 Energy and Power Engineering, 2013, 5, 962-969 doi:10.4236/epe.2013.54B185 Published Online July 2013 (http://www.scirp.org/journal/epe) Distributed Adaptive Learning Framework for Wide Area Monitoring of Power Systems Integrated with Distributed Generations Kang Li1,2, Yuanjun Guo1, David Laverty1, Haibo He3, Minrui Fei2,4 1School of Ele ctronics, E lectrical Engineering and Computer Science, Queens University Belfast, Belfast, UK 2UK-China Science Bridge Joint Laboratory on Energy and Automation, Shanghai University, China and Queens University Belfast, UK 3Department of Electrical, Computer, and Biomedical Engineering University of Rhode Island, USA 4School of Mechatronics and Automation Shanghai Uni-versity, China Email: k.li, yguo01@qub.ac.uk, david.laverty@qub.ac.uk, he@ele.uri.edu, mrfei@staff.shu.edu.cn Received April, 2013 ABSTRACT This paper presents a preliminary study of developing a novel distributed adaptive real-time learning framework for wide area monitoring of power systems integrated with distributed generations using synchrophasor technology. The framework comprises distributed agents (synchrophasors) for autonomous local condition monitoring and fault detec- tion, and a central unit for generating global view for situation awareness and decision making. Key technologies that can be integrated into this hierarchical distributed learning scheme are discussed to enable real-time information extrac- tion and knowledge discovery for decision making, without explicitly accumulating and storing all raw data by the cen- tral unit. Based on this, the configuration of a wide area monitoring system of power systems using synchrophasor technology, and the fun ctionalities for locally installed open-phasor-measurement-units (OpenPMUs) an d a central unit are presented. Initial results on anti-islanding protection using the proposed approach are given to illustrate the effec- tiveness. Keywords: Smart Grid; Anti-islanding Protection; Distributed Agents; Incremental Learning; Monitoring and Control 1. Introduction We first consider a generic scenario where a distributed adaptive real-time learning system is often placed within a data intensive environment and actively interacts with it [1-3]. The application environment may be structured such as monitoring and control of large-scale power sys- tems or unstructured where the objects to be monitored and operated are dynamic and uncertain, such as moni- toring and contingency control of large scale renewable generations [4]. Figure 1 illustrates such a generic sce- nario for smart grid monitoring, operation and control. For such applications, a large amount of spatial-tem- poral and often heterogeneous data is acquired and proc- essed through a distributed network of static and mobile data acquisition nod es/agents. A learning system is put in place to adaptively learn and accumulate meaningful information and knowledge to generate a global model for situational awareness and to make decisions to be implemented by a distributed network of actuators. Each node in the distributed sensor and actuator networks possesses some computation power to either pre-process local and temporal data or to locally implement the deci- sions from the core or central unit through task decom- position and coordination among the nodes. In addition to communication with the core, the nodes may commu- nicate with each other or a node may communicate with other nod es of close proxi mity. Among various issues to be addressed for such com- plex systems, we mainly consider the data fusion to sup- port overall system operation and control. The core aim is to build a dynamic, global, and abstract model, based on which consequences are inferred and decisions are made. However, the major challenge is th at data obtained Figure 1. A