 Communications and Network, 2013, 5, 398-402 http://dx.doi.org/10.4236/cn.2013.53B2073 Published Online September 2013 (http://www.sci r p.org/journal/cn) Copyright © 2013 SciRes. CN Compari sons of Short-P refix Based Channel Estimation in Single-Carrier Communication Syst em s Huilei Li, Shiwen Fan, Lisha Gong, Guobing Cheng, Shaoqian Li National Key Laboratory of Science and Technology on Communications, University of Electronic Science and Technology of China, Chengdu, China Email: leehuilei@163.com Received August, 2013 ABSTRACT In this paper, we compare the performance between channel estimation based on compressed sensing (CS) and time-domain least square (LS) for single-carrier (SC) communication system. Unlike the conventional channel estima- tion t ech nique s suc h as fr eque nc y do main LS whic h is used in the cond itio n tha t the l engt h of p ilo t seq uence i s equa l to data sequence, the estimation scheme based on CS requires smaller length of pilot sequence. In this paper, the corres- ponding system structure is presented. Zadoff-Chu sequence is used to generate the pilot sequence, which is shown to perform better i n forming measurement matri x of CS than pseudo random seque nce. S imu lation results demonstrate that channel estimation based on CS achieves a better bit error rate (BER) performance than time domain LS with a smaller pilot sequence and thus raising data rate of the SC communication system. Keywords: Compre ssed Sensing; Time Domain Least Square; Single-carrier Communication Syst em; Zadoff-Chu Se- quence 1. Introduction Recently the single-carrier with frequency domain equa- lization (SC-FDE) communication system has drawn a great attention as an alternative to the orthogonal fre- quency division multiplexing (OFDM) communication system, especially in the uplink communications, be- cause it alleviates carrier synchronization problem and the peak-to-average power ratio (PAPR) of transmitted sequences is much lower than that of OFDM[1]. SC-FDE system requires precise channel state infor- mation (CSI) for the equalization. To estimate the CSI, the pilot blocks of SC-FDE are inserted between several data blocks in time domain. With the assumption that there are only L number of channel taps where L is smaller than the length of cyclic prefix (CP), the tradi- tional time domain LS estimation can be improved to be used in the condition that the length of pilot sequence is smaller than data sequence but still larger than cyclic pr efix. In thi s pa per , we compare channel estimation based o n compressed sensing (CS) and time-domain least square (LS) for the SC communication system. The length of pilot sequence of the compressed method can be smaller than c yclic prefix and can thus raising the data rate of the system. By choosing a good pilot sequence and cyclic prefix to form the C S measurement matr ix, we can obtain the sparse channel impulse response (CIR) vector. The rest of the paper is organized as follows. We start in Section 2 by describin g the system model. In Section 3, we review traditional frequency domain LS channel es- timation and time domain LS channel estimation which suits the condition that the length of pilot sequence is smaller than data sequence and larger than cyclic prefix. In Section 4, we introduce the idea of compressed chan- nel est i mat i o n re q uir i ng t he l e ngt h o f p ilo t se q ue nc e e ve n smaller than c yclic prefix. Si mulation result s are given in Section 5 and the paper is concluded in Section 6. 