems 1.3, 1.4 and 1.5 can not be applied, but proposition 3.1 does.
Example 3.1. It considers the system with linearly independent rows
 .
.
In this case  and
and

Then

Therefore, the critical points of the quadratic functional j given by (30) satisfy the equation:

i.e.,
 .
.
So, there are infinitely many critical points given by

Hence, a solution of the system is given by
 .
.
Cite this paper
Hugo Leiva, (2015) A Generalization of Cramer’s Rule. Advances in Linear Algebra & Matrix Theory,05,156-166. doi: 10.4236/alamt.2015.54016
References
- 1. Burgstahier, S. (1983) A Generalization of Cramer’s Rulle. The Two-Year College Mathematics Journal, 14, 203-205.
http://dx.doi.org/10.2307/3027088 - 2. Iturriaga, E. and Leiva, H. (2007) A Necessary and Sufficient Conditions for the Controllability of Linear System in Hilbert Spaces and Applications. IMA Journal Mathematical and Information, 25, 269-280.
http://dx.doi.org/10.1093/imamci/dnm017 - 3. Curtain, R.F. and Pritchard, A.J. (1978) Infinite Dimensional Linear Systems. Lecture Notes in Control and Information Sciences, Vol. 8, Springer Verlag, Berlin.