Energy and Power Engineering, 2013, 5, 999-1004
doi:10.4236/epe.2013.54B191 Published Online July 2013 (http://www.scirp.org/journal/epe)
Accuracy Improvement in CCT Estimation of Power
Systems by iRprop-RAN Hybrid Neural Network
Teruhisa Kumano, Shinjiro Netsu
Department of Electronics and Bioinformatics, Meiji University, Kawasaki, Japan
Email: kumano@isc.meiji.ac.jp
Received March, 2013
ABSTRACT
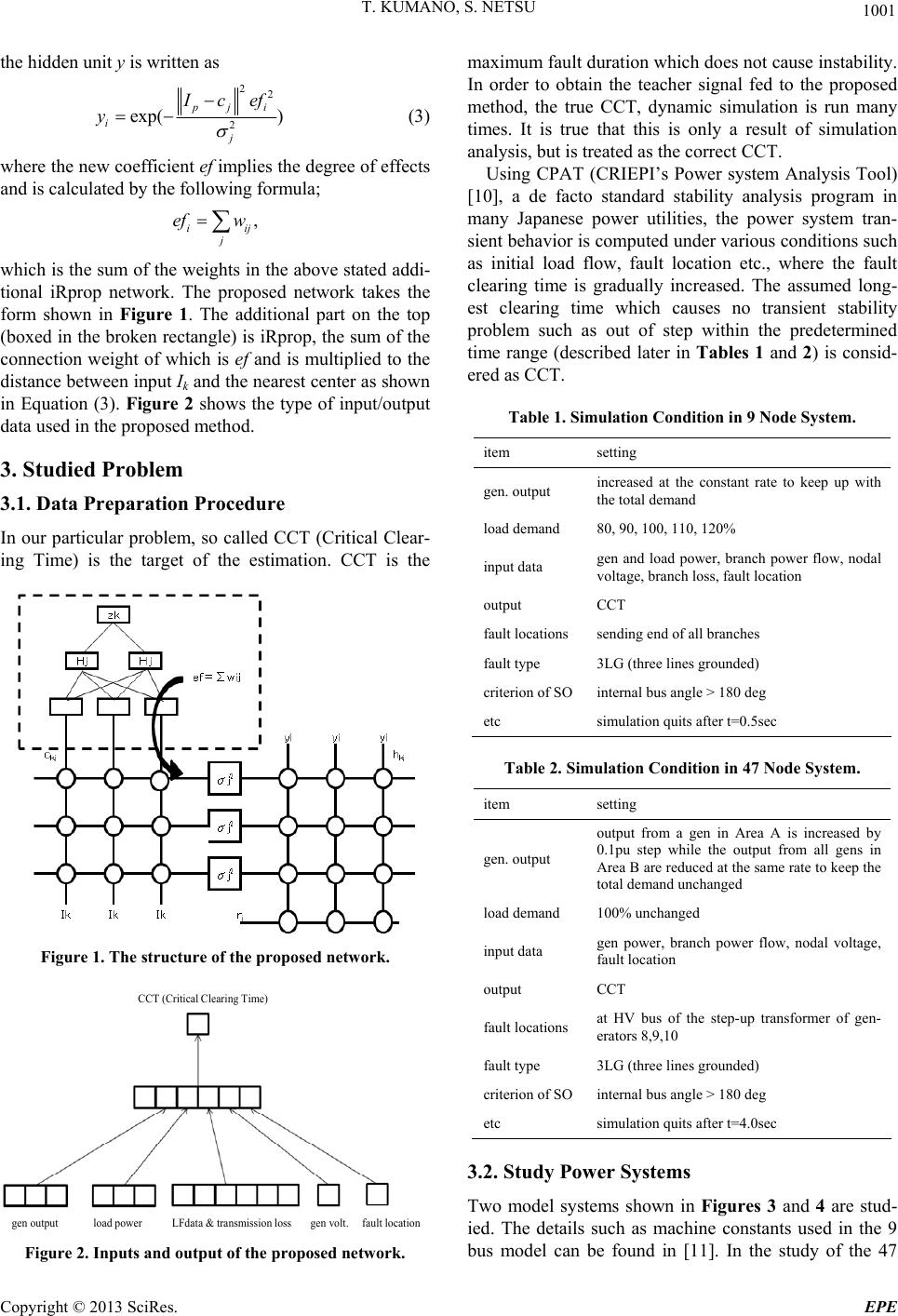
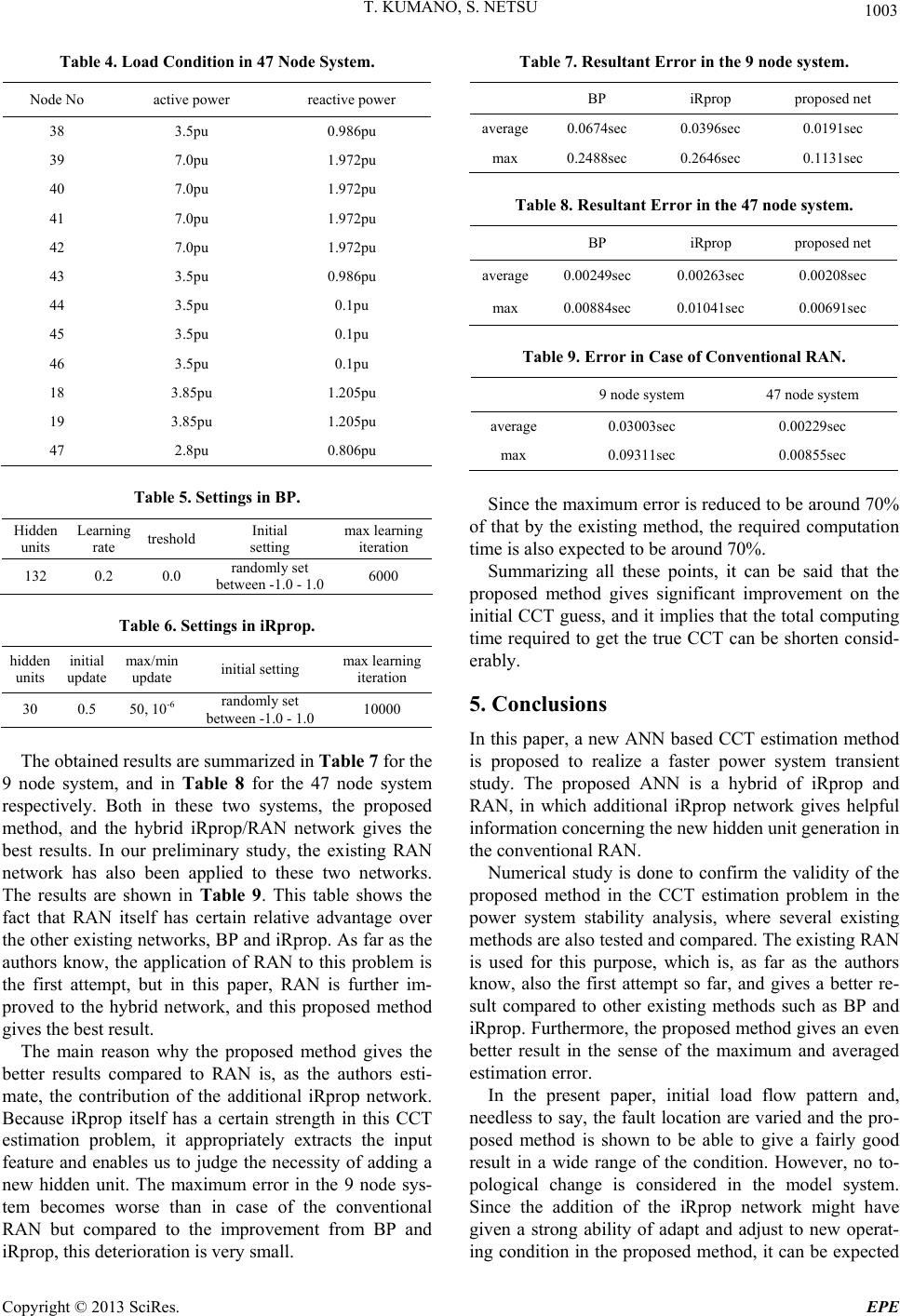
This paper proposes a new Initial CCT (Critical Clearing Time) estimation method using a hybrid neural network com-
posed of iRprop (Improving the Resilient back PROPation Algorithm) and RAN (Resource Allocation Network). In
transient stability study, CCT evaluation is very important bu t time consuming due to the fact it needs many iteration of
time domain simulations gradu ally increasing the fault clearing time. The key to reduce th e required computing time in
this process is to find accurate initial estimation of CCT by a certain handy method before going to the iterative stage.