2. System Model Figure 1 shows the bloc k diagr am of the transmitter and receiver of the considered SC communication system. Modulation Information bits (a) Transmitter Insert PilotAdd CP Remove CP DFT Frequency Domain Equalization IDFT Demodulation (b) Receiver Figure 1. The considered SC commu nication syste m.  H. L. LI ET AL. Copyright © 2013 SciRes. CN We consider the single-carrier b lock transmission over the multipath Rayleigh fading channel with additive white Gaussian noise. At the transmitter, infor mation bits are mapped into data symbols depending on the modula- tion type. Each length-N data symbols appended with a length- cyclic prefix forms a data block. The cyclic prefix is assumed to be larger than the known channel impulse response length L to eliminate inter-block inter- ference (IBI). This is achieved by discarding the first received symbols corresponding to the cyclic prefix [2]. The pilot block is formed the same way as the data block while the pilot sequence of each pilot block is of length . After inserti ng pilo t a nd ad ding c yclic p refix, the transmit block is generated. Figure 2 shows the transmit block format o f the system. As depicted in Figure 2, the tr ansmit block consists o f pilot blocks and data blocks. Pilot sequence { } (0), (1),..., (1) p pppN − added by a length- CP forms the pilot block and { } (0), (1),..., (1),1,..., ii i x xxNiK−= , each with the same length of CP as the pilot block, forms K data blocks. At the receiver, after removing CP, channel estimation, fre- quency domain equalization which is the frequency do- main analog of what is done by a conventional time do- main equalizer[3], we obtain the estimated d ata symbols. By demodulation, these symbols are changed into the estimated in formation bits. 3. Channel Estimation of the Pilot Sequence Based on Least-square Channel Estimation In the case that the length of pilot sequence is larger than cyclic prefix, i.e. , the cyclic prefix of pilot block are copies of the last symbols of the pilot sequence. At receiver, after removing the c yclic prefix, the input- output relationship of the pilot sequence can be ex- presse d in matri x for m as foll o ws: (1) , , and are length- p sequence of re- ceived, input, and noise symbols, respectively. Note that the channel matrix is circulant with first column equal to the channel impulse response (CIR) ap- pended by ( ) zeros, therefore it can be diagona- lized by the orthonormal discrete Fourier trans- form(DFT) p Cyclic Prefix of Data Block Cyclic Prefix of Data Block Cyclic Prefix of Pilot Block Data Block KData Block 1Pilot Block Figure 2. Block for mat of the considered sy s tem. matrices where the diagonal elements are the DFTs of the channel impulse response. That is, 0 1 ** 1 00 00 00 0 00 p pp N H H hFHF FF H − == (2) where (.)* denotes complex-co njugate transpo se; F is the DFT matrix whose element is givenby 2 (1)(1)/ 1 (, )p jik N p FFi ke N π − −− = , 1, p ik N≤≤. 3.1. Traditional Frequency Domain LS Channel Estimation In the case that the length of pilot sequence is equal to that of data sequence, i.e. , after removing cyc- lic prefix, the received time-domain pilot sequence is transformed to the frequency domain by applying DFT to (1) , p ppppppp YFyFh xFnHXN== +=+ (3) , p and p N are length- frequency-domain response of received, input, and noise symbols, respec- tively. Therefore, the traditional LS channel estimation of p at the pilot sequenceis (4) 3.2. Time Domain Least-square Channel Estimation Usin g the ti me do main LS c hannel esti matio n, the le ngt h of pilot sequence can be