Paper Menu >>
Journal Menu >>
 Applied Mathematics, 2011, 2, 236-240 doi:10.4236/am.2011.22026 Published Online February 2011 (http://www.SciRP.org/journal/am) Copyright © 2011 SciRes. AM Improving AOR Method for a Class of Two-by-Two Linear Systems Cuixia Li1, Shiliang Wu2 1College of Mathematics, Chengdu University of Infromation Technology, Chengdu, China 2School of Mathema tics and Statistics, Anyang Normal University, Anyang, China E-mail: lixiatk@126.com, wushiliang1999@126.com, slwu@aynu.edu.cn Received October 18, 2010; revised December 10, 2010; accepted December 15, 2010 Abstract In this paper, the preconditioned accelerated overrelaxation (AOR) method for solving a class of two-by-two linear systems is presented. A new preconditioner is proposed according to the idea of [1] by Wu and Huang. The spectral radii of the iteration matrix of the preconditioned and the original methods are compared. The comparison results show that the convergence rate of the preconditioned AOR methods is indeed better than that of the original AOR methods, whenever the original AOR methods are convergent under certain condi- tions. Finally, a numerical example is presented to confirm our results. Keywords: Preconditioner, AOR Method, Convergence, Comparison 1. Introduction Sometimes we have to solve the following linear systems , H xf (1.1) where 1 2 , IB D HCIB is non-singular with 12 ,, ,. ij ij ppnp np ij ij nppp np Bb Bb Cc Dd Systems such as (1.1) are important and appear in many different applications of scientific computing. For example, (1.1) are usually faced when the following gen- eralized linear-squares problem is considered 1 min , n T x A xbWAxb where Wis the variance-covariance matrix. One can see [2-5] for details. As is known, the linear systems (1.1) can be solved by direct methods or iterative methods. Direct methods are widely employed when the order of the coefficient ma- trix H is not too large, and are often regarded as robust methods. The memory and the computational require- ments for solving the large linear systems may seriously challenge the most efficient direct methods available to- day. The alternative is to use iterative methods establi- shed for solving the large linear systems. Naturally, it is necessary that we make the use of iterative methods in- stead of direct methods to solve the large sparse linear systems. Meanwhile, iterative methods are easier to im- plement efficiently on high performance computers than direct methods. As is known, there exist three well-known classical it- erative methods, i.e., Jacobi, Gauss-Seidel and succes- sive overrelaxation (SSOR) method, which were fully covered in the excellent books by Varge [6] and Young [7]. To make the convergence rate of SSOR method bet- ter, accelerated overrelaxation (AOR) method was pro- posed in [8] by Hadjidimos. To solve the linear systems (1.1) with the AOR itera- tive method, based on the structure of the matrix H , the matrix H is split as follows 1 2 00 . 