Energy and Power Engineering, 2013, 5, 1398-1403
doi:10.4236/epe.2013.54B265 Published Online July 2013 (http://www.scirp.org/journal/epe)
Comparison among Chargers of Electric Vehicle Based on
Different Control Strategies*
Pengxin Hou, Chunlin Guo, Yubo Fan
State Key Laboratory for Alternat e El ectrical Power Sy stem with Renewable E n ergy Sources,
North China Electric Power University, Beijing, China
Email: houpengxin@163.com
Received March, 2013
ABSTRACT
The charger of electric vehicle is a power electronic device which consists of rectifying de vices and DC-DC conver ters.
This nonlinear diode rectifier circuit has low power factor and high harmonic content. In order to improve power factor
and reduce the harmonic distortion rate of the AC side current, single-phase non-controlled rectifier charger needs to
install the active power factor correction device. A piece of power system analysis software which is called PSCAD is
used in modeling of an EV charger which contains Boost-APFC. By means of simulation and analysis, differences of
APFC characteristics between the hysteresis current control mode and average current control mode which has an in-
fluence on the power grid are compared. The consequence of simulation shows that the two control strategies achieve
power factor correction and harmonic reduction requirements; Boost type power conversion circuit employs the average
current control mode is better, which has following features: relatively faster settling time of the output voltage, rela-
tively smaller overshoot, lower current harmonic distortion rate on AC side, lower switching frequency and better con-
trol effect.
Keywords: Electric Vehicle Charger; APFC; Control Strategy; Power Factor; Harmonic
1. Introduction
Environmental and energy consumption problems have
become the focus of the public throughout the world.
Electric vehicle, as a high-speed developing transport,
has an unparalleled advantage on energy conservation,
and reduction in pollutant emission. As the energy supply
facilities of Electric vehicle, charging station is the es-
sential part in the development of electric vehicle [1].
One of the main equipments of the electric vehicle is
charger that is an electrical and electronic device consisting
of rectifier, DC/DC converter and etc [2]. Due to the no-
nlinear structure of the charging system, a large number
of harmonic current components are produced that makes
harmonic noise of the circuit increase and power factor
decrease. The conventional approach is to add filters at
the input of the rectifier circuit, but the cost of the
method is so high and the volume and weight is too large
[3]. Therefore, in order to enhance the performance of
the on-board charging system, active power factor
correction (APFC) device need to be installed to improv e
the power factor of the system input side and reduce
harmonics.
Aiming at low-power single-phase uncontrolled recti-
fying charger, a simulation model of the Boost converter
circuit is builds in this thesis with the utilization of elec-
tromagnetic transient simulation tool PSCAD / EMT-DC
[4], studying two different typical strategies separately
used for controlling circuit, and making a comparative
analysis of the input voltage and current waveforms,
output voltage, AC side current harmonic distortion and
etc.
2. EV Charger Simulation Model
EV charger rectifier filter circuit is composed b y the rec-
tifier diode and the energy storage element filter capaci-
tor, and the nonlinear element leads to the conduction
angle of the rectifying element less than 180 degrees.
When the input peak voltage exceeds the voltage across
the filter capacitor, the rectifier diode has electric current
to flow through, which results in severe distortion of the
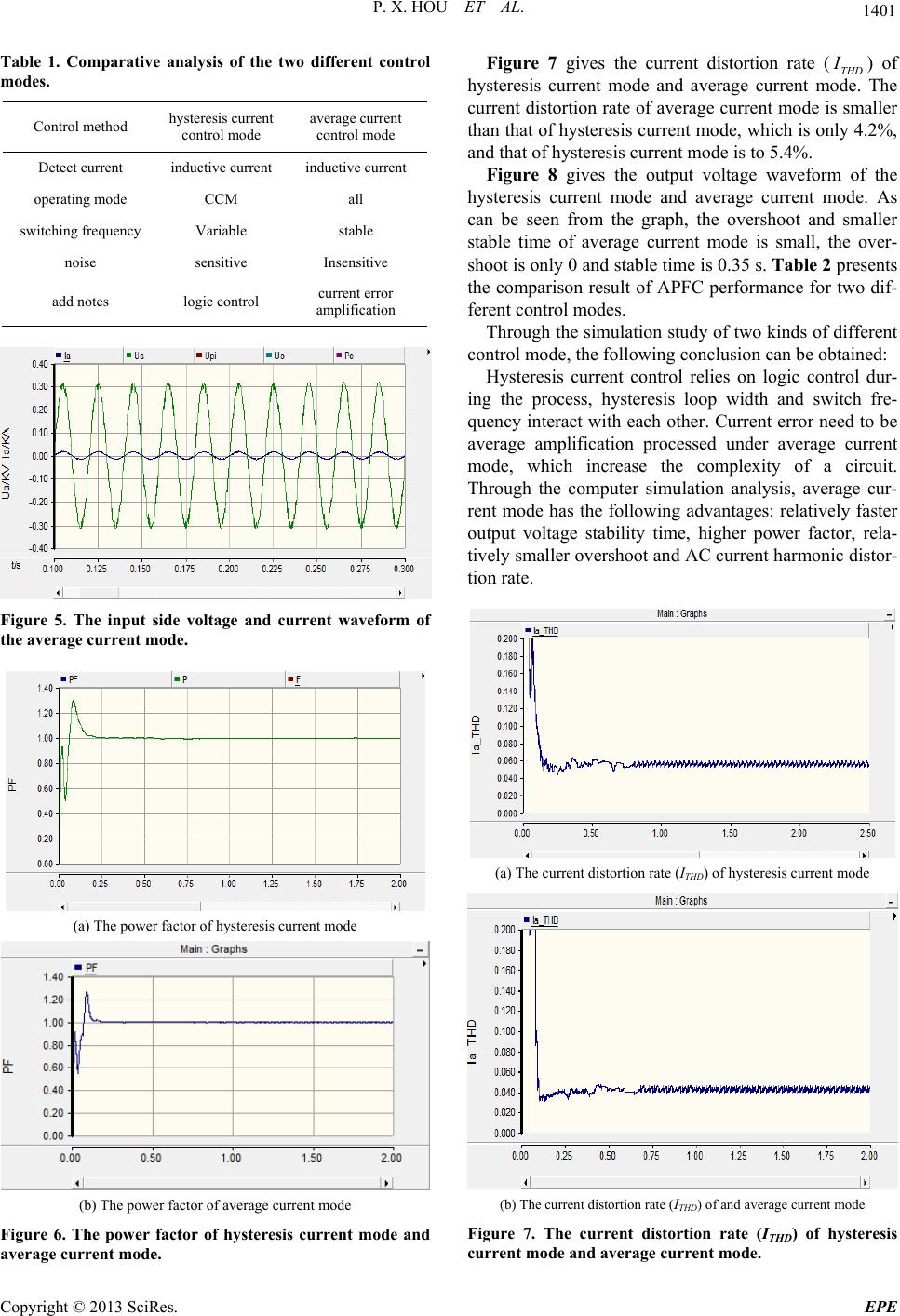
input AC current waveform [5]. Figure 1 shows an AC
side voltage and current waveforms, the green curve is
the voltage waveform, and the blue curve is the current
waveform. Current was pulse-like, which leads the input
AC voltage and current to generate the additional phase
shift. And the input side contains a lot of higher harmon-
*This work is supported by: National High Technology R&D Program
of China (863Program) (2012AA050804), Key Project of the National
Research Program of China (2011BAG02B14), National High Tech-
nology R&D Program of China (863 Program) (2011AA05A109).
Copyright © 2013 SciRes. EPE