Energy and Power Engineering, 2013, 5, 1187-1191
doi:10.4236/epe.2013.54B225 Published Online July 2013 (http://www.scirp.org/journal/epe)
Coordinated Control of Multi-FACTS to Enhance the
Dynamic Stability of the Power System
Rui Min1, Fei Xu1, Fei Yuan2, Zonghe Gao2
1Department of Electrica l Engineer ing, Tsinghua University, Bei Jing, China
2NARI Technology Development Co., Ltd, Nanjing, China
Received February, 2013
ABSTRACT
This article introduces a FACTS coordinated control strategy with impedance/admittance measurement feedb ack. Then
the effectiveness of this method is proved in mathematics with damp torque method. The control strategy effect is veri-
fied in a single machine infinite bus system and a four machine power system with PSASP6.26 (Power System Analysis
Software Package). This coordinated control strategy has practical significance to improve system dynamic stability a n d
theoretical significance to improve system transient stability.
Keywords: Coordinated Control; Dynamic Stability; Measurement Feedback; SVC; TCSC; Transient Stability
1. Introduction
The power grid of China has entered the ultra-high volt-
age (UHV) period with large complicated power system.
A large power grid needs more people to supervise and
has more equipment to control because of its complicated
structure. In addition , although the development of smart
grid brings many opportunities to us, operators have
more and more challenges to run the grid and avoid ac-
cidents. In this context, our smart grid needs more flexi-
ble and reliable control methods to reduce network losses,
improve the f low distribution, improve the system stabil-
ity, raise the level of power system damping and so on.
FACTS device can be regulated reliable with fast re-
sponse. Individual FACTS device can improve the local
power grid status with appropriate control strategies in a
short period of time. If multiple FACTS devices in dif-
ferent areas can be coordinated with appropriate control
strategies, the entire grid (or parts of) will have a better
control results. With the widely application of FACTS