0 0 BD HI B C (1.2) The AOR iterative method for solving (1.1) is estab- lished as follows 1 ,,0,1, ii wr xTxwgi (1.3) where 0w , ,wr T is iteration matrix and is of the fol- lowing form  C. X. LI ET AL. Copyright © 2011 SciRes. AM 237 1 1 , 2 1 12 000 10 0 1 11 wr BD I TwIw B rC IC w IwBwD wrC wrCBwIwBwrCD and 0. I g f rC I Obviously, if wr , then the AOR method reduces to the SOR method. The spectral radii of the iteration matrix is decisive for the convergence and stability of the method, and the smaller it is, the faster the method converges when the spectral radii is smaller than 1. To accelerate the conver- gence rate of the iterative method solving the linear sys- tems (1.1), preconditioned methods are often used. That is, ,PHx Pf where the preconditioner P is a non-singular matrix. If the matrix PH is expressed as 1 2 , IB D PH CIB then the preconditioned AOR method can be defined by , 1,0,1, wr ii xTxwgwi (1.4) where 1 , 12 1 11 wr w IwBwD TwrCwrCBwI wBwrCD and 0. I g Pf rC I In this paper, according to the idea of [1] by Wu and Huang, a new preconditioner is proposed to improve the convergence rate of the AOR method. Be similar to the work of [1] and [9], we compare the spectral radii of the iteration matrix of the preconditioned and the original methods. The comparison results show that the conver- gence rate of the preconditioned AOR methods is indeed superior to that of the original AOR methods, whenever the original AOR methods are convergent (to see the next section). For convenience, we shall now briefly explain some of the terminology and lemmas. Let nn ij Cc be an nn real matrix. By ,diag C we denote thenn di- agonal matix coinciding in its diagonal with . ii c For , ij A a , nn ij Bb we write A Bif ij ij ab holds for all ,1,2,,.ij n Calling A is nonnegative if 0,A 0;,1,2,,, ij aij nwe say that 0AB if and only if A B These definitions carry immedi- ately over to vectors by identifying them with 1n ma- trices. denotes the spectral radius of a matrix. Lemma 1.1 [6] Let nn A be a nonnegative and irreducible nn matrix. Then 1) A has a positive real eigenvalue equal to its spec- tral radius A ; 2) for , A there corresponds an eigenvector 0x; 3) A is a simple eigenvalue of A . 