reduced to be smaller than data sequence, i.e. . Therefore, the equation (1)-(3) are still satisfied. With t he a s su mp tion tha t t he c han nel i mp ul se r e sp ons e length is smaller than [4], the input-output rela- tionship of the system in frequency domain can be ex- pressed as (5) where stands for diagonal matrix with the column vector p X on its diagonal; is an matrix which retains only the first columns of F; and h is a length- column vector which retains the first elements of . Then the improved LS chan- nel estimatio n is (6)  H. L. LI ET AL. Copyright © 2013 SciRes. CN where (7) Then, by doing -points DFT of , we obtain the estimated channel frequenc y response of the pilot sequence. That is, __, p LSp LS N H Fh= (8) where 2 (1)(1)/ ( ,),1,1 jik N N cp F ikeiNkN π − −− =≤≤≤≤ . 4. Channel Estimation of the Pilot Sequence Based on Compressed Sensing When t he length ofpilo t sequence is not smaller tha n that of cyclic prefix, i.e. , the cyclic prefix of the pilot sequence is the copy of the last symbols of the pilot sequence, and then (1) is equal to (9) where 01 1 10 2 12 , pp cp p cp ppp cp N NN NN p N NNN xx x xx x T xx x − −+ −+ −− − = (10) is a Toeplitz matrix formed by the pilot se- quence. Now we consider the case that the length of the pilot sequence is smaller than cyclic prefix, i.e. . Assuming the cyclic prefix of the pilot block in the form of vector is , then the Toeplitz matrix p in (9) can be modified to be 011 1 10 1 1201 1 cpcp p cp ppcpcp p N NN pN N NNNN xc cc xx Tc xx xcc − −+ − − −−−+ = (11) which is a Toeplitz matrix for med by both the pilot sequence and its cyclic prefix. It is known that CS can be effectively utilized in linear, time-invariant system identification problems provided the impulse response of the system is (approximately or exactly) sparse. An immediate application is in wireless multipath channel estimation[5]. As the length- CIR h of the sparse wireless channel has only few of its taps nonzero, then using (9) we can change the matter of channel estimation into the matter of recovery of h based on compr essed sensing. (12) Therefore, is considered as the CS measurement matrix. The channel estimation based on CS introduced in this p ape r uses t he or thogon al matching pursuit (OMP) algorithm to solve the problem of compressed sensing. 4.1. Selection of Pilot Sequence Advances in CS show that the sparse can be recon- structed from the measurement with high probabili- ty when measurement matrix satisfies RIP[6]. However , there is no known method to t est in polynomial time whether a given matrix satisfies RIP . An alter native approach we adopt here is to minimize the coherence of [7]. The coherence of a measurement matrix is the maximum absolute cross-correlation between the normalized columns of : 1, 22 |, | max , pcp lk lk TlkNlk ϕϕ µϕϕ ≠ ≤≤ = (13) The smaller the coherence p T µ is, the better the measurement matrix preserves the information of the sparse vector h in the produced samples [7]. is formed by elements of the pilot block, so the selection of pilot seq uence an d its cyclic p refix is impo r- tant. In this paper, we choose Zadoff-Chu sequence which has constant envelope and uniform spectrum[8] to form the pilot sequence and its cyclic prefix. Compared with pseudo random sequence, measurement matrix formed by Chu sequence has smaller . A length- Chu sequence used as the pilot sequence is re p r esented as 2 /, ( 1)/, , pp pp jrkNfor even N kjrkkNfor oddN e Pe π π + = (14) where r is relatively prime to p N . T he lengt h- cyc- lic prefix of the pilot sequence is generated the same way as the pilot sequence using a length- Chu se- quence . Simulation results show that measurement matrix formed by Chu sequence performs better in the com- pressed channel estimation than pseudo random se- quence. 