Energy and Power Engineering, 2013, 5, 1352-1356
doi:10.4236/epe.2013.54B256 Published Online July 2013 (http://www.scirp.org/journal/epe)
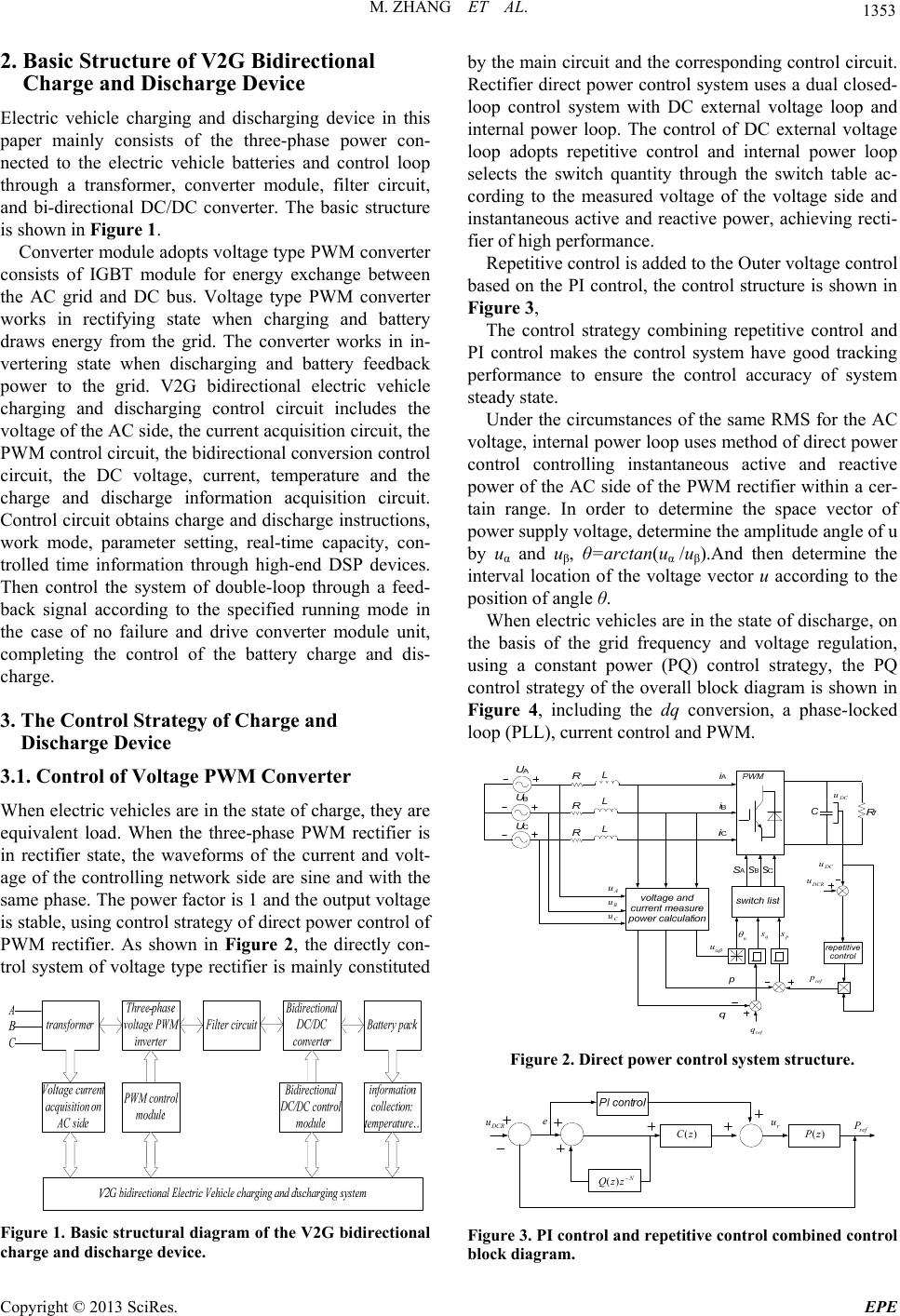
Research on V2G Control Strategy for EV Charge and
Discharge Equipment
Mai Zhang, Caihong Zhao, Xiaobo Tang, Li Liu, Lijuan Tan
School of Electrical and Automation Engineering, Nanjing Normal University, Nanjing, China
Email: zhangmai1988@126.com, 61081@njnu.edu.cn, xiaobotang@126.com
Received March, 2013
ABSTRACT
In this paper, the fundamental structure of charge and discharge device of V2G is analyzed. As for three phase voltage
source PWM converter’s control, this paper presents that the control strategy of direct power control PWM rectifier is
adopted under charging operation and constant power control strategy is used under discharging operation. For bidirec-
tional DC/DC converter control strategy, dual closed-loop control of external voltage loop and internal current loop is
put into use. The whole system of charge and discharge device of V2G is modeled and simulated by using the toolbox
of PSCAD/EMTDC. Two-way power energy and information interaction of electric vehicle and power grid has been
realized, current harmonic on grid side is decreased, power factor and power quality are improved.
Keywords: V2G; PWM; Direct Power Control; Constant Power Control; DC/DC Converter
1. Introduction
In recent years, the state has vigorously developed smart
grid technology [1], Electric vehicles (Electric Vehicle,
EV) technology has gained rapid development in China
[2]. With the improvement of battery technology and the
charge-discharge cycle life, power battery in the Electric
vehicles can be used as a distributed energy storage unit.
Electric vehicles are not only as a power system load
power consumption but also energy stored in vehicles
can be given when the power grid needs, which is V2G
technology two-way interaction of electric vehicles and
smart grid[3-4]. The essence of V2G technology is on the
basis of the full information interaction for electric vehi-
cles and the power grid, which realizes the two-way flow
of energy between the vehicles and the power grid. Ac-
cording to the charging and discharging strategy, meet
the needs of the premise of the electric vehicle users