4) A increases when any entry of A increases. Lemma 1.2 [10] Let A be a nonnegative matrix. Then 1) If x Ax for some nonnegative vector , x 0x , then A . 2) If A xx for some positive vector x , then A . Moreover, if A is irreducible and if 0 x Ax x for some nonnegative vector x , then ()A and x is a positive vector. The outline of this paper is as follows. In Section 2, the spectral radii of the iteration matrix of the original and the preconditioned methods are compared. In Sec- tion 3, a numerical example is presented to illustrated our results. 2. Preconditioned AOR Methods and Comparisons Now, let us consider the preconditioned linear systems, , H xf (2.1) where H ISH and f ISf with 0. 00 S S According to [1], here S is taken as as follows 12 23 1, ,1 0 00 00 0 . 000 00 0 pp p p p b b S b b Naturally, we assume that there at least exists a non- zero number in the elements of S. By simple computations, we obtain 11 2 I BSIB ISD HCIB  C. X. LI ET AL. Copyright © 2011 SciRes. AM 238 with 11 1112 2112 22112 2 2123 312223 32223 3 1112 11211 . pp pp ppp pppp BSIB bbbbbbbb bbbbbbb bb bbb bbb bb Be similar to (1.2), H can be expressed as 11 2 00 . 00 BSIB ISD HI CB Then the preconditioned AOR method for (2.1) is de- fined as follows: 1 ,,00,1, ii wr xTxwgwi (2.2) where ,11 11 2 11 1 wr TwIwBSIBwrC wrCBSIBw ISDw I wBwrC IS D and 0. I g f rC I The following theorem is given by comparing the spectral radii of the iteration matrix ,wr T and the origi- nal iteration matrix ,wr T. Theorem 2.1 Let the coefficient matrix H be irre- ducible, 10B with 10diag B, 20B, 0C , 0D, 01w and 01r. Then 1) ,, , wr wr TT if ,1; wr T 2) ,, , wr wr TT if ,1. wr T Proof. By simple computations, we obtain 1 , 2 1 1 11 00 wr w IwBwD TwrCwI wB wr CB CD (2.3) Clearly, if the matrix H satisfies 10B, 20B, 0C and 0D with 01w and 01r, then , 1 00 0 and0. wr T CB CD Since the matrix H is irreducible, by observing the structure of (2.3), it is not difficult to get that the matrix ,wr T is irreducible. Similarly, the matrix ,wr T is non- negative and irreducible with 10diag B. By Lemma 1.1, there is a positive vector x such that ,, wr Tx x Where ,. wr T Obviously, 1 is impossible, otherwise the matrix H becomes singular. So we will mainly discuss two cases: 1 and 1 . Case 1: 1 . Since ,,, , wrwr wr Tx xTxTx we get 1 ,, 1 1 , 0 000 0 0 0 1. 0 wr wr wr wS IBwSD TxTx x wrCS IBwrCSD SwI BwD x rCS STIx rCS Sx rCS Since 0S and 0S , then we get 00 0and 0. 