devices, the coordination control problem of FACTS
devices has an increasingly importan t position [1].
2. FACTS Coordinated Control Strategy
with Measurement Feedback
2.1. Coordinated Control of TCSC with SVC
Admittance Inputs Signal
The TCSC input control signal is determin ed by the con-
trol strategy, such as the acceleration power of the gen-
erator and active and reactive power flow of transmission
lines. The most commonly scene to use TCSC is to con-
trol the electromagnetic power of the series branch,
which use electromagnetic power deviation as inputs.
The PI controller parameters and control effect are con-
strained by TCSC capacity. When TCSC use conven-
tional PI control, the system dynamic stability can be
improved more [2].
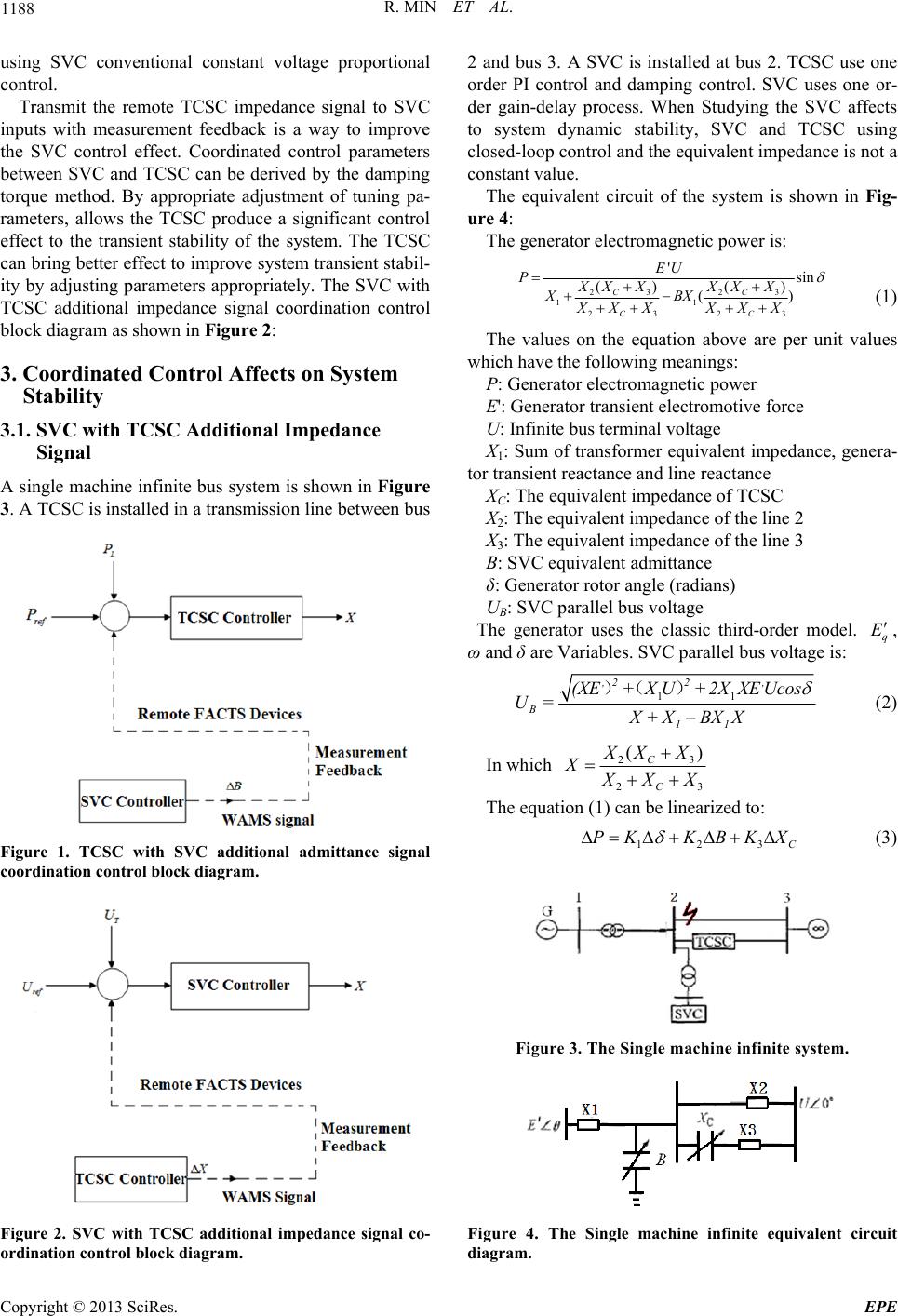
Transmit the remote SVC admittance signal to TCSC
inputs with measurement feedback is a way to improve
the TCSC control effect. Coordinated control parameters
between TCSC and SVC can be derived by the damping
torque method. By appropriate adjustment of tuning pa-
rameters, allows the SVC produce a significant control
effect to the dynamic stability of the system. The SVC
can bring better effect to improve system dynamic stabil-
ity by adjusting parameters appropriately. The TCSC
with SVC additional ad mittance signal co ordination con-
trol block diagram as shown in Figure 1:
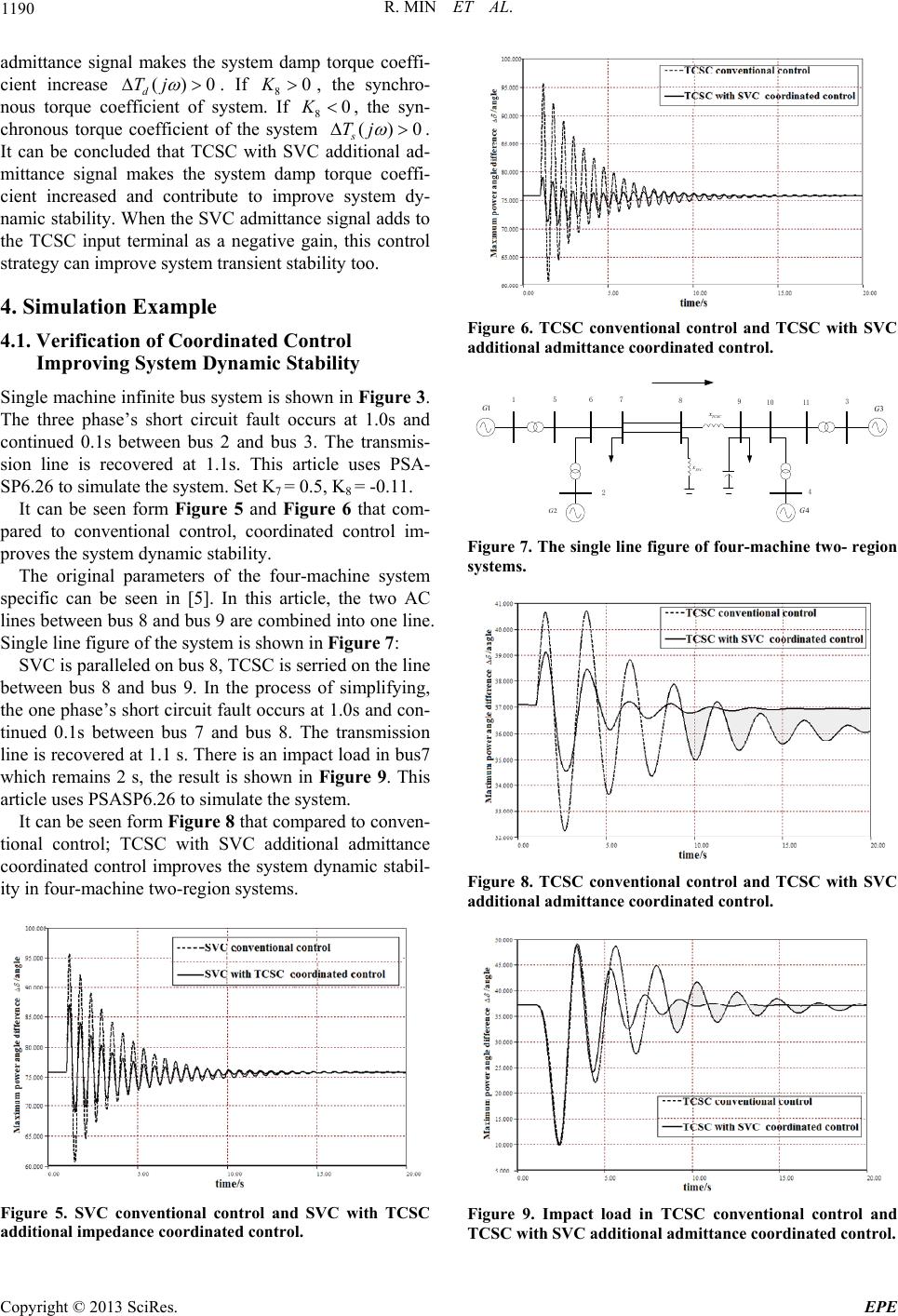
2.2. Coordinated Control of SVC with TCSC
Impedance Inputs Signal
The most commonly scene to use SVC is to maintain the
stability of the syste m voltage. In addition, SVC can also
be used to improve the dynamic and static stability per-
formance of the power system and to improve grid dy-
namic stability and damping.
It is difficult to improve the system dynamic stability
and maintain voltage stability by one SVC at the same
time. If the SVC control strategy is to improve the dy-
namic stability of the system, it may have a negative im-
pact on system voltage stability. The system transient
stability should have a more significant improvement by
Copyright © 2013 SciRes. EPE