generic scenario in smart grid applications. Copyright © 2013 SciRes. EPE 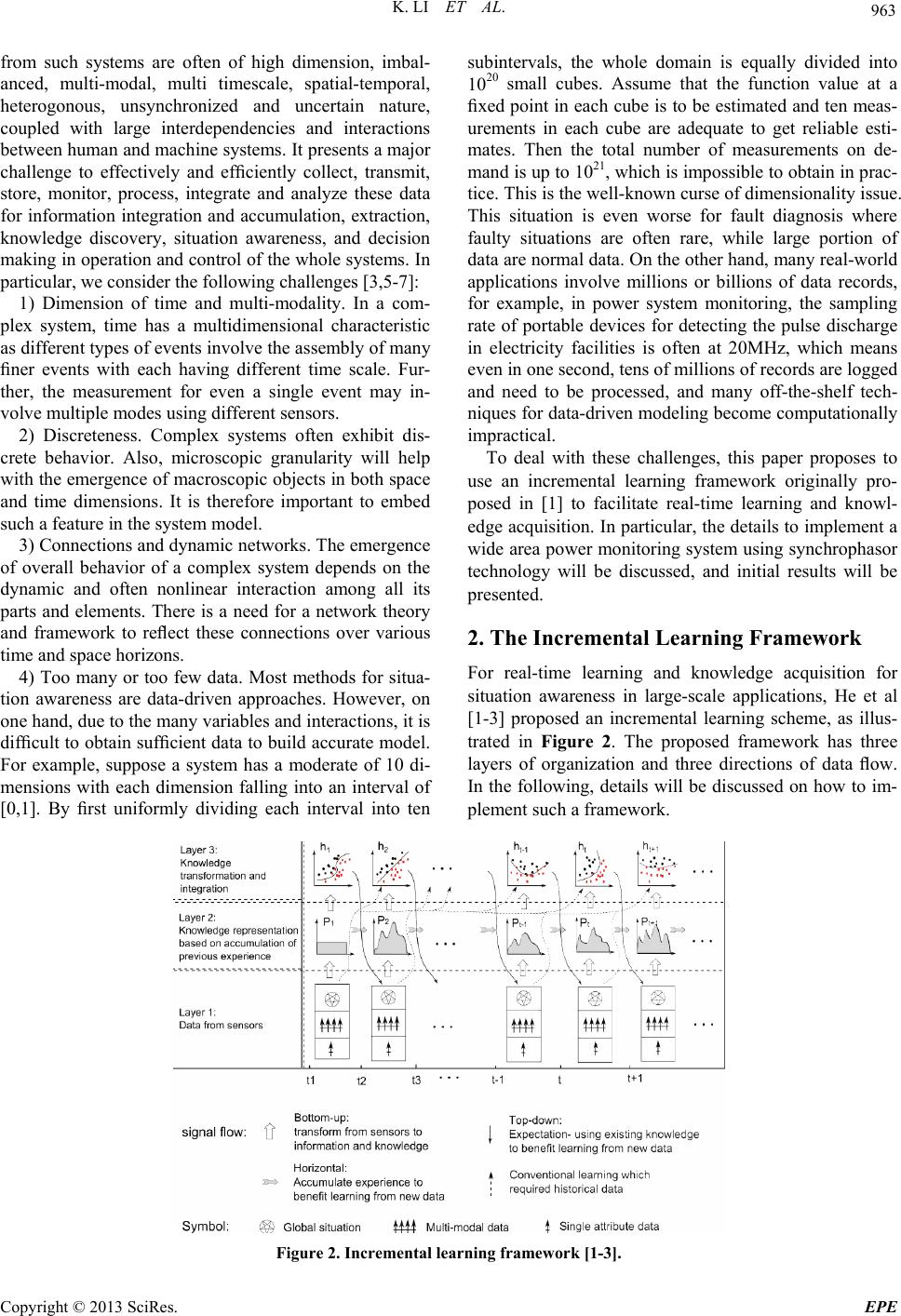 K. LI ET AL. 963 from such systems are often of high dimension, imbal- anced, multi-modal, multi timescale, spatial-temporal, heterogonous, unsynchronized and uncertain nature, coupled with large interdependencies and interactions between human and machine systems. It presents a major challenge to effectively and efficiently collect, transmit, store, monitor, process, integrate and analyze these data for information integration and accumulation, extraction, knowledge discovery, situation awareness, and decision making in operation and control of the whole systems. In particular, we consider the following challenges [3,5-7]: 1) Dimension of time and multi-modality. In a com- plex system, time has a multidimensional characteristic as different types of events involve the assembly of many finer events with each having different time scale. Fur- ther, the measurement for even a single event may in- volve multiple modes using different sensors. 2) Discreteness. Complex systems often exhibit dis- crete behavior. Also, microscopic granularity will help with the emergence of macroscopic objects in both space and time dimensions. It is therefore important to embed such a feature in the system model. 3) Connections and dynamic networks. The emergence of overall behavior of a complex system depends on the dynamic and often nonlinear interaction among all its parts and elements. There is a need for a network theory and framework to reflect these connections over various time and space horizons. 4) Too many or too few data. Most methods for situa- tion awareness are data-driven approaches. However, on one hand, due to the many variables and interactions, it is difficult to obtain sufficient data to bu ild accurate model. For example, suppose a system has a moderate of 10 di- mensions with each dimension falling into an interval of [0,1]. By first uniformly dividing each interval into ten subintervals, the whole domain is equally divided into 1020 small cubes. Assume that the function value at a fixed point in each cube is to be estimated and ten meas- urements in each cube are adequate to get reliable esti- mates. Then the total number of measurements on de- mand is up to 1021, which is impossible to obtain in prac- tice. This is the well-known curse of dimensionality issu e. This situation is even worse for fault diagnosis where faulty situations are often rare, while large portion of data are normal data. On the other hand, many real-world applications involve millions or billions of data records, for example, in power system monitoring, the sampling rate of portable devices for detecting the pulse discharge in electricity facilities is often at 20MHz, which means even in one second, tens of millions of records are logged and need to be processed, and many off-the-shelf tech- niques for data-driven modeling become computationally impractical. To deal with these challenges, this paper proposes to use an incremental learning framework originally pro- posed in [1] to facilitate real-time learning and knowl- edge acquisition. In particular, th e details to implement a wide area power monitoring system using synchrophasor technology will be discussed, and initial results will be presented. 