00 SS xx rCS rCS If 1 , then ,, 0 wr wr TxTx but not equal to zero vector. By Lemma 1.2, we get ,,wr wr TT . That is, 1) holds. Similarly, 2) holds with 1, which completes the proof. □ It is well known that when wr , AOR iteration is reduced to SOR iteration. The following corollary is eas- ily obtained. Corollary 2.1 Let the coefficient matrix H be irre- ducible, 10B with 10diag B, 20B, 0C , 0D and 01w . Then 1) , ww TT if 1; w T 2) , ww TT if 1. w T Next, we consider the following preconditioners. Let the matrix S in (2.1) be defined by 00 . 0 SS There exist the following three forms for S, that is, 1) If npp , then 11 22 ,1 , 0000 0000 . 000 npnpnp np p c c S cc 2) If npp , then 11 22 ,1 , 00 00 . 0 npnpnp np p c c S cc  C. X. LI ET AL. Copyright © 2011 SciRes. AM 239 3) If np p, then 11 22 ,1 , 00 00 . 0 00 0 ppp npp c c Scc Naturally, we assume that there at least exists a non- zero number in the elements of S. For the sake of sim- plicity, we assume that ,npp H can be expressed as 1 12 IB D HSI BC I BSD with 1 11 111211 12111 1 2122 2122 22222 2 ,1 ,2, pp pp np npnpp SI BC cbc cbccb ccbcbc cb dd d where ,1,1 11,,1 ,2,2 ,112 ,,2 ,,,11,, , , . np npnpnpnp npnpnpnpnpnp n ppn ppn ppn pnp n pp dcbcb dccbcb dccbcb The matrix H is split as follows 1 12 00 . 00 BD HI SI BCBSD Then the preconditioned AOR method for (2.1) is of the following form: 1 ,,00,1, ii wr xTxwgw i where ,1, wr TwIwJwrK 1 12 , BD JSI BC BSD 111 00 ,KSI BCI BSIBCD and 1 0. I g f rSI BCI Similarly, the following theorem and corollary are given by comparing the spectral radii of the iteration ma- trix ,wr T and the original iteration matrix ,wr T. Theorem 2.2 Let the coefficient matrix H be irre- ducible, 10Bwith 10,diag B20,B0,C 0D , 01w and 01r . Then 1) ,, , wr wr TT if ,1; wr T 2) ,, , wr wr TT if ,1. wr T Corollary 2.2 Let the coefficient matrix H be irre- ducible, 10Bwith 10,diag B20,B0,C 0D , and 01w . Then 1) , ww TT if 1; w T 2) , ww TT if 1. w T 3. A Numerical Example Now let us consider the following example to illustrate the results. Example 3.1 1 2 , IB D HCIB where 12 12 ,, ij ij ppnp np Bb Bb , ij np p Cc and ij p np Dd with 1 1 1,1,2,,, 50 11 ,, 40 40 1, ,1,2, , ii ij bi p bij ji ipjp 111 ,, 40 401 2, ,,1,2, ,1 ij bij ij i ipj p 2 2 1,1,2,,, 40 11 ,, 40 40 1, ,1,2,, ii ij bi np bij pj pi inpjnp 211 ,, 40 401 2, ,,2,,1 ij bij ij pi inpjnp 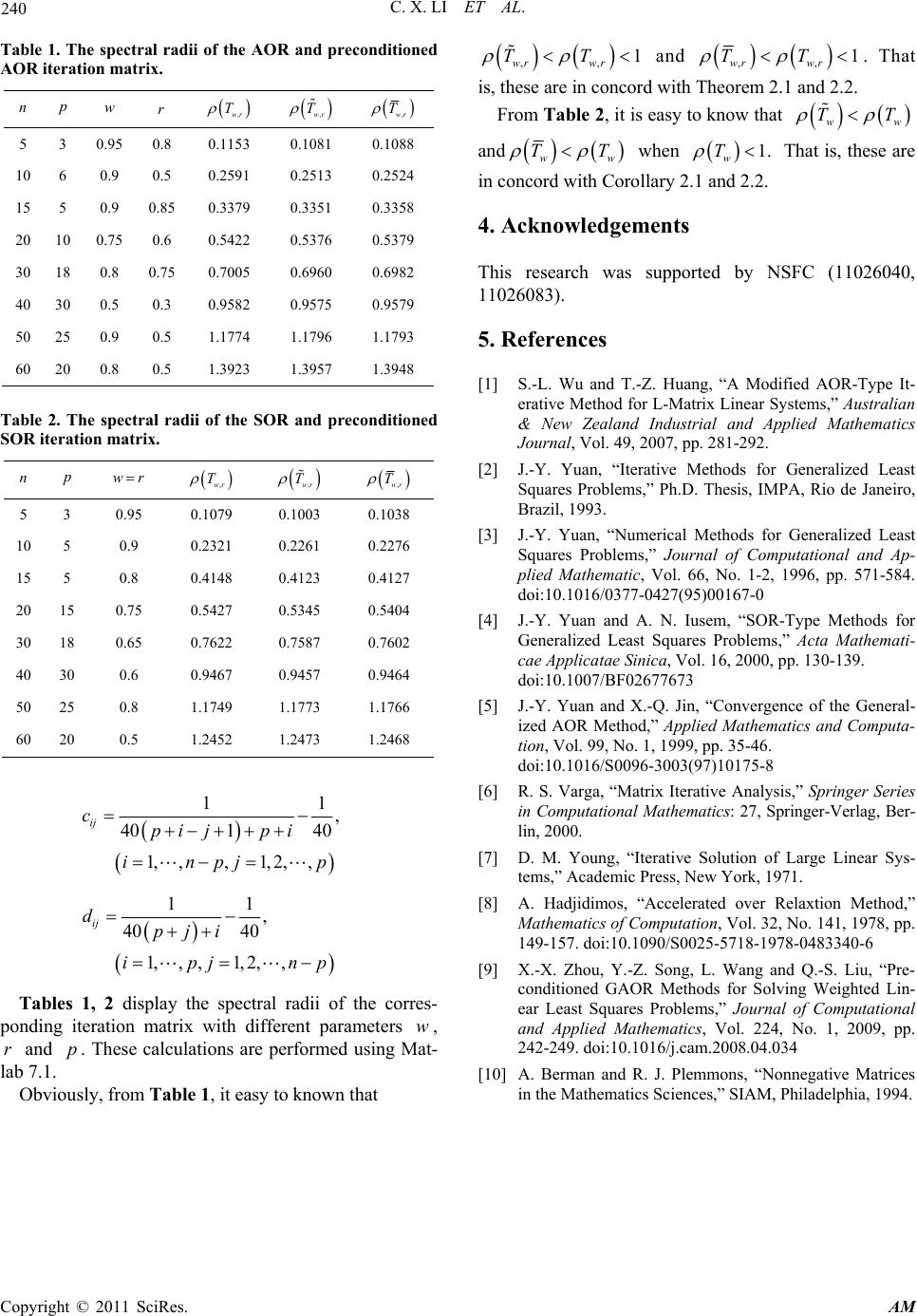 C. X. LI ET AL. Copyright © 2011 SciRes. AM 240 Table 1. The spectral radii of the AOR and preconditioned AOR iteration matrix. n p w r ,wr T ,wr T ,wr T 5 3 0.95 0.8 0.1153 0.1081 0.1088 10 6 0.9 0.5 0.2591 0.2513 0.2524 15 5 0.9 0.85 0.3379 0.3351 0.3358 20 10 0.75 0.6 0.5422 0.5376 0.5379 30 18 0.8 0.75 0.7005 0.6960 0.6982 40 30 0.5 0.3 0.9582 0.9575 0.9579 50 25 0.9 0.5 1.1774 1.1796 1.1793 60 