As one of the strongest candidates of this handy method is the utilization of the pattern recognition ability of neural
networks, which enable us to jump to a close estimation of the real CCT without any heavy computing burden. This
paper proposes a new hybrid neural network which is a combination of the well-known iRprop and RAN. In the pro-
posed method, the outputs of the hidden units of RAN are modified by multiplying the contribution factors calculated
by an additional iRprop network. Numerical studies are done using two different test systems for the purpose of con-
firming the validity of the proposal. The result of the proposed method is the best. Properly evaluating the contribution
of each input to the hidden units, the estimation error obtained by the proposed method is improved further than the
original RAN based estimation.
Keywords: Critical Clearing Time; Estimation; Power System; iRprop; Resource Allocation Network
1. Introduction
In large power systems operation, stability check in the
contingency analysis is always important. In particular,
in these two years, we, Japanese electric power engineers,
cannot depend upon the strong power supply from the
nuclear power plants and the basic power flow pattern is
different from the original schedule. It implies that every
daily grid operation needs more careful study, in which
stability check should be done. The long and narrow
power corridor is, in a sense, inevitable due to the geo-
graphical restriction of our country, which makes the
stability the main restricting factor for the long and heavy
power transmission.
One of the biggest problems in the transient stability
constrained contingency analysis is the long computing
time required. Transient stability study itself is a typical
time consuming calculation. Here, we need to iterate
dynamic simulation many times gradually increasing
power flow or fault clearing time to reach their critical
value. Comparing these two, the critical clearing time
(CCT) is easy to calculate and is often used. For the fast
evaluation of CCT, we need accurate initial guess of the
clearing time. If we can start from close guess, the re-
quired time to get the true CCT can be shorter. Since the
power flow pattern in the whole system gives a substan-
tial effects on the resultant CCT, it can be expected that
we can accurately estimate CCT if the important vari-
ables such as the specified values of the active and reac-
tive power at each node is given.
Many methods based on so called artificial neural
network (ANN) techniques have been studied for this
initial guess. Ikenono et al proposed to use BP (back
propagation) based ANN [1]. Bettiol et al proposed to
use RBF (Radial Basis Function) network for this pur-
pose [2]. The authors ourselves studied this problem and
proposed to use support vector machine [3] and rele-
vance vector machine [4]. Once properly trained, ANN
can recognize the given input pattern and make classifi-
cation or give a regression in a short computing time.
Because of its nonlinear knowledge representation ability,
it has been a strong candidate for this initial estimator.
However, even after the above mentioned research ef-
forts, it still remains as a research theme and not a real
field application.
In this paper, a new ANN method is proposed for the
above stated purpose. In this proposal so called RAN
(Resource Allocation Network) is coupled with iRprop
(Improving the Rprop Learning Algorithm, in which
Copyright © 2013 SciRes. EPE