2. The Incremental Learning Framework For real-time learning and knowledge acquisition for situation awareness in large-scale applications, He et al [1-3] proposed an incremental learning scheme, as illus- trated in Figure 2. The proposed framework has three layers of organization and three directions of data flow. In the following, details will be discussed on how to im- plement such a framework. Figure 2. Incremental learning framework [1-3]. Copyright © 2013 SciRes. EPE  K. LI ET AL. 964 Layer 1: Global situation generation using streams of processed data transmitted from the distributed sensing network with locally featured information. This layer integrates all data streams from the distrib- uted sensing network and generates a global view of the situation using data fusion techniques, such as grid based models, distributed probability network, and Bayesian filtering technologies, etc. to deal with the integration of spatial-temporal multi-modal d ata. It should b e noted that the streams of data transmitted from different sensors or local agents are often processed data by local sensor nodes which often have some limited computation capacity. To avoid heavy transmission traffic (often through wireless and wired networks) and also to deal with data imbalance, the data transmitted to the second layer are often down sampled with larger time scale or are only small segment of data of interest, while local computing facilities (e.g. embedded systems) perform real-time ini- tial data processing using e.g. filters or de-noising tech- niques, and data analysis using e.g. fast classification and fault diagnosis techniques to extract useful data segments or features. This helps to reduce the amount of data transmitted to the upper layer and thus enables more ef- fective and efficient data fusion. Further, in this layer, particular attentions should also be paid to the consis- tence and completeness of the model to represent the global situation. Layer 2: Knowledge extraction and representation based on the accumulation of previous experience. This layer extracts patterns of attributes from the global view generated from layer 1 and builds a global knowl- edge base from the previous experience. The knowledge representation in this layer depends on the specific ap- plication, and they can be in the form of distribution functions, fuzzy rules, statistic or deterministic global models of the occurrence of certain situations or faults, or other forms that can effectively represent high- level of knowledge accumulated from previous experience. Layer 3: Multiple hypotheses development by effec- tive weight adjustments in the incremental learning life. This layered learning architecture enables consideration of all previous domain data and accumulates knowledge from layer 2 to any future time instance without explicit access to pr e v iously o bserved raw data. In the following, details will be presented on how to implement the scheme in building a wide-area monitor- ing system for smart grid integrated with distributed ge- nerators, often from renewables, using synchrophasor technologies. 3. Automatic Anti-islanding Detection Using Synchrophasors To address the twin challenges of tackling climate change and maintaining energy security, many countries are committed to decarbonize their energy systems. As a result, the renewable energy solution becomes an in- creasingly attractive and important topic, and it contrib- utes to the sustainable development of the society. The development of hybrid power systems incorporating re- newable sources represents a big step towards distributed generation (DG) and smart grid [8]. Distributed genera- tion concerns the generation and interconnection of elec- tricity from many small-scale and geographically distrib- uted energy sources to the main power utility. The en- ergy sources include renewables such as wind, tidal and wave, solar PV, and bio-fuels, etc, but also traditional ones like diesel generators. Today, some networks fre- quently operate with greater than 10% of their power supplied by distributed generation, and Ireland has at times operated with over 40 % of generation supplied by wind energy [9]. High penetration of distributed genera- tions has placed considerable impact on the power sys- tem