20 0.8 0.5 1.3923 1.3957 1.3948 Table 2. The spectral radii of the SOR and preconditioned SOR iteration matrix. n p wr ,wr T ,wr T ,wr T 5 3 0.95 0.1079 0.1003 0.1038 10 5 0.9 0.2321 0.2261 0.2276 15 5 0.8 0.4148 0.4123 0.4127 20 15 0.75 0.5427 0.5345 0.5404 30 18 0.65 0.7622 0.7587 0.7602 40 30 0.6 0.9467 0.9457 0.9464 50 25 0.8 1.1749 1.1773 1.1766 60 20 0.5 1.2452 1.2473 1.2468 11 , 401 40 1, ,,1,2,, ij cpi jpi inpj p 11 , 40 40 1, ,,1,2, , ij dpj i ipj np Tables 1, 2 display the spectral radii of the corres- ponding iteration matrix with different parameters w, r and p. These calculations are performed using Mat- lab 7.1. Obviously, from Table 1, it easy to known that ,, 1 wr wr TT and ,, 1 wr wr TT . That is, these are in concord with Theorem 2.1 and 2.2. From Table 2, it is easy to know that ww TT and ww TT when 1. w T That is, these are in concord with Corollary 2.1 and 2.2. 4. Acknowledgements This research was supported by NSFC (11026040, 11026083). 5. References [1] S.-L. Wu and T.-Z. Huang, “A Modified AOR-Type It- erative Method for L-Matrix Linear Systems,” Australian & New Zealand Industrial and Applied Mathematics Journal, Vol. 49, 2007, pp. 281-292. [2] J.-Y. Yuan, “Iterative Methods for Generalized Least Squares Problems,” Ph.D. Thesis, IMPA, Rio de Janeiro, Brazil, 1993. [3] J.-Y. Yuan, “Numerical Methods for Generalized Least Squares Problems,” Journal of Computational and Ap- plied Mathematic, Vol. 66, No. 1-2, 1996, pp. 571-584. doi:10.1016/0377-0427(95)00167-0 [4] J.-Y. Yuan and A. N. Iusem, “SOR-Type Methods for Generalized Least Squares Problems,” Acta Mathemati- cae Applicatae Sinica, Vol. 16, 2000, pp. 130-139. doi:10.1007/BF02677673 [5] J.-Y. Yuan and X.-Q. Jin, “Convergence of the General- ized AOR Method,” Applied Mathematics and Computa- tion, Vol. 99, No. 1, 1999, pp. 35-46. doi:10.1016/S0096-3003(97)10175-8 [6] R. S. Varga, “Matrix Iterative Analysis,” Springer Series in Computational Mathematics: 27, Springer-Verlag, Ber- lin, 2000. [7] D. M. Young, “Iterative Solution of Large Linear Sys- tems,” Academic Press, New York, 1971. [8] A. Hadjidimos, “Accelerated over Relaxtion Method,” Mathematics of Computation, Vol. 32, No. 141, 1978, pp. 149-157. doi:10.1090/S0025-5718-1978-0483340-6 [9] X.-X. Zhou, Y.-Z. Song, L. Wang and Q.-S. Liu, “Pre- conditioned GAOR Methods for Solving Weighted Lin- ear Least Squares Problems,” Journal of Computational and Applied Mathematics, Vol. 224, No. 1, 2009, pp. 242-249. doi:10.1016/j.cam.2008.04.034 [10] A. Berman and R. J. Plemmons, “Nonnegative Matrices in the Mathematics Sciences,” SIAM, Philadelphia, 1994. |