L. SUSILO ET AL.
Copyright © 2013 SciRes. EPE
936
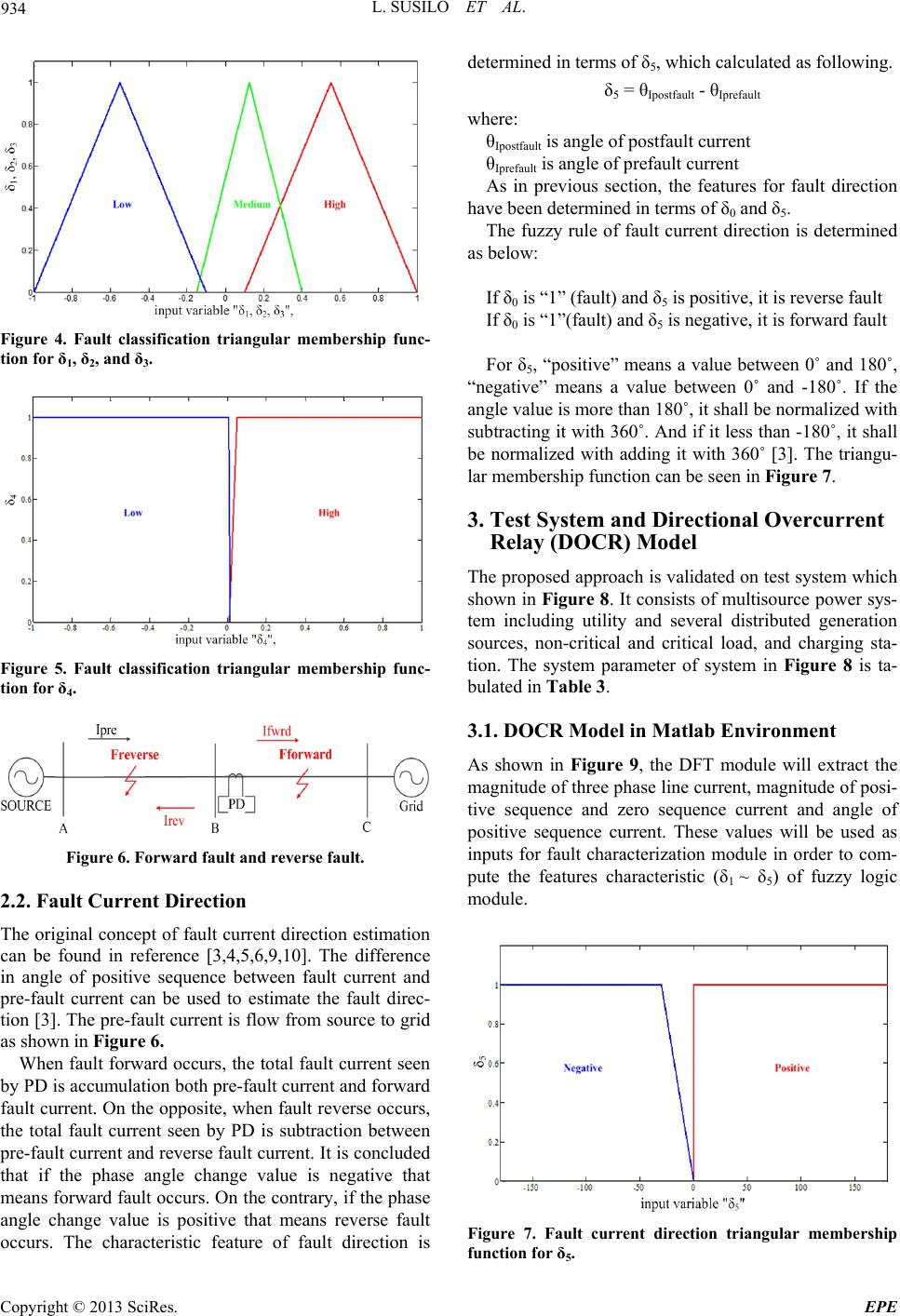
Table 4. Simulation result for fault location at F1 (PD3 and
PD7).
Fault information seen by PD
Fault type Fault direction Current Angle
(degree)
Fault
type
Protection
Device
No.