planning, scheduling, operation, control, protection, and maintenance. Of particular interest here is the islanding situation where a distributed generator is sup- plying power to a location without power from the utility being present. Islanding can occur intentionally, bu t also unintention- ally, for the latter case, this is often caused by an unex- pected interruption to the utility supply in a region where an embedded generator is operating in parallel to the u til- ity grid. Islanding may pose a risk of damaging utility plant and customer connected equipment, and it also presents a danger to utility personnel working to restore the utility supply and to the public as the utility is no longer in control of power quality and earth ing. For these reasons, islanded operation while connected to th e utility network is generally forbidden. Methods of preventing islanding are known as anti-islanding detection, and it has become the most challenging and important aspect in designing the electrical power system with cogenera- tions. An important technique in anti-islanding detection is to reliably detect the power islanding condition, and the two most common methods are Rate-of-Change -of- Frequency (ROCOF) and Vector Shift which rely on a power imbalance to detect islanding [8,10,11]. These techniques can fail when the power imbalance may not be large enough to activate the protection to trip the in- ter-tie break to disconn ect the power island from the util- ity, or an event may occur across the grid which is how- ever misjudged by ROCOF or Vector Shift relay as an islanding event, leading to the nuisance tripping which can further cause cascade tripping, causing significant economic and social loss. Therefore, to improve the reli- able islanding condition detection has become an impor- tant research topic. Copyright © 2013 SciRes. EPE  K. LI ET AL. 965 3.1. Introduction to Automatic Anti-islanding Detection Using Synchrophasors Wide-area Synchrophasor technology provides the anti- islanding detector at distributed generators with real-time information, delivered using secure Internet Protocol technologies, so that nuisance trip s may be avoided, sen- sitivity is improved and cascade tripping can be pre- vented [10-1 2]. In general, the pure sinusoidal waveform is commonly represented as a phasor /2 j ri m YYY Ae . According to IEEE Standard C37.118.1-2011, this basic concept is adapted as the representation of AC power system sinusoidal signals. In wide-area Synchrophasor technology, PMU phasor measurements are required to be synchronized to UTC time with sufficient accuracy. Laverty et al introduced synchrophasor for anti-island- ing detection [11], and a prototype of the detector has been tested. In the method, the thresholds the detector should operate were dependent on analysis of the net- work, and a system of phase monitoring stations has been installed to acquire this data. To achieve this, a reference signal is acquired from a dependable utility site, for example a transmission sub- station, a power station or a major node on the network that would be considered to have a utility connection at all times excluding extremely unusual circumstances. This reference signal is acquired using Phasor Measure- ment Unit (PMU) technology, meaning that the signal will contain at minimum the voltage amplitude, fre- quency and phase angle at a specific and accurate time. The standard for representing Synchrophasors is IEEE C37.118 [11,12]. The reference signal is transmitted to local distributed generators around the power system, by means of Internet Protocol (IP) telecommunications. This may be via the Internet (public network) or via a secure utility network. Internet Protocol is the preferred com- munications protocol due to its flexibility and ease of reconfiguration