4.2. Proposed Compressed Channel Estimation In this paper, the compressed channel estimation is based on OMP algor ithm. O MP is a n iterati ve greed y algor ithm that selects at each step the column, which is most corre- lated with the current residuals[9]. With OMP, faster 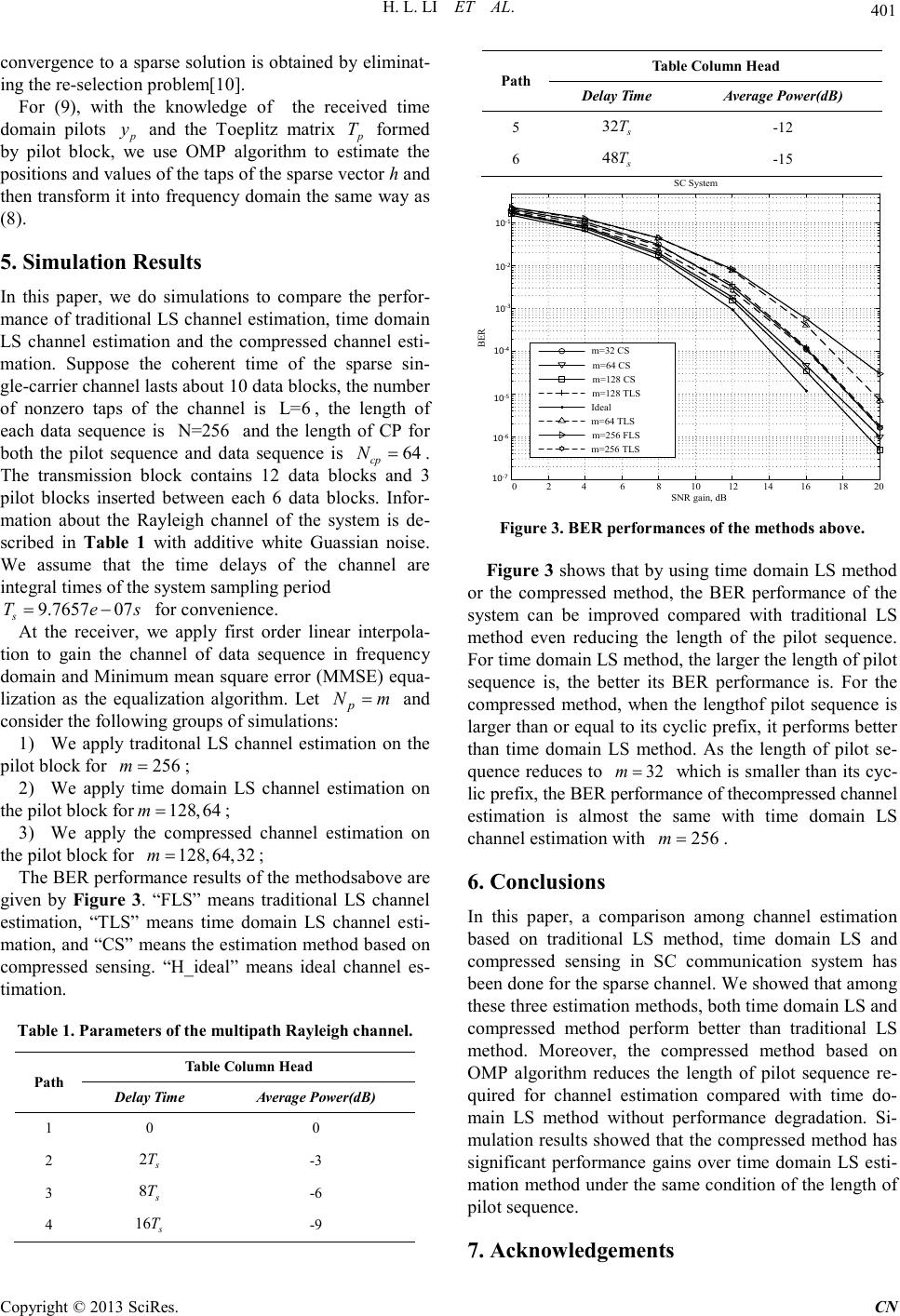 H. L. LI ET AL. Copyright © 2013 SciRes. CN convergence to a sparse solution is obtained by eliminat- ing the re-selec tion problem[10]. For (9), with the knowledge of the received time domain pilots and the Toeplitz matrix p T formed by pilot block, we use OMP algorithm to estimate the positions and values of the taps of the sparse vector h and then transform it into frequency domain the same way as (8). 5. Simulation Results In this paper, we do simulations to compare the perfor- mance of traditio nal LS channel estimatio n, ti me d omain LS channel estimation and the compressed channel esti- mation. Suppose the coherent time of the sparse sin- gle-carrier channel lasts about 1 0 d ata b locks, the number of nonzero taps of the channel is , the length of each data sequence is and the length of CP for both the pilot sequence and data sequence is 64 cp N=. The transmission block contains 12 data blocks and 3 pilot blocks inserted between each 6 data blocks. Infor- mation about the Rayleigh channel of the system is de- scribed in Table 1 with additive white Guassian noise. We assume that the time delays of the channel are integral times of the s ystem sampling pe r iod 9.7657 07 s T es=− for conve nie nce. At the receiver, we apply first order linear interpola- tion to gain the channel of data sequence in frequency domain and Minimum mean square error (MMSE) equa- lization as the equalization algorithm. Let and consider the following groups of simulations: 1) We apply traditonal LS channel estimation on the pilot block for ; 2) We apply time domain LS channel estimation on the pilot blo c k for ; 3) We apply the compressed channel estimation on the pilot block for ; The BER performance results of the methodsabove are given by Figure 3. “FLS” means traditional LS channel estimation, “TLS” means time domain LS channel esti- mation, and “CS” means the estimation method based on compressed sensing. “H_ideal” means ideal channel es- timation. Table 1. Parameters of th e multipath Rayleigh channel . Path Table Column Head Delay Ti me Average Power(dB) 1 0 0 2 -3 3 -6 4 -9 Path Table Column Head Delay Ti me Average Power(dB) 5 -12 6 -15 0246810 12 14 16 18 20 SNR gain, dB BER SC System m=32 CS m=64 CS m=128 CS m=128 TLS Ideal m=64 TLS m=256 FLS m=256 TLS 10 -7 10 -6 10 -5 10 -4 10 -2 10 -3 10 -1 Figure 3. BER performances of t he methods above. Figure 3 shows that b y using ti me do main LS me thod or the compressed method, the BER performance of the system can be improved compared with traditional LS method even reducing the length of the pilot sequence. For time domain LS method, the larger the len gth of pilot sequence is, the better its BER performance is. For the compressed method, when the lengthof pilot sequence is larger than or equal to its cyclic pr efix, it performs better than time domain LS method. As the length of pilot se- quence reduces to which is smaller than its cyc- lic prefix, the BER perfor mance o f thecompre ssed channel estimation is almost the same with time domain LS channel estimation with . 