A-B-G B-C A-B-CForward Reverse Pre-faultFault
PD3 - - - 26.7 131.7
A-B-G
PD7 - - - 28.1 -56.8
PD3 - - - 26.7 128.2
B-C
PD7 - - - 28.1 -57.9
PD3 - -
- 26.7 138.3
A-B-C
PD7 - -
- 28.1 -58.4
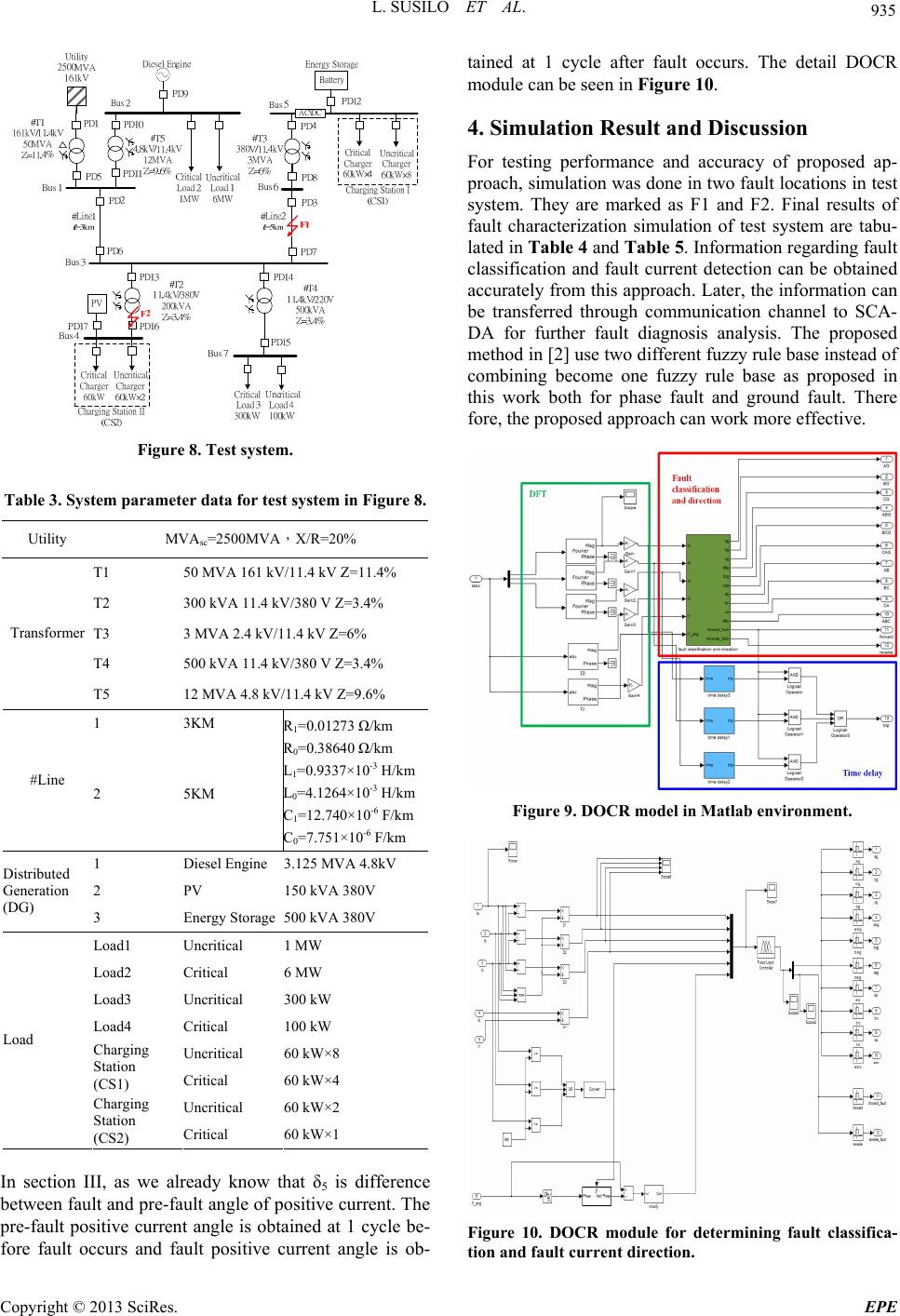
Table 5. Simulation result for fault location at F2 (PD13
and PD16).