which become important should the gen- erator be required to use a different reference site if the first becomes unavailable due to a fault or maintenance. The telecoms can be secured using IPSec tunneling, which is an integral part of the IPv6 standard. At the generator site, the reference signal is compared to the Synchrophasor acquired at the generator terminals. The time signatures of the Synchrophasors are aligned so that phasors taken at the same instant are compared. The phase difference between the generator and the reference site are compared against known typical operating condi- tions. When the phase between the generator and the reference site becomes abnormally large, the generator is considered to be islanded and will be disconnected from the utility. In principle, if at the moment islanding occurs the power imbalance between the generator and the islanded load is low than certain threshold, the generator may continue operating at the same frequency as when grid connected. However, natural variations in the grid fre- quency will be enough to lead to a phase difference be- tween the generator and the utility an d allow islanding to be detected. If the power imbalance is large, the frequency of the generator will be different to that of the utility and is- landing will be detected either by the frequency discrep- ancy, or by the rapid swing of the generators phase angle. Therefore, synchrophasor anti-islanding detector can operate in two modes. Firstly, using the phase difference, the detector will eventually detect that islanding has oc- curred. After approximately 2 seconds, the generator is out-of-sync with the utility supply and continuing to drift. Depending on how wide the threshold for phase differ- ence is set, the time delay may prove excessiv e. Alterna- tively, the detector can use the rate of change of phase, or the slip frequency of the generator. This is the rate at which the generators phase slips against the utility with respect to time. 3.2. Real-time Anti-islanding Detection using Synchrophasors While wide-area system monitoring using Synchrophasor offers improved opportunities for automatic detection of islanding conditions, the challenges include 1) a large amount of data are collected from each node and major- ity are normal data. Continuously transmitting large amount of data from a number of local sensing nodes to the core (host server or central co ntrol unit) will not help with real-time situation awareness and power system operation and control. 2) Current anti-islanding detection technologies such as Rate-of-Change-of-Frequency (RO- COF), Vector Shift, as well as phase and frequency analysis using multiple reference signals all need careful network and operation condition an alysis to set appropri- ate thresholds. The difficulty is that the operation condi- tions vary with time, detection based on current single window of power system conditions may fail either to detect the islanding condition or to cause nuisance trip- ping. Therefore, the aforementioned incremental learning framework provides a great potential in improving the near real-time monitoring and detection performance. To implement the proposed framework on wide-area monitoring system using Synchrophasor technologies, the distributed PMUs and the central unit are designed with different functionalities. 