Fault Ride-Through Study of Wind Turbines
Copyright © 2013 SciRes. JPEE
(a)
(b)
(c)
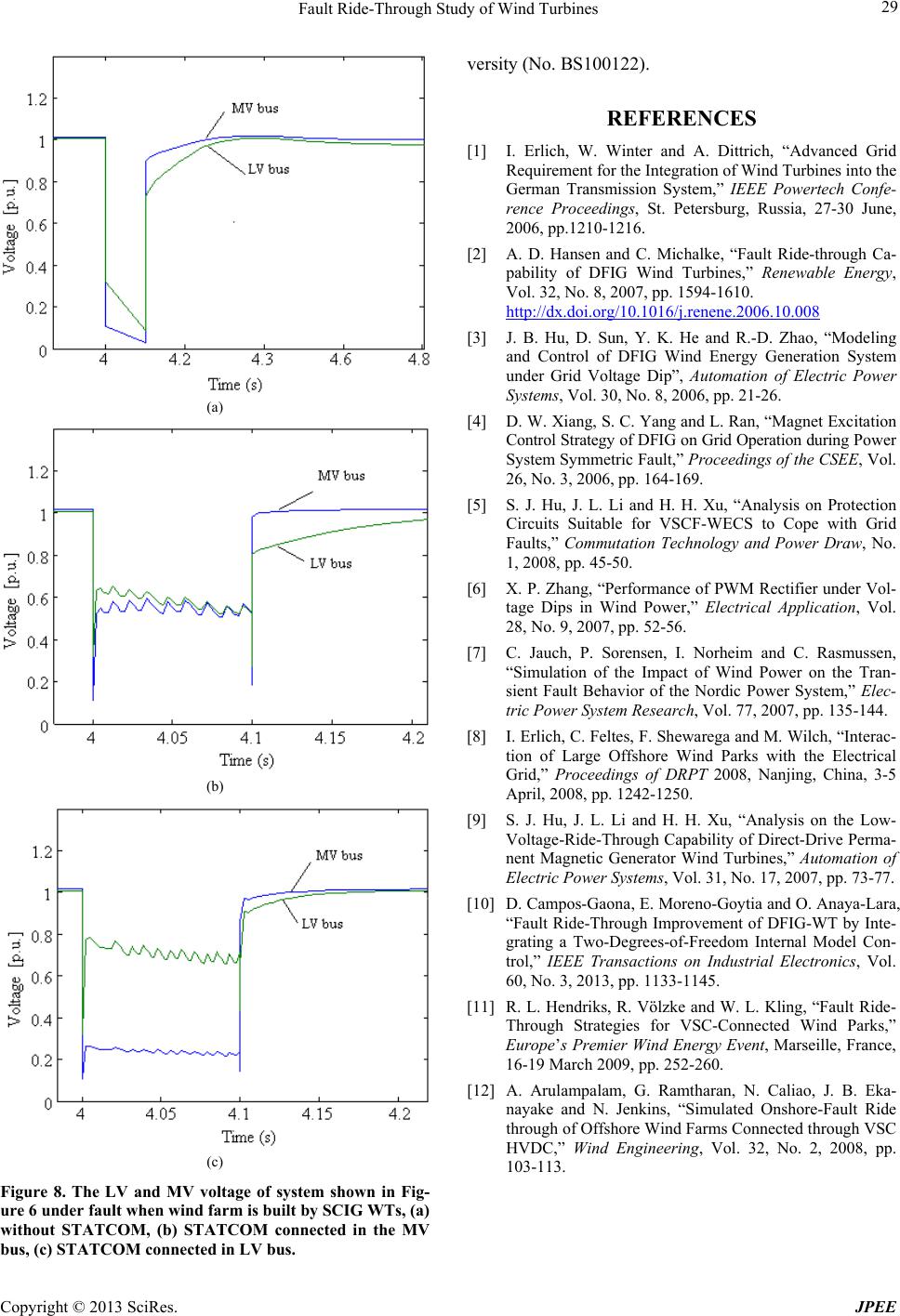
Figure 8. The LV and MV voltage of system shown in Fig-
ure 6 under fault when wind farm is built by SCIG WTs, (a)
without STATCOM, (b) STATCOM connected in the MV
bus, (c) STATCOM connected in LV bus.
versity (No. BS100122) .
REFERENCES
[1] I. Erlich, W. Winter and A. Dittrich, “Advanced Grid
Requirement for the Integration of Wind Turbines into the
German Transmission System,” IEEE Powertech Confe-
rence Proceedings, St. Petersburg, Russia, 27-30 June,
2006, pp.1210-1216.
[2] A. D. Hansen and C. Michalke, “Fault Ride-through Ca-
pability of DFIG Wind Turbines,” Renewable Energy,
Vol. 32, No. 8, 2007, pp. 1594-1610.
http://dx.doi.org/10.1016/j.renene.2006.10.008
[3] J. B. Hu, D. Sun, Y. K. He and R.-D. Zhao, “Modeling
and Control of DFIG Wind Energy Generation System
under Grid Voltage Dip”, Automation of Electric Power
Systems, Vol. 30, No. 8, 2006, pp. 21-26.
[4] D. W. Xiang, S. C. Yang and L. Ran, “Magnet Exc itation
Control Strategy of D FIG on Grid Operatio n during Power
System Symmetric Faul t,” Proceedings of the CSE E, Vol.
26, No. 3, 2006, pp. 164-169.
[5] S. J. Hu, J. L. Li and H. H. Xu, “Analysis on Protection
Circuits Suitable for VSCF-WECS to Cope with Grid
Faults,” Commutation Technology and Power Draw, No.
1, 2008, pp. 45-50.
[6] X. P. Zhang, “Performance of PWM Rectifier under Vol-
tage Dips in Wind Power,” Electrical Application, Vol.
28, No. 9, 2007, pp. 52-56.
[7] C. Jauch, P. Sorensen, I. Norheim and C. Rasmussen,
“Simulation of the Impact of Wind Power on the Tran-
sient Fault Behavior of the Nordic Power System,” Elec-
tric Power System Research, Vol. 77, 2007, pp. 135-144.
[8] I. E rlich, C. Feltes, F. Shewarega and M. Wilch, “Interac-
tion of Large Offshore Wind Parks with the Electrical
Grid,” Proceedings of DRPT 2008, Nanjing, China, 3-5
April, 2008, pp. 1242-1250.
[9] S. J. Hu, J. L. Li and H. H. Xu, “Analysis on the Low-
Voltage-Ride-Through Capability of Direct-Drive Perma-
nent Magnetic Generator Wind Turbines,” Automation of
Electric Power Systems, Vol. 31, No. 17, 2007, pp. 73-77.
[10] D. Campos-Gaona, E. Moreno-Goytia and O. Anaya-Lara,
“Fault Ride-Through Improvement of DFIG-WT by Inte-
grating a Two-Degrees-of-Freedom Internal Model Con-
trol,” IEEE Transactions on Industrial Electronics, Vol.
60, No. 3, 2013, pp. 1133-1145.
[11] R. L. Hendriks, R. Völzke and W. L. Kling, “Fault Ride-
Through Strategies for VSC-Connected Wind Parks,”
Europe’s Premier Wind Energy Event, Marseille, France,
16-19 March 2009, pp. 252-260.
[12] A. Arulampalam, G. Ramtharan, N. Caliao, J. B. Eka-
nayake and N. Jenkins, “Simulated Onshore-Fault Ride
through of Offshore Wind Farms Connected through VSC
HVDC,” Wind Engineering, Vol. 32, No. 2, 2008, pp.
103-113.