Fault information seen by PD
Fault type Fault direction Current Angle
(degree)
Fault
type
Protection
Device
No.
B-G B-C A-B-C Forward Reverse Pre-faultFault
PD13 - - - 25.9 -46.4
B-G
PD16 - - - 28.9 158.3
PD13 - - - 25.9 -52.6
B-C
PD16 - - - 28.9 164.6
PD13 - - - 25.9 -52.8
A-B-C
PD16 - - - 28.9 171.4
To detect the ground fault existence in system, the ze-
ro sequence current value has been considered. The de-
tection of ground fault is denoted as δ4 in the proposed
fuzzy logic scheme. The performance of proposed ap-
proach has also been studied for variation of operating
conditions. The characteristic features value can be vary
according to system parameter change and configuration.
Any significant change can affect the fault current direc-
tion decision. Therefore, load flow study shall be per-
formed at first in order to determine the normal current
flow direction for pre-fault current reference.
5. Conclusions
An approach applying fuzzy logic algorithm (FLA) for
fault current characterization was presented. The DOCR
model based on this approach is developed in Matlab
environment. DOCR model can operate and perform
fault current characterization within 1 cycle after fault
occurring. In addition to the FLA ability, not only fault
detection was conducted; fault classification and fault
current direction were also determined. Due to FLA has
property to make decision in parallel, the whole process
of fault current characterization take a very short time.
The proposed DOCR model was applied to test power
system and show accurate result as expected. Moreover,
the proposed DOCR model can improve effectiveness of
existing fault diagnosis system with delivering both its
operating status and the fault current character informa-
tion.
REFERENCES
[1] Y. Sekine, et al., “Fault Diagnosis of Power Systems,”
Proceedings of the IEEE, Vol. 80, No. 5, May 1992, pp.
673-683. doi:10.1109/5.137222
[2] R. N. Mahanty and P. B. Gupta Dutta, “A Fuzzy Logic
Based Fault Classification Approach Using Current Sam-
ples Only,” Electric Power Systems Research, 77, 2007,
pp. 501-507.doi:10.1016/j.epsr.2006.04.009
[3] A. K. Pradhan, A. Routray and M. S. Gudipalli, “Fault
Direction Estimation in Radial Distribution System Using
Phase Change in Sequence Current,” IEEE Transactions
On Power Delivery, Vol. 22, No. 4, 2007, pp. 2065-2071.
[4] A. Ukil, B. Deck and V. H. Shah, “Current-Only Direc-
tional Overcurrent Relay,” IEEE Sensor Journal, Vol. 11,
No. 6, 2011, pp. 1403-1404.
doi:10.1109/JSEN.2010.2094186
[5] A. K. Pradhan and P. Jena, “Solution to Close-in Fault
Problem in Directional Relaying,” IEEE Transactions On
Power Delivery, Vol. 23, No. 3, 2008, pp. 1690-1692.
doi:10.1109/TPWRD.2008.923149
[6] A. Ukil, B. Deck and V. H. Shah, “Smart Distribution
Protection Using Current-only Directional Overcurrent
Relay, IEEE PES Conference Innovative Smart Grid
Technology, 2010, pp. 1-7.
[7] O. A. S. Youssef, “Fault Classification Based on Wavelet
Transforms,” IEEE PES T&D Conference and Exposition,
2001, pp. 531-536.
[8] S. A. Gafoor and P. V. R. Rao, “Wavelet Based Fault
Detection, Classification and Location in Transmission
Lines,” First International Power and Energy Confer-
ence- PECon, November 2006, pp. 114-118.
[9] S. Das, N. Karnik and S. Santoso, “Distribution
Fault-Locating Algorithms Using Current Only,” IEEE
Trans. On Power Delivery, Vol. 27, No. 3, 2012, pp.
1144-1153. doi:10.1109/TPWRD.2012.2191422
[10] A. Ukil, B. Deck and V. H. Shah, “Current-Only Direc-
tional Overcurrent Protection for Distribution Automation:
Challenges and Solutions,” IEEE Transactions on Smart
Grid, Vol. PP, No. 99, August 2012, pp. 1-8.