1) PMUs at distributed sites PMUs used in this monitoring system are based on the OpenPMUs developed at Queen’s University Belfast [11]. The OpenPMU can sample 6 channels (3 voltages, 3 currents) at 6.4 kHz, which gives 128 samples per cy- cle at 50 Hz or 60 Hz frequency. The ADC starts acquisi- Copyright © 2013 SciRes. EPE  K. LI ET AL. 966 tion on the rising edge of the external hardware sampling trigger whose signal is a 50 Hz / 60 Hz square wave which by means of a GPS receiver oscillates in phase with Coordinated Universal Time (UTC). The GPS re- ceiver used is a Garmin GPS-18x which outputs a TTL level one-pulse-per-second (1PPS) signal, a 1 Hz square wave disciplined and in phase with the transition of the UTC second. Firmware on a PIC microcontroller oper- ated as a fuzzy logic phase-locked-loop (PLL) which multiplies the 1PPS b y the Synchrophasor repor ting rates recommended in IEEE C37.118.1. The recommended reporting ra tes are 10/25 /50 repor ts per second in a 50 H z system, and 10/12/20/30/60 rep orts per second in a 60 Hz system. The PIC microcontroller also provides a time transfer mechanism to the Labview environment so that Synchrophasors can be time coded with UTC derived time. At present, synchrophasors in OpenPMU are com- puted using standard Windows PC from the analog waveform data within the Labview environment. The spectrum of nominally 4-cycles at line frequency is found using FFT. The three d ominan t frequen cy bands of the spectrum are used in an iterative curve fitting algo- rithm. The frequency, phase and amplitude of the meas- ured waveform are determined from the parameters of the synthesized waveform generated during curve fitting. Then, estimated Synchrophasor parameters are exported from Labview in CSV format, which contains the time code, amplitude, frequency and phase angle in ASCII strings representing decimal numbers. The CSV string is transmitted by Labview by means of UDP/IP (User Da- tagram Protocol over Internet Protocol) to a destination IP address and port number. To support the incremental learning based on the afore-mentioned method, additional functionalities are needed to integrate into the existing OpenPMU: a) The PMUs as local agents should be able to communicate with other PMUs, such as for reference signals from a utility dependent site of close proximity; b) Additional pre-processing step is added, including filtering and out- liers removal. c) Fast anomalies detection using ROCOF, Vector Shift, linear PCA, and dynamic PCA, etc. Once anomalies are detected, the corresponding data segment will be transmitted from the PMU to the core (central unit). If no abnormal situation is detected, then the data transmitted to the core will be further down-sampled significantly to reduce the overall data tran smission load. 2) Central unit. At present, the central unit (server) at Queen’s University is only used for data storage for post-event analysis. To implement the proposed incre- mental learning scheme, it is used as the core of the mon- itoring system. Basically, the central unit in the system collects all data transmitted from the PMUs, and builds an overall system view using distributed temporal-spatial model. It also uses advanced fault detection methods to monitor the whole system operation, such as PCA tech- niques (linear, dynamic, kernel based, nonlinear), model based, and support vector machine (SVM), etc. In this paper, we use linear PCA to detect islanding situations. Further, various islanding modes and conditions are re- corded, accumulated, and used to build a fuzzy system for fast inference. Thus, knowledge and experience are accumulated, and the incremental learning framework is implemented. Given the above design guidelines, a schematic of the wide-area system monitoring network using Synchro- phasor is shown in Figure 3. The original network of PMUs has already been deployed across the Great Brit- ain and Ireland electrical networks. This includes four PMUs in southern England, one in Manchester, one in Tealing, five on the Orkn ey islands, and two in Shetland. Additional PMUs operate on the Irish network providing similar data. Data is transmitted to a central unit (server) in the host organization QUB in an ASCII plain text format and stored and for further processing and analysis, such as for post analysis of events, determination of suitable anti- islanding relay event thresholds and online simulation of anti-islanding relays. 