6. Conclusions In this paper, a comparison among channel estimation based on traditional LS method, time domain LS and compressed sensing in SC communication system has been done for the sparse channel. We showed that among these three estimation methods, both time domain LS and compressed method perform better than traditional LS method. Moreover, the compressed method based on OMP algorithm reduces the length of pilot sequence re- quired for channel estimation compared with time do- main LS method without performance degradation. Si- mulation results showed that t he compressed method has significant performance gains over time domain LS esti- mation method under the same condition of the length of pilot sequence. 7. Acknowledgements  H. L. LI ET AL. Copyright © 2013 SciRes. CN This work is supported in part by the National Science Foundation of China under Grant number 61101101, National Grand Special Science and Technology Project of China under Grant No. 2010ZX03006-002-02, Pro- gra m for N ew Cent ury E xcel lent Ta lents in U nive rsit y o f China ((NCET110058), the Foundation Project of Na- tional Key Laboratory of Science and Technology on Communications under Grant 9140C020404120C0201, and Key Laboratory of Universal Wireless Communica- tions, Beijing university of Posts and Telecommunica- tions, Ministry of Education, P.R.China (No. KFKT- 2012102). REFERENCES [1] D. Ki m, U.-K. K won and G.-H. Im, “Pilot Positon Selec- tion and Detection for Channel Estimation of SC-FDE,” IEEE Communications Letter, Vol. 12, No. 5, 2008, pp. 350-352. doi:10.1109/LCOMM.2008.080071 [2] N. Al-Dhahir, “Single-Carrier Frequency-Domain Equa- lization for Space-Time Block-Coded Transmissions Over Frequency-Selective Fading Channels,” IEEE Communication Letters, Vol. 5, No. 7, 2001, pp. 30 4-306. doi:10.1109/4234.935750 [3] D. Falconer, S. L. Ariyavisitakul, A. Benyamin-Seeyar and B. Eidson, “Frequency Domain Equalization for Sin- gle-Carrier Broadband Wireless Systems,” IEEE Com- munication Magazine, 2002, pp. 58-66. doi:10.1109/35.995852 [4] M. K. Ozdemir and H. Arslan, “Channel Estimation for Wireless OFDM Systems,” IEEE Communications Sur- veys & Tutorials, Vol. 9, No. 2, pp. 18-48, 2nd Quarter, 2007. [5] J. Haupt, W. U. Bajwa, G. Raz and R. Nowak, “Toeplitz Compressed Sensing Matrices with Applications to Sparse Channel Estimation,” IEEE Transaction on In- formation Theory, Vol . 56, No. 11, 2010, pp. 5862-5875. doi:10.1109/TIT.2010.2070191 [6] E. J. Candes and T. Tao, “Near-optimal Signal Recovery from Random Projections: Univeral Encoding Strate- gies,” IEEE Transaction on Information Theory, Vol. 52, No. 12 , 2006, pp. 5406-5425. doi:10.1109/TIT.2006.885507 [7] C. H. Qi and L. N. Wu, “A Study of Deterministic Pilot Allocation for Sparse Channel Estimation in OFDM Sys- tem,” IEEE Communication Letters, Vol. 16, No. 5, 2012, pp. 742-744, May, 2012. doi:10.1109/LCOMM.2012.032612.112553 [8] C.-T. Lam and D. D. Fal coner, F. Danilo-Lemoine and R. Dinis, “Channel Estimation for SC-FDE Systems Using Frequency Domain Multiplexed Pilots,” Vehicular Tech- nology Conference, 2006, pp. 1-5. [9] T. Tony Cai and Lie Wang, “Orthogonal Matching Pur- suit for Sparse Signal Recovery With Noise,” IEEE Transactions on Information Theory, V o l . 57 , N o. 7 , 2011, pp. 4680 -4688.doi:10.1109/TIT.2011.2146090 [10] G. Z. Karabulut, A. Yongacoglu, “Sparse Channel Esti- mation using Orthogonal Matching Pursuit Algorithm,” Vehicular Technology Conference, pp. 3880-3884, IEEE, 2004.
|