traveling, remaining energy participates in load regula-
tion, including grid peak-to-valley regulation, standby
power, frequency response, and promote the application
of renewable energy access and so on, which can bring in
revenue for the grid and electric vehicles users. V2G
technology implementation will facilitate a truly seam-
less integration of electric vehicles and smart grid.
The most widely used electric vehicle battery charge
and discharge technology in China currently is non-con-
trolled rectifier and DC/DC chopper. This technology has
advantages of good dynamic performance, smaller input
ripple on DC side, but there are shortcomings as the high
harmonic content on the system side, large size, low
power factor and pollution on the grid [5,6]. With the
development of power electronics technology, the system
of the charging and discharging of the DC/DC converter
technology has been gradually promoted. The system
consists of an isolated DC/DC converter and buck chop-
per. The drawback is that only the resistance is dis-
charged in the discharge of the battery, energy cannot
give back to the power grid, resulting in wasting a lot of
energy. This paper uses the three-phase PWM converter
and bi-directional DC/DC converter to constitute the
V2G two-way charging and discharging device of the
electric vehicle. The three-phase voltage-type PWM
converter uses the control strategy of direct power con-
trol of PWM rectifier under charging operation and
control strategy of constant power under discharging
operation. For bidirectional DC/DC converter control
strategy, dual closed-loop control of external voltage
loop and internal current loop is put into use. V2G charge
and discharge device using the above control strategies
has the follow benefits: Reducing the current harmonics
of the grid-side in the charging process, improving the
power factor and increasing the working frequency. The
electric vehicles as an energy storage system can also
make the energy feedback to the grid, so the energy uti-
lization can be further raised, achieving the bi-direc-
tional flow of energy [7-9].
*Project supported by the Nature Science Foundation of the Jiangsu
Higher Education Institutions of China (Grant No.2010111Tsj0113)
Copyright © 2013 SciRes. EPE