3.3. Preliminary Results Three PMUs (PMU-1, PMU-4, PMU-5) in the network captured one data set containing a frequency dip caused by a 1 GW loss in bulk generation as well as an islanding event occurred in response to the frequency dip. In the following, we show how the proposed framework is im- plemented. Figures 4, 5 and 6 show that three PMUs (PMU-1, PMU-4, PMU-5) at three different sites simultaneously Figure 3. Synchrophasor Anti -Islanding detection scheme. Copyright © 2013 SciRes. EPE 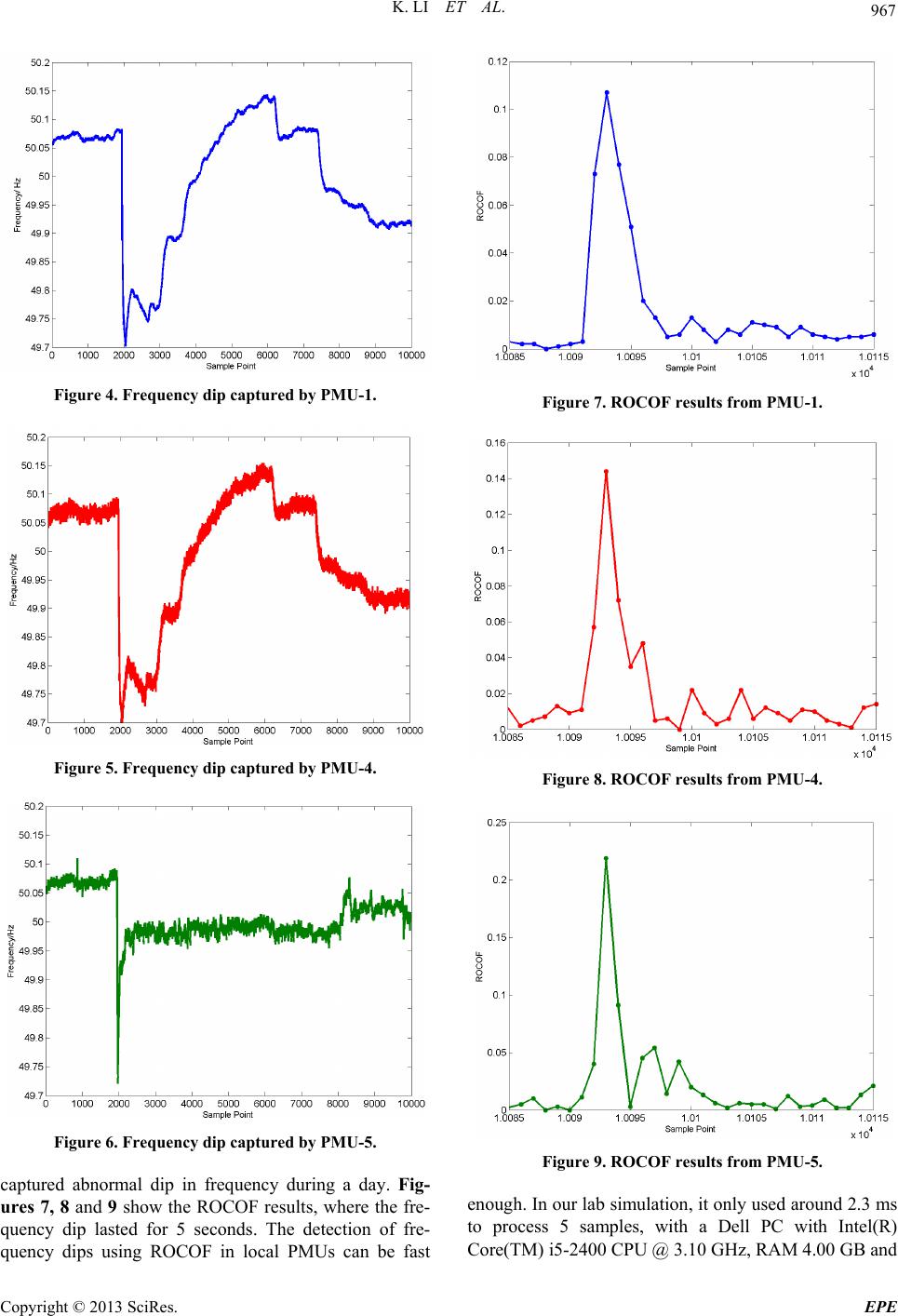 K. LI ET AL. 967 Figure 4. Frequenc y dip captured by PMU-1. Figure 5. Frequenc y dip captured by PMU-4. Figure 6. Frequenc y dip captured by PMU-5. captured abnormal dip in frequency during a day. Fig- ures 7, 8 and 9 show the ROCOF results, where the fre- quency dip lasted for 5 seconds. The detection of fre- quency dips using ROCOF in local PMUs can be fast Figure 7. ROCOF results from PMU-1. Figure 8. ROCOF results from PMU-4. Figure 9. ROCOF results from PMU-5. enough. In our lab simulatio n, it only u sed aroun d 2.3 ms to process 5 samples, with a Dell PC with Intel(R) Core(TM) i5-2400 CPU @ 3.10 GHz, RAM 4.00 GB and Copyright © 2013 SciRes. EPE 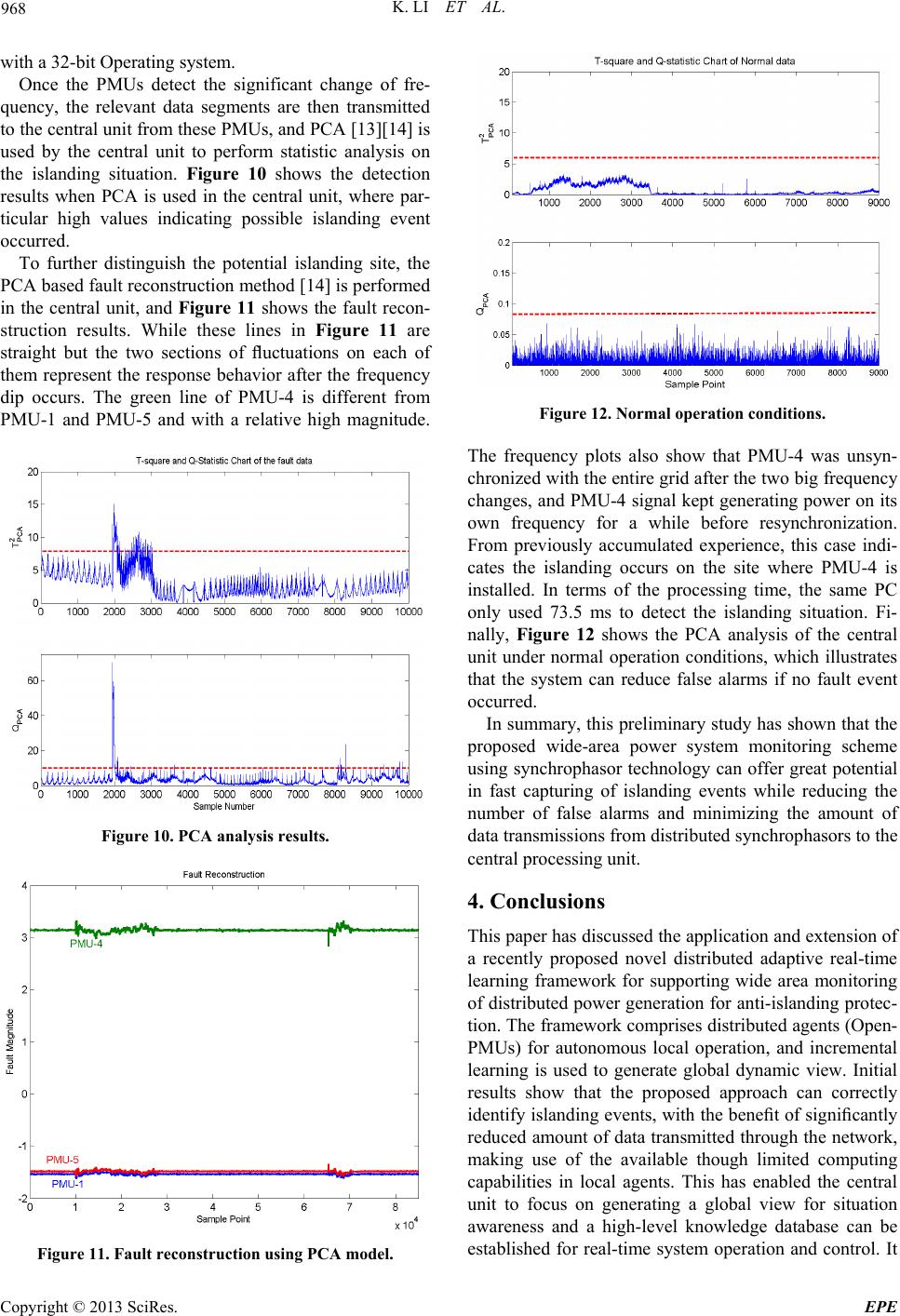 K. LI ET AL. 968 with a 32-bit Operating system. Once the PMUs detect the significant change of fre- quency, the relevant data segments are then transmitted to the central unit from these PMUs, and PCA [13][14] is used by the central unit to perform statistic analysis on the islanding situation. Figure 10 shows the detection results when PCA is used in the central unit, where par- ticular high values indicating possible islanding event occurred. To further distinguish the potential islanding site, the PCA based fault reconstruction method [14] is performed in the central unit, and Figure 11 shows the fault recon- struction results. While these lines in Figure 11 are straight but the two sections of fluctuations on each of them represent the response behavior after the frequency dip occurs. The green line of PMU-4 is different from PMU-1 and PMU-5 and with a relative high magnitude. Figure 10. PCA analysis results. Figure 11. Fault reconstruction using P CA model. Figure 12. Normal operation conditions. The frequency plots also show that PMU-4 was unsyn- chronized with the entire grid after the two big frequency changes, and PMU-4 signal kept generating power on its own frequency for a while before resynchronization. From previously accumulated experience, this case indi- cates the islanding occurs on the site where PMU-4 is installed. In terms of the processing time, the same PC only used 73.5 ms to detect the islanding situation. Fi- nally, Figure 12 shows the PCA analysis of the central unit under normal operation conditions, which illustrates that the system can reduce false alarms if no fault event occurred. In summary, this preliminary study has shown that the proposed wide-area power system monitoring scheme using synchrophasor technology can offer great potential in fast capturing of islanding events while reducing the number of false alarms and minimizing the amount of data transmissions from distributed synchrophasors to the central processing unit. 4. Conclusions This paper has discussed the application and extension of a recently proposed novel distributed adaptive real-time learning framework for supporting wide area monitoring of distributed power generation for anti-islanding protec- tion. The framework comprises distributed agents (Open- PMUs) for autonomous local operation, and incremental learning is used to generate global dynamic view. Initial results show that the proposed approach can correctly identify islanding events, with the benefit of significantly reduced amount of data transmitted through the network, making use of the available though limited computing capabilities in local agents. This has enabled the central unit to focus on generating a global view for situation awareness and a high-level knowledge database can be established for real-time system operation and control. It Copyright © 2013 SciRes. EPE  K. LI ET AL. Copyright © 2013 SciRes. EPE 969 should be noted that this paper only presents an early stage of the development of wide-area power monitoring system using the proposed distributed incremental learn- ing scheme, and future work will involve the develop- ment of a comprehensive suite of technologies for each PMU and for the central unit for different monitoring scenarios, and assessment of the long-term benefit of such scheme in real-time power system monitoring and control. 5. Acknowledgements This work was partially supported by Engineering and Physical Sciences Research Council (EPSRC) under grants EP/F021070/1, the Key Project of Science and Technology Commission of Shanghai Municipality under Grant No.11ZR1413100, National Natural Science Foundation of China under Grants 61273040 and Shanghai Rising-Star Program (12QA1401100). REFERENCES [1] H. He, “Self-adaptive Systems for Machine Intelligence,” Wiley-Interscience, 2011. doi:10.1002/9781118025604 [2] H. He, S. Chen, K. Li and X. Xu, “Incremental Learning From Stream Data,” IEEE Trans. Neural Networks and Learning Systems, Vol. 22, No. 12, 2012, pp. 1901-1914. [3] H. He and G. Garcia, “Learning from Imbalanced Data,” IEEE Transactions Knowledge and Data Engineering, Vol. 21, No. 9, 2009, pp. 1263-1284. doi:10.1109/TKDE.2008.239 [4] F. Lafarge and J. Descombes and X. Zerubia, “Textural Kernel for SVM Classification in Remote Sensing: Ap- plication to Forest Fire Detection and Urban Area Extrac- tion,” IEEE International Conference on Image Process- ing, Vol. 3, 2005, p. 1096. [5] S. Solomon and E. Shir, “Complexity, a Science at 30,” Europhysics News, Vol. 34, 2003, pp. 54-57. doi:10.1051/epn:2003204 [6] N. Shnerb, “The Importance of Being Discrete: Life Al- ways Wins on the Surface,” Proc. Natl. Acad. Sci., Vol. 97, 2000, pp. 10 322-10 324. [7] E. Matson, S. A. DeLoach and R. Bhatnagar, “Evaluation of Properties in Transition of Capability Based Agent Organization,” Web Intelligence and Agent Systems, Vol. 7, 2009, pp. 1-21,. [8] N. Jenkins, R. Allan, P. Crossley, D. Kirschen and G. Strbac, “Embedded Generation,” Power and Energy Se- ries 31. London, UK: Inst. Elect. Eng, 2000. doi:10.1049/PBPO031E [9] Eirgrid, “System Demand Data,” www.eirgrid.com, 2011. [10] J. Jiang, J. Yang, Y. Lin, C. Liu and J. Ma, “An Adaptive PMU Based Fault Detection/location Technique for Transmission Lines. i. Theory and Algorithms,” Power Delivery, IEEE Transactions on, Vol. 15, No. 2, 2000, pp. 486-493. doi:10.1109/61.852973 [11] D. Laverty, D. Morrow, R. Best and M. Cregan, “An- ti-islanding Detection Using Synchrophasors and Internet Protocol Telecommunications,” in Innovative Smart Grid Technologies (ISGT Europe), 2011 2nd IEEE PES Inter- national Conference and Exhibition on. IEEE, 2011, pp. 1-5. [12] IEEE Standard for Synchrophasors for Power Systems, IEEE Std. C37.118–2005 (Revision of IEEE Std. 1344-1995). [13] J. V. Kresta, J. F. Macgregor and T. E. Marlin. “Multi- variate Statistical Monitoring of Process Operating Per- formance,” The Canadian Journal of Chemical Engineer- ing, Vol. 69, No. 1, 1991, pp. 35-47. doi:10.1002/cjce.5450690105 [14] R. Dunia and S. Joe Qin, “Subspace Approach to Multi- Dimensional Fault Identification and Reconstruction,” AIChE Journal, Vol. 44, No. 8, 2004, pp. 1813-1831. doi:10.1002/aic.690440812
|